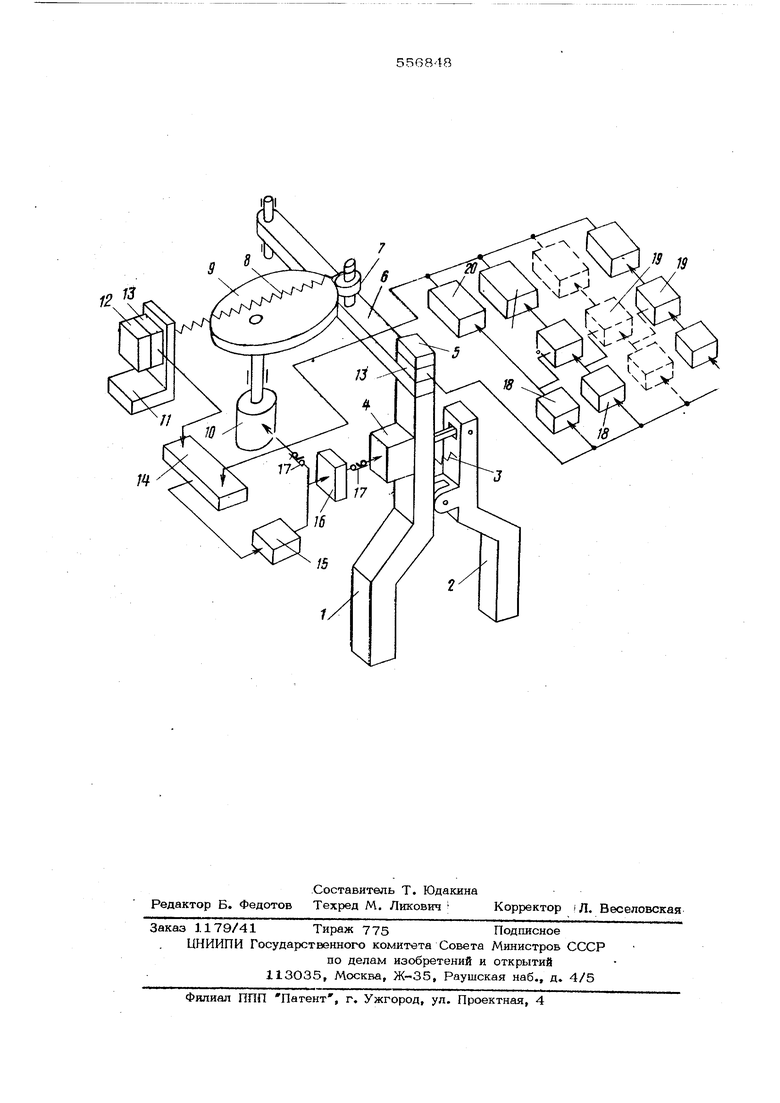
(54) АВТООПЕРАТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ Цель изобретения - повышение производительности автооператора. Это достигается нутем соединения измерительного датчика с преобразователем аналог-распределительный код, связью выходов преобразователя с усилителями с регулируемыми коэффициентами усиления i( соединением выходов усилителей со входом элемента, сравнения.; На чертеже схематично изображен пре; лагаемый автооператор. Он включает в с&бя захват с губками 1 и 2, сжимаемыми пружиной 3 и разжимаемыми приводом сжатия-разжатия 4 (например электромагни- .том); подвеску 5, при помощи которой захват закреплен на поворотном кронштейне 6 ролик 7, установленный на кронщтейне 6 посредством пружины 8, поджимаемой k кулачку 9 следящий двигатель 10, связанный с кулачком 9; кронштейн 11, в котором закреплен опорный элемент 12 пружины 8, два датчика давления 13, размещенных под подвеской 5 и опорным элементом 12; элемент сравнения 14, Первый вход ко торого соединен с датчиком 13, установлен ным под элементом 12, а выход через усилитель 15 связан непосредственно с двигателем 10 и через нуль-орган 16.- с при водом,4« Кроме того, автооператор содер ккт привод подъема и опускания его на деталь и командоаппарат (не показаны), управляющий приводом подъема и опускания и нормально замкнутыми конечными выключателями 17, установденными в соединениях элемента сравнения 14 с двигателем 10 И приводом 4, непосредственно перед двигателем 1О и приводом 4. Автооператор также содержит преобразователь аналог-распределительный код , выполненный, например, на пороговых элементах 18 (их порог в том порядке, в каком они расположены на чертеже, возрастает справа налево) и нормально закрытых ключах 19, и усилители 20 с регулируемы ми коэффициентами усиления, входы последовательно-соединены с выходами преобразователя. Выходы усилителей 20 параллельно связаны со вторым входом элемента сравнения 14, а входы преобразователя соединены с датчиком 13, установленным на захвате. Число выходов преобразователя аналог распределительный код и число усилителей 2О равно количеству емкостей, по которым должна осуществляться сортировка. При использовании автооператора его вначале требуется настроить. Настройка производит ся исходя из того, что обшее время, необходимое для рдссортировки партии из N деталей равно Т Е t N - , где i - время доставки детали из исходной позици. в -г-ую тару, Ni - число деталей в партии, подлежащих адресованию в i -ую тару. Величина Т .чloжeт быть представлена и в виде Т 1 N 5 t. где - вероят- ность пойвпения в рассортируемой партии деталей, которые подлежат адресованию в f -ую тару. Производительность автооиератора будет тем больше, чем меньше Т, а значит и чем меньше Г t- PJ .Но последняя величина имеет минимум npHij«k/Pj где { - определенный коэффициент пропорциональности. Для того, чтобы производительность автооператора была наибольщей, нужно, чтобы детали, которым соответствует большее , адресовались в тару с меньшим i i т.е. чем чаще детали должны попадать в данную тару, тем меньше должно быть время доставки в эту тару или при постоянной скорости движения зах вата, тем ближе к исходной позиции должна находится тара, На основании изложенного производится предварительная настройка автооператора. Она практически состоит из двух частей « подготовки данных для настройки и собственно настройки. Подготовка данных состоит в статическом ббГследовании деталей, подлежащих сортировке, и определении всех Р- - вероятностей появления деталей, ад ресуемых в каждую тару. Собственно наст« состоит в регулировке коэффициентов усиления усилителей 20. При этом каждый усилитель настраивается так, чтобы при выбранном коэффициенте усиления и опр&- деленнол- сигнале от измерительного датчика 13, установленного на захвате, деталь, адресовалась в определенную тару, соответствующую наибольшей производительности сортировки. После настройки автооператор устанавивают в исходное положение, так, чтобы ахват находился над конвейером при таком оложении кулачка 9, в котором натяжение ружины 8 минимально. Затем при помощи« порного элемента 12 пружины 8 произвоят регулировку последней так, чтобы сигалы на входах элемента 14 были рйвны и а его выходе сигнал был равен нулю. При акой регулировке в исходном положении втооператора привод 4 включен, 1 2 разжаты, двигатель 1О выключен. Включение автооператора .в работу произодится путем В1и1ючения командоаппарата. о сигналу от командоаппарата привод подъема и опускания опускает автооператор на
деталь, находящуюся на конвейере. Далее командоаппарат размьпсает конечные выключатели 17. Привод 4 выключается н под действием пружины 3 губки 1 и 2 сжимаются, захватывая деталь. После этого по .команде от командоаппарата автооператор поднимается приводом подъема и опускания, а затем командоаппарат замыкает конечные выключатели 17. При подъеме автооператора на выходе датчика 13, установленного :под подвеской, появляется сигнал, соответ, ствующий весу детали, зажатой между губками 1 и 2. Этот сигнал подается на пороговые элементы 18. В зависимости от вел гчины сигнала срабатывают либо первый (считая справа), либо первый и второй,либо первый, второй и третий и т.п. пороговые элементы 18. При этом не выключает ся ни один из ключей-19, либо выключается первый, либо первый и второй и т.д. В результате на бдном из выходов преобразователя аналог-распределительный код (либо на первом, либо на втором, либо на третьем и т.д.) появляется сигнал. Этот сигнал поступает на соответствующий усилитель 20, откуда после умножения на настроенный коэффициент усиления этого усилителя он подается на вход элемента сравнения 14. На другой вход элемента 14 подается сигнал от датчика 13, установленного под опорным элементом 12 пружины 8 На выходе элемента 14 появляется сигнал, равный разности входных сигналов. Этот сигнал усиливается в усилителе IB-и после замыкания конечных выклкЭчателёй 17 пендается на двигатель 10. На привод 4 от элемента сравнения не пpoxoдитi поскольку на выходе нуль-органа 16 сиг нал может появиться только тогда, когда на его входе сигнал равен нулю. Двигатель ,1О поворачивает кулачок 9, который, на- жимая на ролик 7, заставляет Перемещать;ся поворютный кронштейн 6 с захватом и зажатой в нем деталью. При повороте кулачка 9 пружина 8 натягивается, опорный элемент 12 пружины 8 нажимает на размещенный под ним датчик давления 13 и последний: вы дает сигнал, являющийся функцией положения кронштейна 6. Когда этот СИГН61Л становится равным сигналу, посту- пающему.т усилителя 20, навыходе элемента сравнения 14 сигнал становится ра&
рым нулю и двигатель 10 оЬтанавливается. Одновременно с этим на выходе нуль-органа 16 сигнал появляется, привод 4 сжатия -разжатия губок 1 и 2 включается, губки разжимаются и деталь|падает в тару, предназначенную для деталей данного веса. Подвеска 5 перестает нажимать на датчик 13 , установленный под ней, на выходе датчика сигнал исчезает а на выходе элемента сра&нения 14 появляется вновь, но уже другого знака. Двигатель 1О поворачивается в обратном направлении, Натшкение пружины 8 уменьшается и сигнал от датчика 13, установленного под опорным элементом 12.
рружины 8, также уменьшается. Когда сигналы на входе элемента 14 станут равными, на выходе этого элемента сигнал- исчезает, а двигатель 10 останавливается. На выходе нуль-органа 16 сигнал
появляется, привод 4 включается и Губки 1 и 2 разжимаются. Далее дикл повторяется.
Таким образом, автооператор снимает детали с конвейера и переносит их в ту или
иную тару в зависимости от веса и от вели- |чины коэффициента усиления соответствук щего усилителя. Поскольку усилители настроены по изложенному принципу, часто поя&ляюшиеся детали будут адресоваться в ближ-
|ние ёмкости, а редко появляющиеся - в даль- ,ние. За .счет этого будет, обеспечено минимальное время рассортировки всей партии деталей..
Формула изобретения
Автооператор для перемещения деталей
по авт.св. №499903, отличающийс я тем, что, с целью повыщенйя производительности, он снабжен преобразователем аналог-распределительный код, выполненным, например, на пороговых элементах и ; нормально замкнутых ключах, и усилител ми с регулируемым коэффициентом усиления, «число которых соответствует количеству е нкостей для сортируемых деталей, причем вььход измерительного датчика, установленного на захватном органе, соединен с входами преобразователя аналог-распределительный код, выходы которого через усилители подкуиочаны к элементу сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1989 |
|
RU1816003C |
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1990 |
|
RU2013472C1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ А.Н.Алексеева для управления подачей воды в промывные ванны гальванических линий и устройство для его осуществления | 1987 |
|
SU1504294A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИЛИНИЯМИ | 1972 |
|
SU336648A1 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Автоматическая линия для гальванохимической обработки изделий на подвесках | 1986 |
|
SU1350193A1 |
| Устройство для определения порядковых номеров ванн гальваноаппарата | 1982 |
|
SU1057959A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Способ определения площади деталей при гальваническом процессе и устройство для его осуществления | 1986 |
|
SU1315531A1 |