Изобретение относится к области гальванотехники и /преаназначено для управления автоматическими автооле;раторного типа линиями нанесения .покрытий, работающими по одному технологическому процессу или ло нескольким процессам попеременно.
Известны устройства для упра;вления автоматическими линиями, содержащие блок программ, блок совладений, блок горизонтального перемещения автоо-ператора, блок вертикального перемещения траверсы автооператора, блок переключения команд. В этом устройстве блок программ ,непосредственно связан с блоком .совпадений, блоками горизонтального и вертикального перемещений, ,блоком переклюния команд, блок совпадений .подсоединен к блокам горизонтального и вертикального перемещений; входы блока переключения команд соединены с блоком вертикального перемещения.
Недостатком известного устройства является то, что о,но имеет ограниченные функциональные возможности. Командоаппарат автоматической линии, собранный с использованием этого устройства на задаадный .технологический процесс, не может использоваться для другой линии, если она имеет иную последовательность Выполнения технологических операций, или иное расположение места загрузки-разгрузки обрабатываемых из)делии.
ИЛИ иное количество ванн покрытий. Для jicпользования командоапларата в этих случаях необходимо доба1вить новые элементыв программный блок и блок совпадений, произвести перекоммутацию этих блоков и электроразводки линии.
Целью предлагаемого изобретения является разработка такого устройства для управления автооператором, которое обладало бы широкими функциональными возможмостя.ми, т. е. могло бы быть использовано без какойлибо перекоммутации и переналадки для любой автооиератцрной линии нанесения покрытий, независимо от назначения технологического процесса, 1порядка выполнения технологических операций, ко.личестна занн покрытий, местоположения загрузк:-1-раагрузки деталей, количества команд на перемещение автоолератора.
Предлагаемое устройство отличается от известного тем, что В нем выходы блока переработки информации подключены к программному устройству, выходы которого связаны с регистром команд и регистром задания позиций, реверсивному блоку счета позиций, блоку счета- времени и блоку управления автооператором, один из выходов которого связан с блоком счета времени, а входы его соединены непосредственно и через блок совпадений с бло,ком счета времени и посредстзом регистра команд с программным устройством.
Применение предложенного устройства позволяет получить следующие преимущества: а) создать единый командоаппарат для управления любыми однолроцессными автоопер а тор ны .ми л и ни я м и;
б) ионользовать при изготовлении командоапарагов линий передовые .методы производства, например монтаж; его производится с использоваиием печатных схем;
IB) организовать серийный выпуск комаидоаопаратов;
г)уменьшить габариты командоалпаратоз
в 5-10 раз;
д)уменьшить число элементов командоаппарата в 2-3 раза;
е)производить пере; аладку линии иа другую програ.мму практически в течение нескольких секунд;
ж)сократить сроки монтажа и налад/кн линий;
|з) сократить число конечных выключателей в 15-20 раз;
и) упростить электроравводку в пределах линии и снизить стоимость ее изготовления.
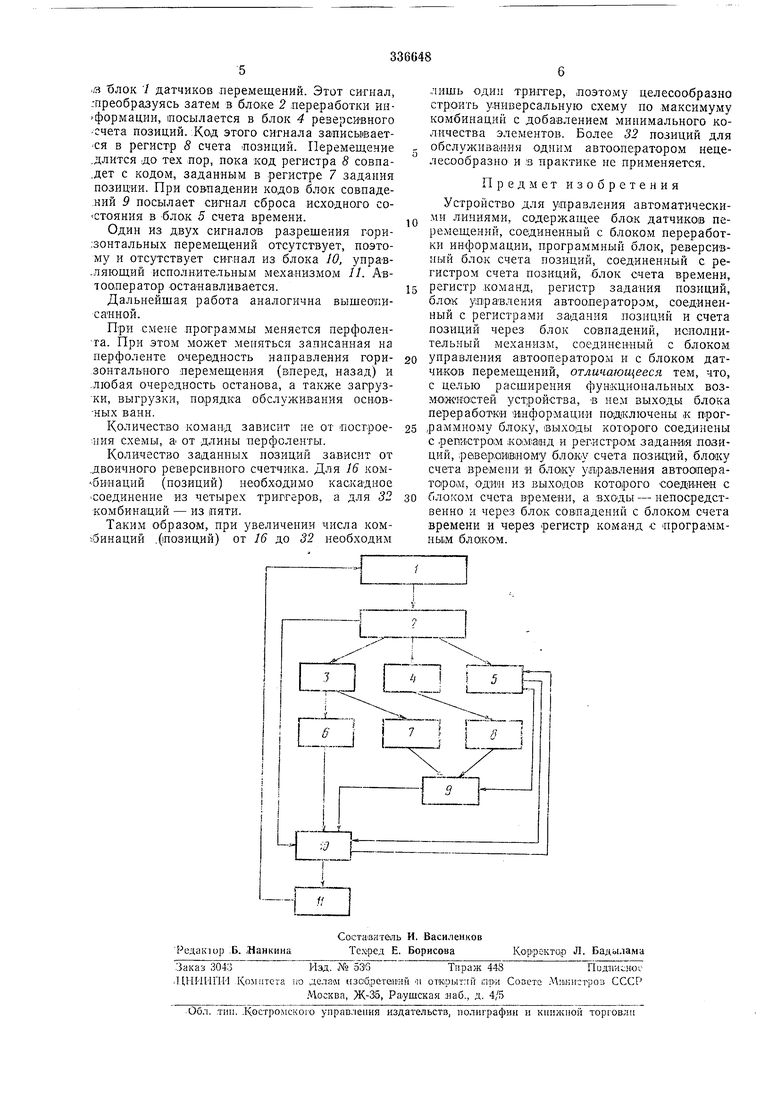
Блок-схема предлагаемого устройства приведена па чертеже.
Опа содерл ит блок / датчиков перемещений, блок 2 переработки информации, дрограммный блок 3, блок 4 реверсивного счета позиций, блок 5 счета времени, регистр команд 6, регистр 7 задания позиций, регистр 8 счета позиций, блок совпадений 9, блок 10 управления автооператором, исполнительный механизм И.
Питание блОКов и .регистров осуществляется стабил-изированным источником питания.
Блок / датчиков перемещений состоит из совОКупности фоторезисторав, включенных по схеме дev итeля напряжения. ,
Блок 2 переработки ипфор ции содержит статические триггеры, фиксирующие 1ноложение датчиков (верхнее, «ижнее), преобразователи, преобразующие .потенциальный сигнал от датчиков перемещений в импульсный.
Программный блок 3 состоит И1з регнстроа, фоторезисторав, включенных ino схеме делителя напряжения, лентопротяжного механизма с приводом и перфолентой, которая я,вляется носителем информации.
Блок 4 реверсивного , счета позиций представляет собой ;реверсивный счетчик двоичных чисел, состоящий из статических триггеров.
Блок 5. счета времени состоит .из распределителей и задающего время мультивибратора. Регистр команд 6, регистр 7 задания позиций, регистр 8 счета позиций представляют собой совокупность статических триггеров. -Блок совпадеш-пТ .9 1вы.нолнен на логически.х элементах со.в:1адеиия «PI.
влево, вверх, вниз) автооператора, магнитных усилителей и магнитных пускателей.
Исполнительный механизм 11 состоит из двигателей вертикального и горизонтального перемещений.
В исходном положении схемы сигналы из блока / датчиков перемещений поступают е блок 2 .переработки информации и, преобразуясь, поступают в блок 5 счета времени и блок 10 управления автоо.ператором.
Програ.ммный блок 3 посылает сигнал в регистр 7 задания позиций, а блок 4 реверсивного счета позиций - в регистр 8 счета позиций и фиксирует их. В исходном положении коды регистра 7 задания позиций и регистра 8 счета позиций совпадают, поэтому на выходе совпа.дений 9 появляется сигнал, который поступает в блок 10 ;утравления автооператором. Третий сигнал в .блок 10 поступает через некоторое время из блока 5 счета времени.
При со.впадении этих трех сигналов из блока управления автоонератором поступает сигнал на исполнительный механизм //, который разрешает вертикальное перемещение.
Если траверса автооператора находится внизу, то перемещение происходит вверх, а если вверху-то вниз (в исходно.м положении траверса азтооператора находится внизу). Та.ким образом, траверса автооператора перемещается вверх. При достижснин траверсой автооператора верхнего люложеиия исполнительный механизм И посылает сигнал в блок / датчиков перемещений. Сигнал из блока 1, преобразуясь в бло.ке 2 переработки информации, поступает в нрограммный блок 3, где нроисходит с.мепа команд, запрограммированная команда горизонтального пере.мещения (вперед или назад) записывается iB регистр команд 6, запрограммированная позиция останова - в регистре 7 задания позиций. Код регистров в блоке совпадений 9 не совпадает, а сигнал из блока 9 в блок 10 управления автоонератором исчезает. При отсутствии одного из грех сигналов вертикального перемещения на выходе блока управления автооператоро.м сигнал отсутствует. Перемещение в.верх .прекращается. Во время останова посылается нз блока 10 управления автооператором иМпульс сброса исходного состояния в блок 5 счета времени. Реле времени снова отсчитывает время.
В верхнем положении траверсы из регистра команд 6 посылается сигнал выбора направления горизонтального перемещения в блок 10 управления автоонераторо.м. Через некоторое время поступает второй сигнал .нз блока 5 счета времени в блок 10. При совнадении двух сигналов из регистра ко.манд 6 блока 5 счета .времени на .выходе бло.ка 10 появляется сигнал управления исполнительным механизмом //, разрешающий горизонтальное перемещение. . ........

| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДОАППАРАТ ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОРОМ НА ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 1973 |
|
SU407978A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| БЕСКОНТАКТНЫЙ КОМАНДОАППАРАТ | 1970 |
|
SU264504A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Многопроцессная линия гальванических покрытий | 1988 |
|
SU1585396A1 |
| Устройство для управления автооператором химико-гальванической линии | 1981 |
|
SU966667A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
