-Ч О 00 XI СХ СО
Изобретение относится к области автоматики, в частности, к системам управления перемещением.
Целью изобретения является упрощение системы (и, как следствие этого, повышение ее эксплуатационной надежности).
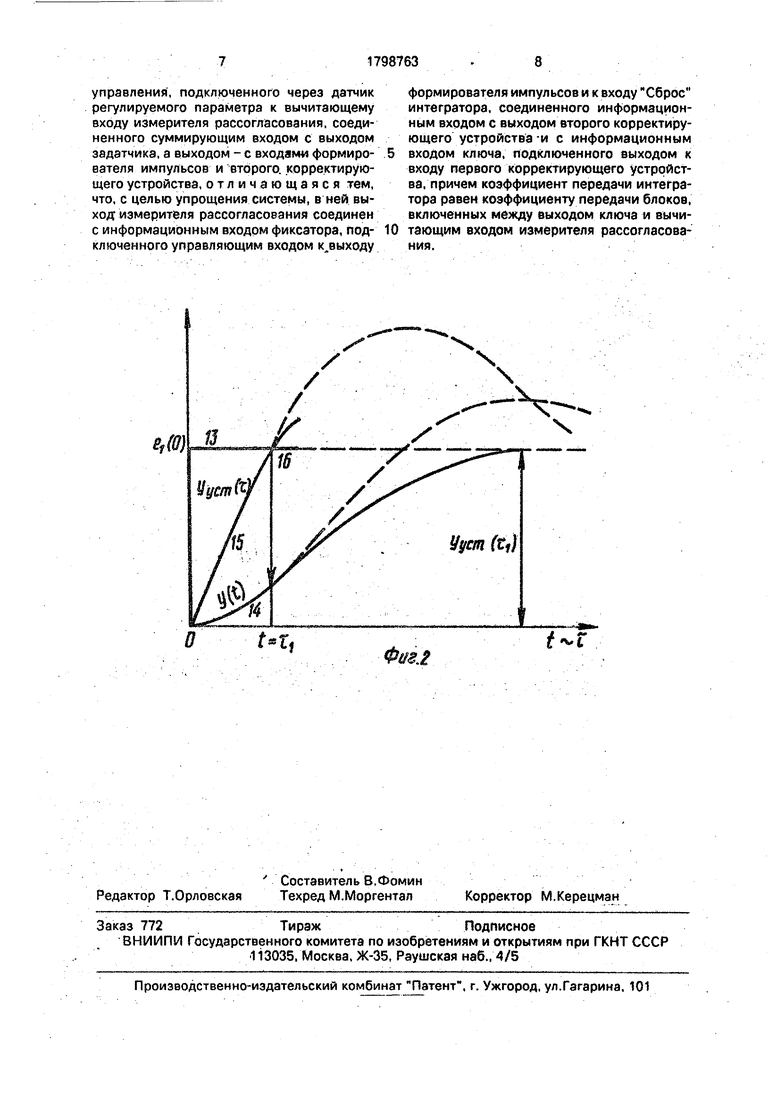
На фиг. 1 представлена блок-схема системы; на фиг.2 приведен типичный график изменения во времени сигналов в характерных точках системы.
Действие системы основано на следующих соотношениях. Пусть ступенчатое воздействие появляется на выходе задатчика и на суммирующем входе измерителя paccorj ласования замкнутой (т.е. при замкнутом ключе) системы при t.« О, а размыкание ключа в ходе соответствующего переходного процесса - при t т- порождает на выходе разомкнутой системы продолжение этого процесса в виде выбега, причем продолжительность разомкнутого состояния ключа достаточна для того, чтобы выбег успел практически завершиться. Тогда каждому значению длительности замкнутого состояния ключа г может быть поставлено в соответствие установившегося - после завершения выбега - значение ууст (т) выходной величины системы у (t). Пусть также ключ расположен, например, между выходом блока с передаточной функцией Gi{S), на вход которого с выхода измерителя рэс- согласованця поступает сигнал рассогласования ei (t), и входом блока с передаточной функцией G2(S), выход которого является выходом системы и соединен с вычитающим входом измерителя рассогласования. Указанные передаточные функции обычно, во- первых, представляют собой отношение полиномов от S, причем степень знаменателя не ниже степени числителя, во-вторых, содержит множители Di,D2, произведение которых есть добротность системы по скорости D, и, в-третьих, являются сомножите- лями, образующими передаточную функцию разомкнутой системы G (S).
Согласно теореме о конечном значении, величина ууст (t) определяется соотношением:
Ууст (г) - Нт у (t. г) llm SE2 (S) G2(S),
t - + со
где Е2 (S)- изображение по Лапласу сигнала 62 (t) на выходе ключа, замкнутого в течение времени т, отсчитываемого от момента начала отработки замкнутой системой единичного ступенчатого входного воздействия,
Согласно теореме о свертке в комплексной области (при t - 4- оо в силу однократности замыкания ключа) изображение Е г (S) может быть представлено через сумму выче- тов Gi (S) /S 1 + G (S) в полюсах, совпадающих с корнями Si характеристического уравнения замкнутой системы, следующим образом:
10
Gi(v)
Е2(3)Т|Рез(И1))х
15
X
1-exp{-r(s-v)J , v s-vГ
После подстановки Еа (S) и перехода к пределу - в предположении, что знамена- тель Gz (S) содержит множитель S - соотно- шение приобретает вид:
G1 (V) ч | х
;
yyCT(r)((v)3, IV ,|
хехр(у)1 -02.
Если представить последние сомножители у всех слагаемых в виде интегралов от exp (Sit) с верхним пределом т и затем сменить мес- тами операции суммирования и интегрирования, соотношение принимает вид: г п
Ууст (т) Da/ 2 Res о
5
0
5
0
5
Gi(v)
(v)l x exp ( si t) 1 d t
Da.. /1
V s| X
L-ife- f1 Gl()Л
L S S 1+G(S)jJ
где L - символ обратного преобразования Лапласа.
Это соотношение позволяет непрерывно - в силу эквивалентности t и т - и с упреждением вычислять ууст (т) в ходе переходного процесса в замкнутой системе, вызванного ступенчатым входным воздействием, посредством интегрирования сигнала ошибки на входе (или выходе) ключа с одновременным умножением результата интегрирования на коэффициент D2. .
В частном случае, когда вход ключа соединен непосредственно с выходом измерителя рассогласования (т.е. G i (S) 1, Оз D), зависимость Ууст (t) - как функция г- эквивалента увеличенной в D раз скоростной ошибке - как функция t - замкнутой системы.
В результате для того, чтобы выходная величина системы после размыкания ключа и завершения выбега оказалась в точности соответствующей величине входного воздействия, достаточно разомкнуть ключ {и систему в целом) в ходе переходного процесса в момент времени t ij, определяемый достижением равенства между вычисляемой величиной ууст (t) и начальным значением рассогласования ei(0). Если к тому же выбег имеет монотонный характер, переходный процесс может быть избавлен от колебательности (перерегулирования) при сохранении быстродействия.
Следящая система, блок-схема которой приведена на фиг,1, содержит последовательно соединенные задатчик 1, измеритель рассогласования 2, второе корректирующее устройство 3 (например, предварительный усилитель), управляемый ключ 4, первое корректирующее устройство 5 (например, усилитель мощности), исполнительный механизм 6, объект управления 7 и датчик регулируемого параметра 8, выход которого соединен с вычитающим вхо- дом измерителя рассогласования 2. Выход измерителя рассогласования 2 соединен также с входом формирователя импульсов 9 и с информационным входом фиксатора нулевого порядка 10. Выход формирователя 9 соединен с управляющим входом фиксатора и со сбросовым входом интегратора 11, информационный вход которого соединен с информационным входом ключа 4. Выходы фиксатора 10 и интегратора 11 соединены соответственно с опорным и информационным входами компаратора 12, выход которого соединен с управляющим входом ключа 4. Коэффициент передачи интегратора 11 раеен коэффициенту передачи сово- хупности блоков 5,6,7 и 8. Разбиение усилительной части системы на устройства 3 и 5 и, следовательно, их структура и параметры в известной степени произвольны. так как определяются схемотехническим и конструкторским удобствами введения ключа 4. В результате ключ 4 может быть установлен в любой точке системы, начиная от выхода измерителя рассогласования 2 и кончая входом исполнительного механизма 6, с соответствующей корректировкой коэффициента передачи интегратора 11.
Система работает следующим образом.
При появлении ступенчатого сигнала на выходе задатчика 1 соответствующий сиг- нал появляется на выходе измерителя рассогласования 2. Фронт этого сигнала преобразуется формирователем 9 в импульсную команду, обеспечивающую запоминание на выходе фиксатора 10 начального значения сигнала рассогласования ei (О) (прямая 13 на фиг,2) и сброс (обнуление) выходного сигнала интегратора 11. Одновременно ключ 4 - если он не замкнут после отработки предыдущего воздействия - переключается в замкнутое состояние сигналом, возникающим на выходе компаратора 12 вследствие изменения сигналов на его входах. Система оказывается замкнутой и начинает отработку входного воздействия (кривая 14 на фиг.2). Одновременно с этим на выходе интегратора 11 формируется нарастающий сигнал (кривая 15 на фиг.2), значение которого при каждом t т О соответствует величине ууст (г). Как только сигнал на выходе интегратора 11 сравняется - при t Г - с сигналом на выходе фиксатора 10 (точка 16 пересечения прямой 13 и кривой 15 на фиг.2), на выходе компаратора 12 формируется сигнал, изменяющий состояние ключа 4 на противоположное/Ключ 4 (и система в целом) размыкается, и последующее - при t rt - изменение выходной величины системы (кривая 14 на фиг.2) происходит в соответствии с состоянием системы в момент размыкания ключа и со свойствами разомкнутой системы, завершаясь при установившемся значений уус1 (г), равное ei(0).
Размыкание ключа 4 может быть осуществлено и в последующие моменты установления равенства сигналов на выходах фиксатора 10 и интегратора 11.
При непрерывном характере изменения входного воздействия его ступенчатая аппроксимация, необходимая для функционирования системы, может быть обеспечена посредством установки на суммирующем входе измерителя рассогласования 2 управляемого фиксатора нулевого порядка.
Таким образом, улучшение динамических характеристик системы достигается при существенном упрощении состава системы, связей между ее элементами и алгоритма работы, обеспечивающего дополнительно и адаптивность работы системы по отношению к изменению ее параметров и условий работы.
Формула изобретения Следящая система, содержащая компаратор, соединенный опорным входом с выходом фиксатора, информационным входом - с выходом интегратора, а выходом - с управляющим входом ключа, первое корректирующее устройство, подключенное выходом к входу исполнительного механизма, соединенного выходом с входом объекта
управления, подключенного через датчик регулируемого параметра к вычитающему входу измерителя рассогласования, соединенного суммирующим входом с выходом задатчика, а выходом - с входами формиро- вателя импульсов и второго, корректирующего устройства, отличающаяся тем, что, с целью упрощения системы, в ней выход измерителя рассогласования соединен с информационным входом фиксатора, под- ключенного управляющим входом К.ВЫХОДУ
формирователя импульсов и к входу Сброс интегратора, соединенного информационным входом с выходом второго корректирующего устройства -и с информационным входом ключа, подключенного выходом к входу первого корректирующего устройства, причем коэффициент передачи интегратора равен коэффициенту передачи блоков, включенных между выходом ключа и вычитающим входом измерителя рассогласования.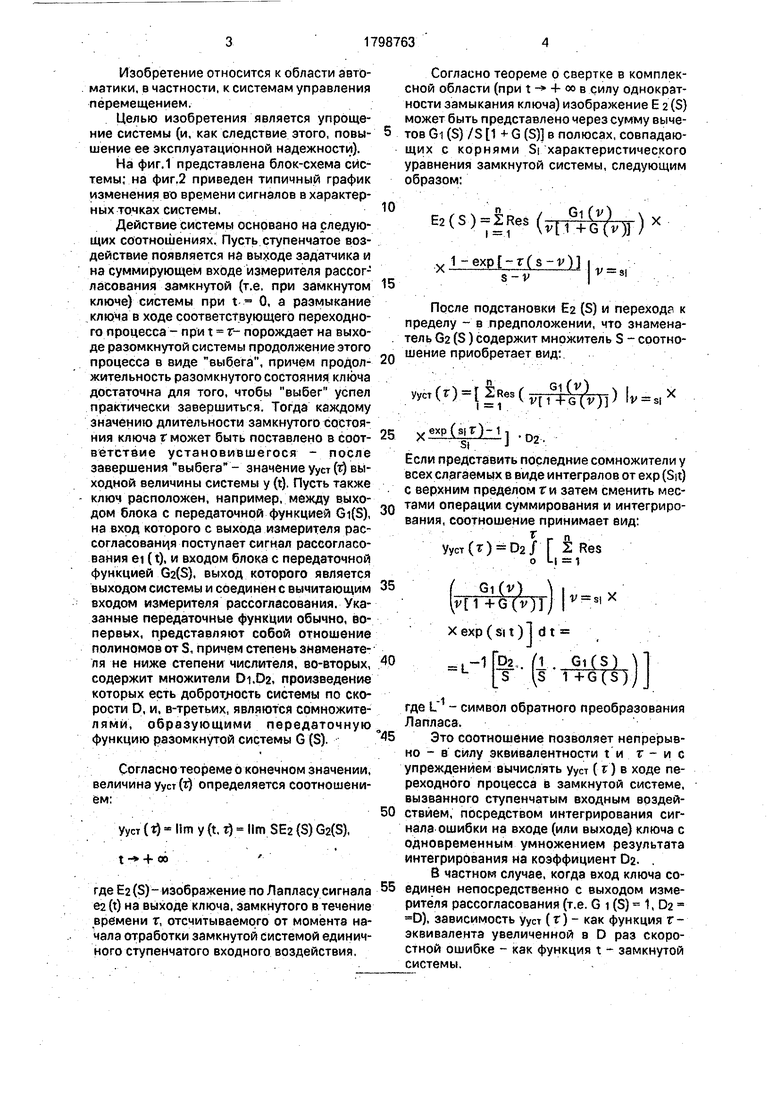
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1427327A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
Изобретение относится к области автоматики и может быть использовано в станках с программным управлением и роботах. Целью изобретения является упрощение системы. Указанная цель достигается благодаря автоматическому управлению ключом, изменяющим структуру системы в ходе переходного процесса, вызванного ступенчатым входным воздействием, таким образом, что начальная часть переходного процесса соответствует работе системы в замкнутом состоянии, а завершающая часть (выбег }- работе системы в разомкнутом состоянии. Управление ключом осуществляется с помощью фиксатора, интегратора и компаратора, подключенных к внутренним точкам системы и соединенных таким образом, что в результате обеспечиваются как соответствие между установившейся - после завершения выбега - выходной величиной системы и величиной входного воздействия (с одновременным снижением колебатель- . ности переходного процесса), так и адаптивность работы системы по отношению к изменению ее параметров и услоовий работы. Система содержит задатчик 1, измеритель рассогласования 2. второе корректирующее устройствоЗ, ключ 4, первое корректирующее устройство 5, исполнительный механизм 6, обьект управления 7. датчик регулируемого параметра 8, формирователь импульсов 9, фиксатор нулевого порядка 10. интегратор 11, компаратор 12. 2 ил. ЈЛ
| Э | |||
| Джури | |||
| Импульсные системы автоматического регулирования, М | |||
| Физматгиз, 1963, с | |||
| Приспособление для обрезывания караваев теста | 1921 |
|
SU317A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
