(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1975 |
|
SU557349A1 |
| Система автоматического управления | 1976 |
|
SU646305A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
1
Предлагаемое устройство относится к области автоматического управления, может быть использовано в тех областях техники, где требуется произвести операции поиска и удержания значения некоторой функции от регулируемой координаты в заданной области и является усовершенствованием известной системы.
В основном изобретении описана система автоматического управления, предназначенная для целенаправленного поиска и удержания значения заранее заданной функции от регулируемого параметра - функции цели в определенной области 1.
Недостатком известной системы является то, что в ряде случаев необходимое высокое быстродействие не может быть достигнуто по условиям устойчивости системы.
Целью настоящего изобретения является повышение устойчивости системы. Это достигается тем, что в системе установлен усилитель, а выход ключа соединен со входом интегратора через усилитель, управляющие входы которого соединены с выходами соответствующих измерителей рассогласования.
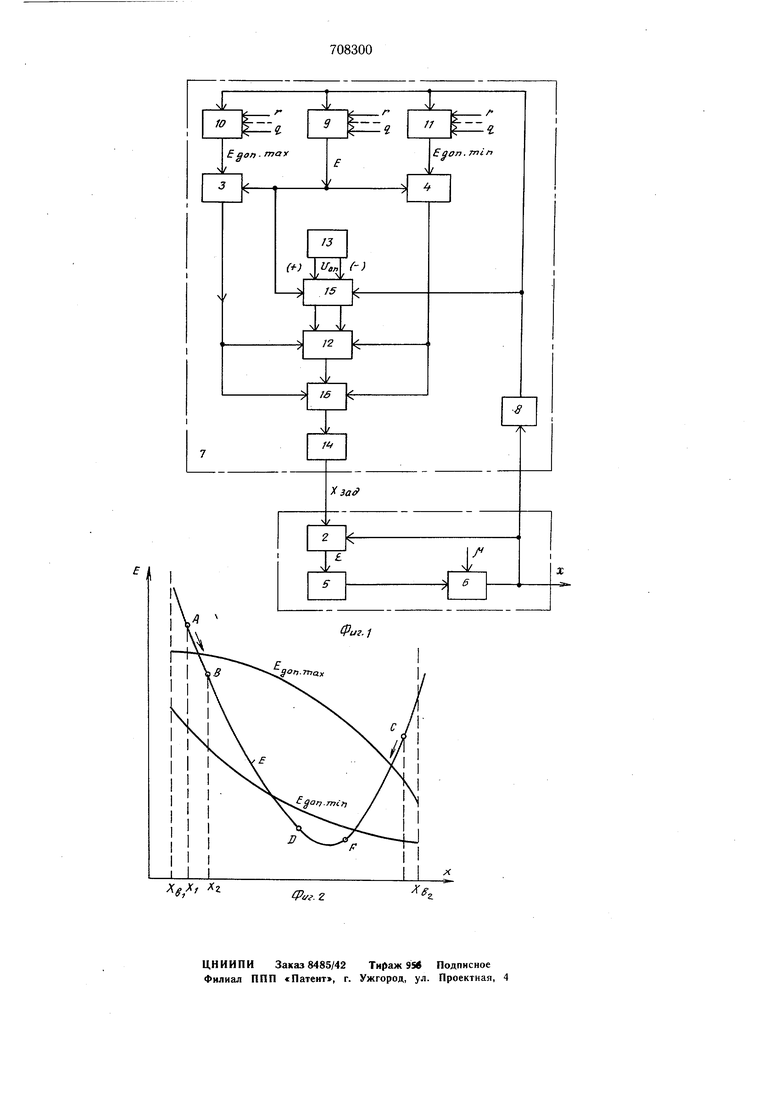
Структурная схема системы представлена на фиг. Р,.-пример графиков функции цепи приведен на фиг. 2, где приняты следующие обозначения: основной контур 1 регулирования, первый, второй и третий измерители 2, 3, 4 рассогласования, формирова тель 5 сигнала управления, объект 6 управления, контур 7 подстройки, датчик 8 регулируемой величины, вычислитель 9 функции цели, вычислители 10, 11 максимального и
минимального допустимых значений функции цели, ключ 12, источник 13 опорного сигнала, интегратор 14, сигнум-реле 15, усилитель 16, X - регулируемая величина, 2 - сигнал рассогласования, Е - функция цели, ЕдошмлкеИ допустимые максимальное и минимальное значения функции цели. UOH - опорный сигнал, X - сигнал задания,- внешние возмущения, q...r - внешние параметры.
Алгоритм работы системы описывается
следующими соотношениями: х W(p)Xp.,,
Е Еи О
гдеШ(р)- передаточная функция основного контура 1 регулирования, выбранная
так, чюбы 2 Ху - X min, Ки - безразмерный коэффициент, определяемый конструкцией интегратора 14, Ку- коэффициент передачи усилителя 16.
Система работает следующим образом. Пусть функция цели Е(х, q...r) имеет вид, показанный на фиг. 2, а регулируемая величина X в некоторый момент оказалась равной X (точка А на фиг. 2), а значение функции цели в этой точке больше, чем допустимое максимальное значение E,(x,q...r), т. е. функции цели находятся вне области допустимых значений. Тогда на выходе измерителя 3 рассогласования появится сигнал, а на выходе измерителя 4 рассогласования сигнал отсутствует. Измерители 3 и 4 рассогласования выполнены как вычитатели односторонней проводимости. Ключ 12 через усилитель 16 с переменным коэффициентом передачи подает на вход интегратора 14 положительный сигнал от источника 13 опорного сигнала. Сигнал задания Xjty, вырабатываемый интегратором 14, нецрерывно растет. На выходе измерителя 2 рассогласования, а следовательно, и на входе формирователя 5 сигнала управления, появляется соответствующий сигнал. Формирователь 5 сигнала управления вырабатывает такой сигнал, чтобы значение регулируемой величины X также росло, т. е. чтобы рассогласование 2 Хщ- X было минимальным. Рабочая точка на кривой Е (фиг. 2) перемещается вправо, пока не войдет в область допустимых значений. В этой области (точка В на фиг. 2) Едоп.мшн (xe,q...r) Е)хг,я...г) ЕАОП.МАК(Х..Ч---Г) , следовательно, сигналы на выходах измерителей 3 и 4 рассогласования, а значит и на входе интегратора 14 будут отсутствовать. Сигнал на выходе интегратора 14 перестанет изменяться и формирователь 5 сигнала управления будет удерживать регулируемую величину х объекта 6 управления в заданной области. Система будет функционировать аналогично, если значение E(x,q...r) окажется меньше Едоя,мин (x,q...r) с той разницей, что ключ 12 подает
сигнал с измерителя 4 рассогласования на вход интегратора 14 и сигнал на входе интегратора 14 отрицательный. Таким образом, система кратчайшим путем переводит объект 6 управления из точек С, Д, F на фиг. 2 в такое состояние, при котором функция цели будет находиться в заданной области.
Скорость движения будет определяться скоростью изменения сигнала задания и инерционностью контура 1 регулирования, определяемой в первую очередь инерционностью объекта 6 управления. Величины опорного сигнала Uon И коэффициента Кн всегда могут быть выбраны так, чтобы быстроде.йствие сигнала при данном контуре 1 регулирования было максимально возможным. Для обеспечения при этом устойчивости системы скорость изменения Xjaj при приближении значения Е и . несколько уменьшается с помощью усилителя 16 путем изменения коэффициента передачи Ку.
Таким образом, использование в системе нового элемента - усилителя с переменным коэффициентом передачи - обеспечивает устойчивость сигнала при максимально достижимой для данного объекта управления скорости поиска.
Формула изобретения
Система автоматического управления по авторскому свидетельству № 646305, отличающаяся тем, что, с целью повышения устойчивости системы в ней установлен усилитель, а выход ключа соединен со входом интегратора через усилитель, управляющие входы которого соединены с выходами соответствующих измерителей рассогласования.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 646305 по заявке № 2431571/18-24, кл. G 05 В 13/02, от 14 декабря 1976 (прототип) .
