УСТРОЙСТВО для КОНТРОЛЯ ПЕРЕКОСА ОПОР
(54) МОСТОВОГО КРАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Устройство для контроля положения опоры крана | 1985 |
|
SU1255550A1 |
| Устройство для ограничения перекоса опор крана мостового типа | 1983 |
|
SU1209576A1 |
| СПОСОБ ОЦЕНКИ МАССЫ ГРУЗА, ПОДНИМАЕМОГО И/ИЛИ ПЕРЕМЕЩАЕМОГО ПОДЪЕМНО-ТРАНСПОРТНЫМ УСТРОЙСТВОМ | 2016 |
|
RU2626791C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Стабилизирующее устройство ходовой тележки мостового крана | 1987 |
|
SU1588693A1 |

Изобретение относится к подъемно-транспортному машиностроению, в частности к конструированию устройства для контроля перекоса опор мостового крана.
Известно устройство для контроля перекоса опор мостового крана, содержащее датчики, установленные у опор крана и связанные с регистрирующим устройством 1. Однако известное устройство громоздко и Имеет низкую надежность в работе.
Наиболее близким из известных решений, является устройство для контроля перекоса опор мостового крана, содержащее датчики, установленные у опор крана и взаимодействующие с направляющими 2.
Однако известное устройство не обеспечивает достаточной точности определения величины перекоса и смещения моста крана.
Цель изобретения - повышение точности определения величины перекоса и смещения люста крана.
Для этого каждый из датчиков содержит корпус с индуктивными преобразователями двухстороннего действия, содержащими обмотки, подвижный сердечник со щтоком и роликом, миллиамперметры смещения и перекоса моста крана, при этом обмотки каждого индуктивного преобразователя нави1ы в пропивоположные CTopofibi, причем одни кош№1 обмоток электрически соединены с источником тока, а другие концы обмоток подключены через выпрямите л ьньп мостик к обмоткам соседнего инд ктивного преобразователя, в цепи которых параллельно включен миллиамперметр смещения, а последот -.тельно - млллиамперметр перекоса, при этом ролик подаижпого сердечника взаимодействует с нaпpaвляluщи u.
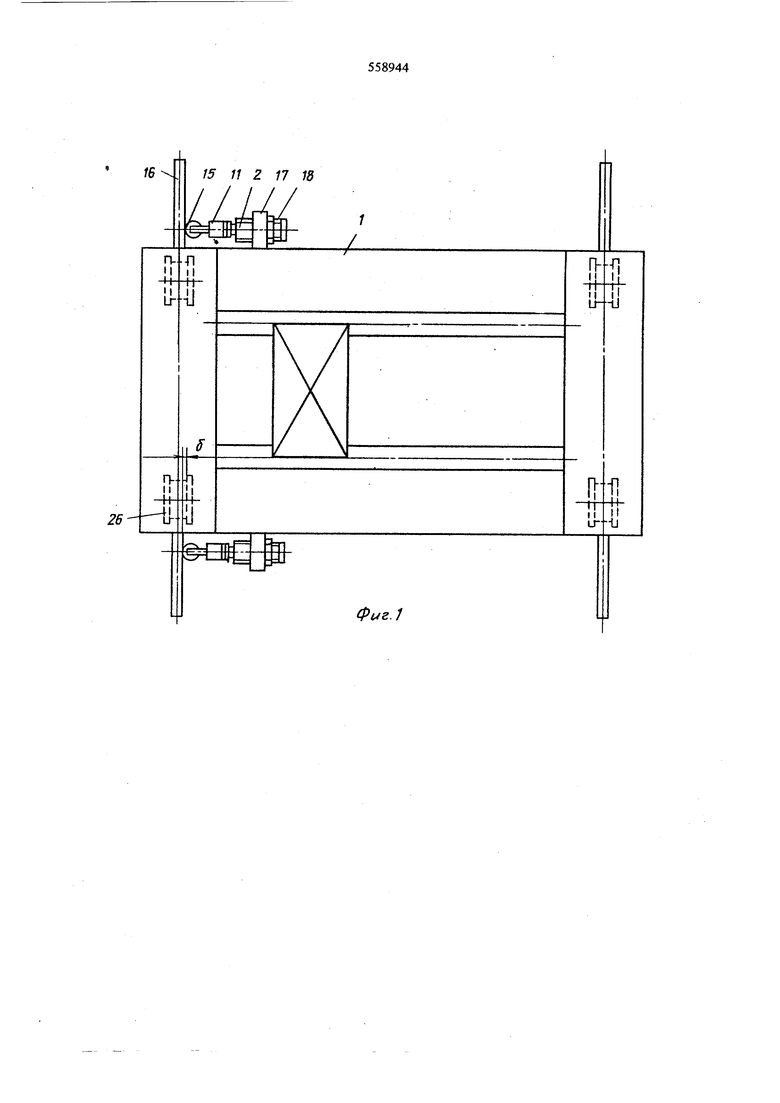
На фиг. 1 изображена схема расположения датч 1ков на кране; на фиг. 2 - датчики в схеме их включения.
Устройство содержит мосговой кран . на котором ус1ановлены дпшики 2, включающие в себя корпус с наружной резьбой 3, в которыГ вставляется катущка 4 с двум.ч обмоткамл 5, навитыми в противоположные стороны. Катушка 4 с наружной сторопы закрьпа крышкой 6. Внутри кагушки 4 перемещается сердсашк 7 так, что в среднем поло-/келин он является общим для леиой н правой обмоток 5. Сердечник 7 навинчен па шток S из ангимагнитного материала, который соединен с металлическим штоком 9, подпружиненным с номощью пружины 10. Шток 8 проходит внутри головки 11 с пазом йг, которая навинчивается на корпус с наружной резьбой 3 и фиксируется гайками 12. Ход сердечника 7 ограничивается штифтом 13, расположенным внутри паза головкц 11. На конце штока 9 с помощью пальца 14 крепится ролик 15, контактирующий с головкой направляющей 16. Корпус с наружной резьбой 3 устанавливается в кронштейне крепления к крану 17 и фиксируется контргайкой 18.1,Да1Чики 2 включены в электрическую схему, состоящую из трансформатора 9 выпрямительных мостиков 20, сопротивлений 21, конденсаторов 22 и дросселей 23. Для визуального наблюдения величины смещения крана без перекоса служит миллиамперметр 24, включенный в схему одного датчика. Для наблюдения угла перекоса со смещением крана служит миллиамперметр 25. Мостовой кран установлен на ходовых колесах 26.
Устройство работает следующим образом.
Датчик питается переменным током (напряжением) от трансформатора 19. Предварительно производится таррировка датчиков, которая осуществляется при помощи набора мерных прокладок, помещаемых между роликом 15 и направляющей 16. Датчики 2 крепятся к крану 1 так, чтобы положение сердечников 7, соответствовало зазорам б между ребордами ходовых колес 26 и направляющей 16. При равенстве зазоров сердечник 7 находится в среднем положении катущки 4.
При движе ши крана происходит изменение зазоров между ребордами колес 26 и направляющими 16, а следовательно, и перемещение штока 9, связанного с сердечником 7. При смещении сердечника 7 нарушается равенство индуктивных сопротнвлений катушек 4, появляется разбаланс схемы и через миллиамперметры 24, 25 начинает протекать выпрямленный ток.
При смещении крана без перекоса сердечники 7 бу.цут перемещаться на одинаковую величину, при этом миллиамперметр 25, дифференцирующий сигналы с обоих датчиков, будет показывать нуль. Смещение крана определяется по показанию миллиамперметра 24, подключенного в цепь одного датчика.
При смещении крана с перекосом на миллиамперметр 25 поступает сигнал рассогласования, равный разности тока в обмотках 5 катушек 4.
При пробуксовке ведущего колеса, перекосе колес или других обстоятельствах кран перекашивается с поворотом вокруг мгновенного центра вращения. Показание миллиамперметра 20 является функцией смещения сердечников. Шкалы миллиамперметров 19, 20 градуируются в соответствии с максимальными углами перекоса для всех рассмотренных случаев. При необходимости записи углов перекоса вместо миллиамперметров включается осциллограф.
Формула изобретения
Устройство для контроля перекоса опор мостового крана, содержащее датчики, установленные у опор крана и взаимодействующие с направляющими, отличающееся тем, что, с целью повышения точности определения величины перекоса и смещения моста крана, кажлд ш из датчиков содержит корпус с индуктивными преобразователями двухстороннего действия, содержащими обмотки, подвижный сердечник со штоком и роликом, миллиамперметры смещения и перекоса моста крана, при этом обмотки каждого индуктивного преобразователя навиты в противоположные стороны, причем одни концы обмоток электрически соединены с источником тока, а другие концы обмоток подключены через выпрямительный мостик к обмоткам соседнего индуктивного преобразователя, в цепи которых параллельно включен миллиамперметр смещения, а последовательно - миллиамперметр перекоса, при этом ролик подвижного сердечника взаимодействует с направляющими.
Источники информации, принятые во внимание при экспертизе:
15 11 2 17 18
Л
П I
Lr
Пh-nIj
I i
LT-Ll
ПII
26
ч 11
ii
LT
Xi
Iff
.2
