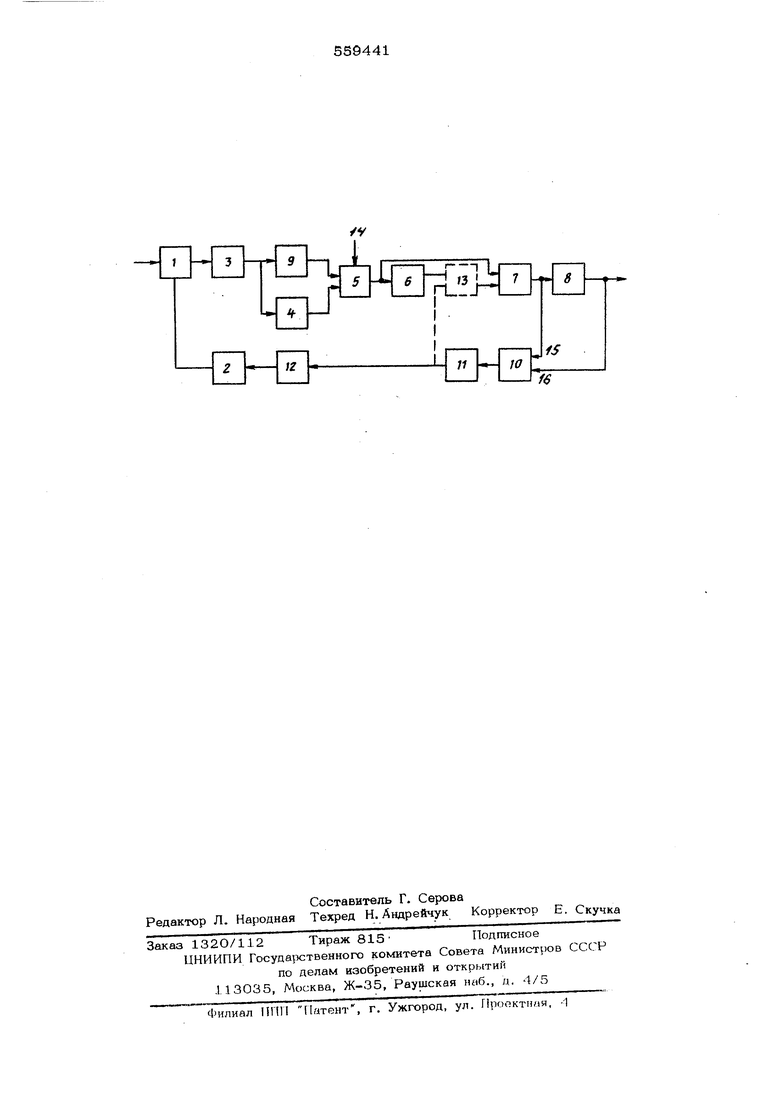
выход вьгчитателя 7 подключен к одному из входов дискриминатора 10, другой вход коаюрого подключен к выходу дептфратора единичных элементов данных 8, а выход преобразователя 12 сигнала частотного
рассргласования к управл5цощему входу опорного генератора 2. Между блоком памяти фазы 6 и входом вычитателя 7 включен корректор фазы 13.
Устройство работает следующим образом, Принимаемый сигнал после преобразования в смесителе 1 подвергается жесткому ограничению в ограничителе 3, после чего, с помощью дифференцирования в выделителе
фронтов 4 формируются импульсы j pOHTOB
несущей, соответствующие моментам перехода через нуль. Кроме того, в синзфонизаторе 9 путем анализа структуры принимаемого сигнала формируются импульсы опроса с периодом, равным длительности единичного изатервала. При регенерации данных методом стробирования :импульс опроса располагается в середине единичного элемента.
В измерителе фазы 5. из эталонного сиг нала, поступающего на вход 14, формируется опорный сигнал частоты f и с помощью эталонного сигнала измеряется задержка импульсов фронта несущей относительно опорных имгогльсов. При регенерации данных методом стробирования внутри единичного элемента измеряется задержка только одного импульса фронта, ближайшего после импульса опроса.
При интегральном методе регенерации данных выносится решение о фазе принима- емого сигнала на основе измерения задержек всех импульсов фронтов несушей внутри единичного элемента. Число, характеризующее текущее значение измеренной фазы, 07 правляется на хранение в блок памяти феизы 6. При этом предыдущее значение измеренной фазы fri выводится из блока памяти фазы 6 на вычитатель 7. В вычитателе 7 находится разность предьщущего и текущего |значения фазы fp f-f, Ч.
В дешифраторе единичных элементов данных 8 определяется наивероятнейщий вариант сдвига фаз соседних элементов на передаче Ч . Согласно найденного значения Ц на выходе дешифратора единичных элементов данных 8 вырабатывается сигнал данных, являющийся конечным результатом обработ ки принимаемого сигнала демодулятором.
В дискриминаторе 10 определяется отклонение ф от измеренной разности фаз не- сущего колебания соседних элементов , поступающей на дискриминатор 10 по цепи 15, от наивероятнейщего номинально1Х1 значения этой разности фаз f поступающей на дискриминатор 1О по цепи 10.
В дальнейшем отклонение фаз V подвергается усреднению с помощью усреднителя 11, сигнал с выхода которого управляет частотой опорного генератора 2, определяющего значение частоты сигнала Чп на выходе смесителя 1. В зависимости от метода, по которому работает усреднитель 11, применяется тот или иной преобразователь 12 сигнала частотного рассогласования.
Другой вариант использования сигнала с выхода усреднителя 11 для компенсации нестабильности базируется на применении корректора фаз 13. При этом смеситель 1 выполняет лищь функцию смещения частоты ,прищ1маемого сигнала до значения, при котором удобна реализация цифрового метода демодуляции. Тогда преобразователь 12 отсутствует, а опорный генератор 2 настраивается на определенную частоту.
Предложенное устройство обеспечивает демодуляцию фазоманипулированного сигнала с повыщеннор помехоустойчивостью при нестабильности частоты принимаемого колебания.
Формула изобретения
Устройство цифровой некогерентной демодуляции сигнала с относительной фазовой манипуляцией, содержащее последовательно соединенные смеситель, другой вход которого соединен с выходом опорного генератора ограничитель, вьщелитель фронтов, измеритель фазы, блок памяти фазы, вычитатель и дешифратор единичных элементов данных, причем выход ограничителя через синхронизатор подключен к управляющему входу измерителя фазы, выход которого подсоединён к другому входу вычитателя, отличающееся тем, что, с целью повышения помехоустойчивости демодуляции при нестабильности частоты несущей, в него введены последовательно соединенные дискриминатор усреднитель и преобразователь сигнала частотного рассогласования, при этом выход , вьР1Итателя подключен к одному из входов дискриминатора, другой вход которого подсоединен к выходу дешифратора единичных элементов данных, а выход преобразователя сигнала частотного рассогласования подклю чен к управляющему входу опорного генератора.
2. Устройство по п. 1,отлича ю- щ е е с я тем, что между выходом блока памяти фазы и входом вычитателя включен корректор фазы, другой вход которого соединен с выходом усреднителя.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство № .353344, М., Кп И 03 К 13/20, 1970 (протопш).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ФАЗОВОЙ АВТОПОДСТРОЙКИ | 1973 |
|
SU375772A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Цифровой демодулятор сигналов фазоразностной модуляции первого и второго порядка | 1991 |
|
SU1838884A3 |
| Цифровой демодулятор сигнала с относительной фазовой манипуляцией | 1974 |
|
SU513523A1 |
| Частотный детектор | 1982 |
|
SU1137563A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| Кодек квазициклического кода | 1986 |
|
SU1349010A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |