1
Изобретение относится к области автоматического регулирования и может найти применение в следящих системах, требующих повыщенных показателей качества переходного процесса и отсутствия ошибок от действия внешних механических нагрузок.
Известны системы, в том числе и переменной структуры, в которых для обеспечения высокой точности слежения при действии внешних возмущений используются блоки коррекции различных типов 1, 2.
Известно также наиболее близкое к изобретению по техническому решению управляющее устройство, содержащее пороговый элемент, первый вход которого соединен с входом устройства, а второй вход - с однпм из входов второго ключа и через корректирующее устройство с входом усилителя, причем одним из входов суммирующего устройства подключен к выходу второго ключа, на второй вход второго ключа поступает сигнал с выхода объекта регулирования 3.
Однако при наличии внешних механических нагрузок в такой системе может произойти срыв скользящего режима, что приводит к увеличению ощнбок отработки входного воздействия.
Цель изобретения - повыщение точности блока при действии внешних механических нагрузок с сохранением высокого быстродействия и высокого качества переходного процесса.
Это достигается введением двух синхронных детекторов п формирователя знака управляющей функции, вход которого соединен с дополнительным входом блока коррекции, а выход подключен к первому входу второго синхронного детектора, вторым в.ходом связанного с выходом первого синхронного детектора, первый п второй .входы которого соединены соответственно с входом и выходом порогового элемента.
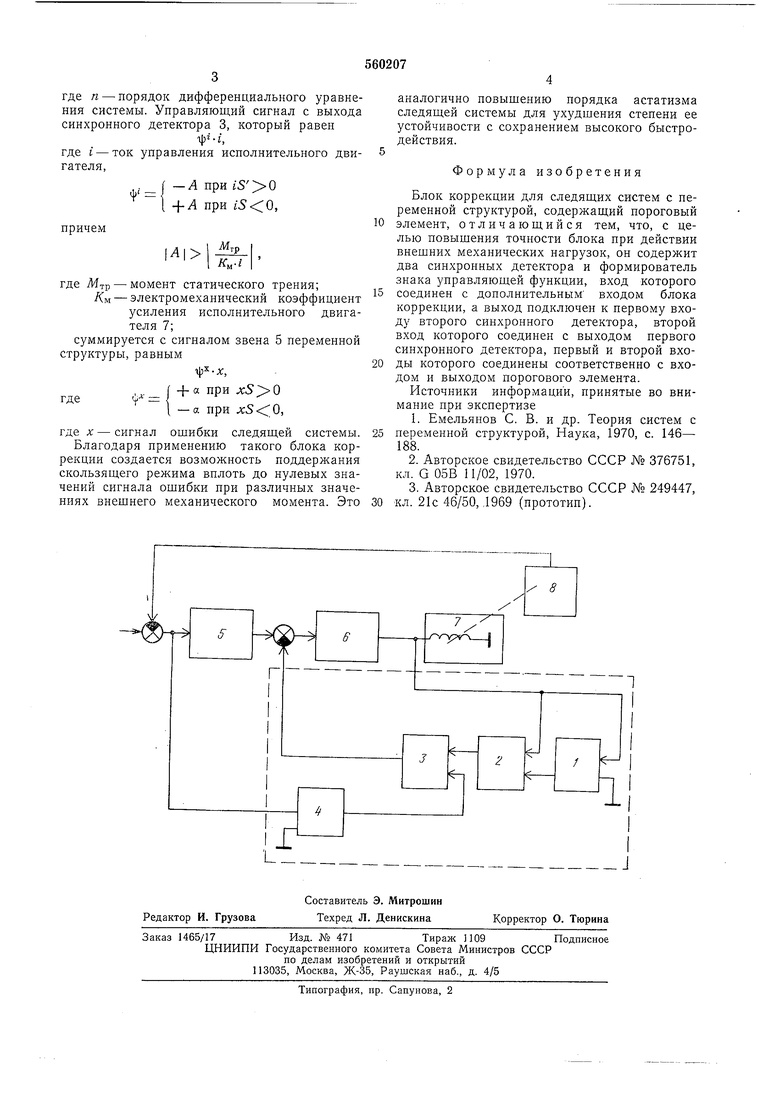
На чертеже представлена схема, поясняющая работу устройства.
Она содержит пороговый элемент 1, синхронные детекторы 2 и 3, формирователь 4 знака управляющей функции, звено 5 переменной структуры, усилитель 6 мощности, исполнительный двигатель 7, датчик 8 обратной
связи.
С помощью порогового элемента 1 п первого синхронного детектора 2 формируется модуль снгнала тока управления исполнительного двигателя Itj. На втором синхронном
детекторе 3 реализуется операция умнолсения i SignS, где 5 может формироваться или интегрированием сигнала управления со схемы переменной структуры, или суммированием сигнала ошибки с производными от сигнала ошибки вплоть до (п-1)-го порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU642676A1 |
| Следящая система | 1980 |
|
SU1003016A2 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Измеритель частоты гармоническогоСигНАлА | 1979 |
|
SU813289A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ПЕРЕМЕЩАЕМОМ ВОЛОКНИСТОМ МАТЕРИАЛЕ | 2013 |
|
RU2545495C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ЧАСТИЦ В ПЕРЕМЕЩАЕМОМ ВОЛОКНИСТОМ МАТЕРИАЛЕ | 2013 |
|
RU2532805C1 |
