тельной подачи интегральных схем на контактные колодки, двух контактных колодок 3, механизма перемещения кассет 4, отсекателя 5, блока управления 6.
Механизм последовательной подачи интегральных схем состоит из основания 7 с шариковымн направляющими 8, в которых возвратно-поступательно двигаются нолзуны 9 и 10 с шарикоподшипниками 11. На ползуне 9 закреплены кронштейны 12 и 13, образующие первый по ходу движения прибора подвижный двухъярусный участок направляющей, а на ползуне 10 закреплены кронштейны 14 и 15, образующие второй подвижный двухъярусный участок направляющей.
Механический привод включает электродвигатель 16, редуктор 17, ценную передачу 18, ведущий вал 19 с зубчатым цилиндрическим колесом 20. Зубчатые колеса 21 и 22, связанные с ведущим валом, закреплены на кулачковых валах 23 и 24, несущих кулачки 25 и 26, 27 и 28. По кулачкам 27 и 28 обкатываются ролики 29 и 30, закрепленные на рычагах 31 и 32, несущих контакты 33 и 34. Неподвижный участок направляющей для скольл :ения приборов обозначен позицией 35. Пружина 36 постоянно поджимает подшипники 11 ползунов 9 и 10 к кулачкам 25 и 26.
В механизме 2 носледовательной подачи интегральных схем установлены фотодатчики 37 и 38 для счета измеряемых и годных приборов. Контактная группа 39 и кулачки 40 служат для обеспечения своевременного перемещения кассет на загрузке приборов и разгрузке годных приборов.
Ролики 29, рычаги 31 и контакты 33, а также ролики 30, рычаги 32 и контакты 34 конструктивно выполнены, как контактные колодки 3.
Автомат работает следующим образом.
Движение с электродвигателем 16 через редуктор 17 и цепную передачу 18 передается на вал 19. С вала 19 через зубчатые колеса 20, 22 и 21 движение передается на валы 23 и 24, несущие на себе дисковые кулачки 25 и 26 и торцовые кулачки 27 и 28. Дисковые кулачки 25 и 26 передают движение на ползуны 9 и 10 механизма последовательной -подачи приборов через шарикоподшипники 11. Торцовые кулачки 27 и 28 через ролики 29 и 30 передают движение на рычаги 31 и 32 контактных колодок 3, а контакты 33 и 34, закрепленные на рычагах 31 и 32, обеспечивают коммутацию интегральных схем с измерительным оборудованием.
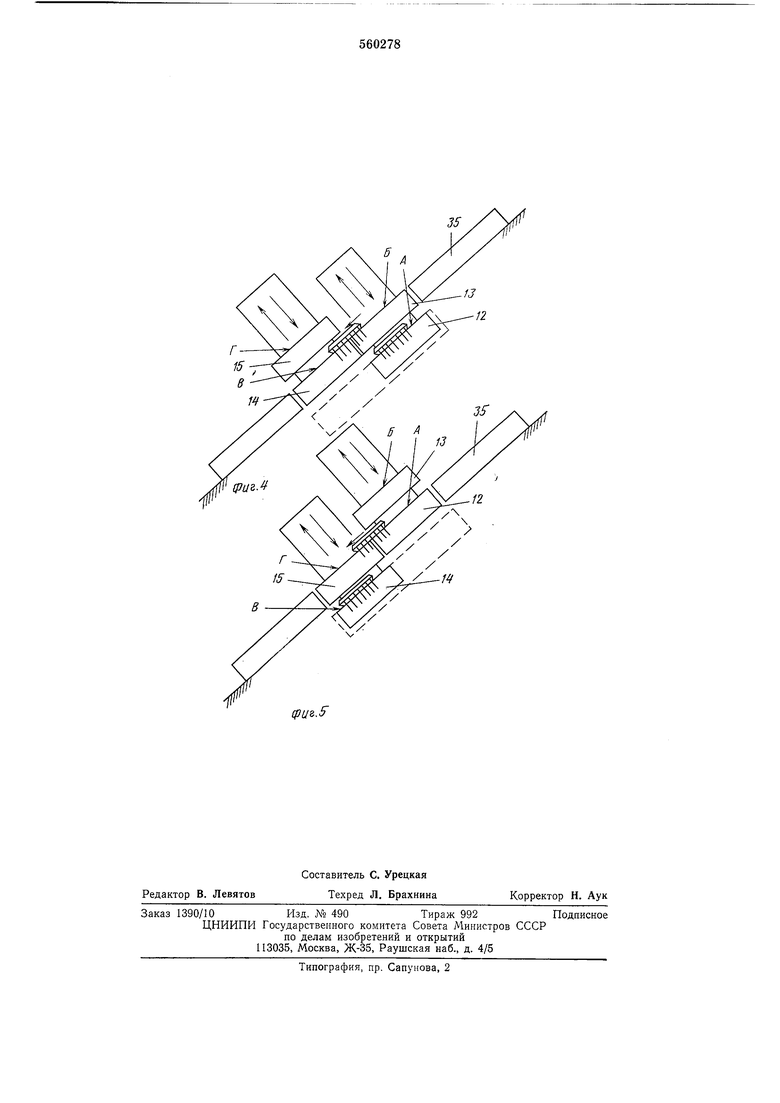
Измеряемые приборы в кассетах подаются в верхний механизм перемещения кассет 4 и но направляющей 35 скользят до отсекателя 5. Отсекатель 5 поштучно выдает по одному прибору. Приборы дальше по направляющей 35 поступают в первый подвижный участок на плоскость А кронштейна 12. Ползун 9 под действием пружины 36 подает прибор в зону контактных колодок, а плоскость Б кронштейна 13 оказывается на одном уровне с плоскостью
скольжения направляюшей 35. Следующий прибор, выданный отсекателем 5, по нанравляющей 35 и по плоскости Б поступает на плоскость В кронштейна 14 второго подвижного участка. Ползун 10 двигается вниз одновременно с движением ползуна 9 вверх и подается прибор в зону контактных колодок. В момент измерения второго прибора плоскость А кронштейна 12 и плоскость Гкронштейна 15 совпадают, и замеренный первый прибор с плоскости А скользит вниз по плоскости Г и дальше по направляющей в кассету, установленную в нижнем механизме перемещения кассет 4.
Фотодатчики 37 и 38 считают количество поступивших и годных приборов и подают сигнал в блок управления 6. Блок управления 6 через контактную группу 39 и кулачки 40 задает необходимый режим перемещения кассет на загрузке и выгрузке приборов механизмами перемещения кассет 4.
В крайнем нижнем положении ползуна 9 и в крайнем верхнем положении ползуна 10 приборы с направляющей 35 по плоскости Б загружаются на плоскость В ползуна 10, а замеренный прибор с плоскости В уходит по иаправляющей в кассету.
В следующий цикл, когда ползун 9 находится в крайнем верхнем положении, а ползун 10-в крайнем нижнем положении, измеряемые приборы поступают с направляющей 35 на плоскость А, а замеренные приборы с плоскости А по плоскости Г ползуна 10 уходят в кассету нижнего узла перемещения кассет. В отличие от указанного выше оборудования, где загрузка, измерение и разгрузка прибора производятся последовательно на одной позиции измерения, в предложенном устройстве время на загрузку и разгрузку прибора на одной позиции совпадает с временем измерения прибора на другой позиции, поэтому подключенное к автомату измерительное оборудование работает без перерывов на механические онерации.
Формула изобретения
Автомат коммутации и разбраковки, содержащий основание с наклонной неподвижной направляющей, две подвижные контактные колодки, состоящие из двух подвижных групп контактов, направляющую для разгрузки приборов, отличающийся тем, что, с целью
повышения производительности, автомат снабжен механизмом последовательной подачи приборов, содержащим два подвижных ползуна, несущих каждый по два кронштейна, на которых размешены параллельные плоскости, с расстоянием между ними, равным шагу рабочего хода ползуна, образуюшие подвижные направляющие, поочередно и попарно совмещающиеся с неподвижными плоскостями направляющих на позициях измерения и
загрузки-разгрузки.
J7

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для ударно-стыковой сварки | 1971 |
|
SU442030A1 |
| Контактное устройство для контроля микросхем | 1983 |
|
SU1167770A1 |
| Устройство для контроля и разбраковкиРАдиОэлЕМЕНТОВ | 1979 |
|
SU805451A1 |
| Устройство для перемещения и контактирования интегральных схем в климатической камере | 1983 |
|
SU1166199A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
| Устройство для монтажа радиоэлементов на печатных платах | 1985 |
|
SU1363545A1 |
| Автомат для контроля и отбраковки ламп накаливания | 1981 |
|
SU983831A1 |
| Устройство для сварки изделий из полимерных материалов | 1981 |
|
SU1031743A1 |
| Устройство для механических испытаний и разбраковки полупроводниковых приборов | 1979 |
|
SU911655A1 |



trxrr
fpu-.i
39
10
г
в
15,
е,7
.ff А
/
,7J
фцг.
