1
Изобретение относится к области открытых разработок месторождений полезных ископаемых.
Известно устройство для автоматического управления роторным экскаватором, состоящее из датчика ископаемого, неподвижно установленного на стреле ротора, блока сравнения сигнала от датчика с заданным уровнем, интегратора, связанного с механизмом поворота экскаватора, и функционального преобразователя, выполненного в виде нелинейного потенциометра, движок которого имеет возможность взаимодействия с механизмом поворота роторного экскаватора 1.
В известном устройстве при повороте роторной стрелы электрический сигнал от датчика поступает на блок сравнения сигнала с заданным уровнем. Интегратор интегрирует по углу ф отклонение сигнала с датчика от заданного уровня и через реле времени воздействует на привод подъема стрелы в направлении, соответствующем уменьшению интеграла отклонения.
Заданный уровень в блоке сравнения не остается при повороте стрелы постоянным, а изменяется в зависимости от угла ф и продвижения т экскаватора, компенсируя изменение геометрических условий работы датчика.
Недостатком устройства является TQ, что автоматическая подстройка заданного уровня
функциональным преобразователем реализуется по функциональной зависимости, которая каждый раз должна сниматься экспериментально лнбо рассчитываться.
5 Известно устройство автоматического управления роторным экскаватором, содержащее датчик границы руда-порода, закрепленный перед ротором на его стреле, блок сравнения, интегратор, реле времени и привод
0 подъема стрелы 2.
- Недостатком его является то, что датчик границы руда-порода расположен над поверхностью руды или над поверхностью породы, покрывающих руду. Такое расположение
датчика приводит к неопределенности информации о границе руда-порода.
Целью изобретения является повышение точности контроля границы руда-порода. Это достигается тем, что датчик расноло0 жен в зоне роторного колеса над поверхностью обрабатываемой струл ки и его местопололсение относительно вертикальной оси роторного колеса оп еделяется из соотношений
S,
L MH MCig,,
2
где L - расстояние от осп датчика до оси роторного колеса, м;
М - радиус зоны чувствительности датчи3Jка, м;
So - толщина вертикальной стружки, м; Я - расстояние от датчика до иижней
кромки ротора, м;
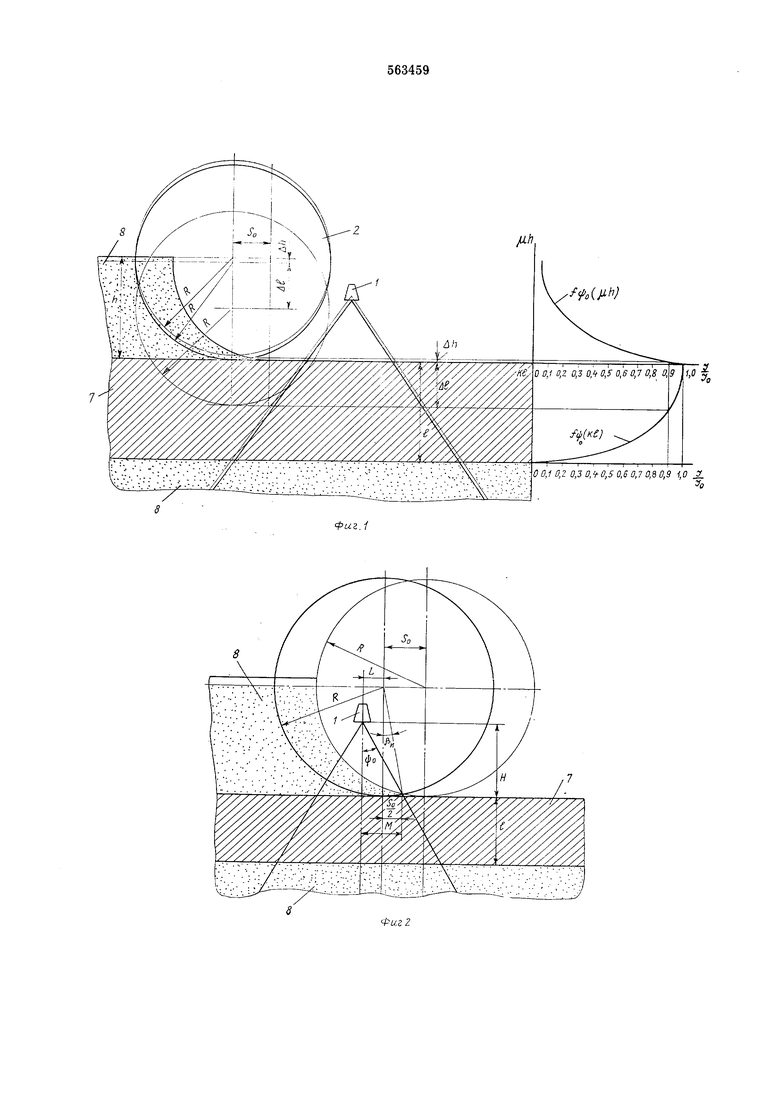
фо - угол раствора экрана датчика. На фиг. I приведены графики насыщения и поглощения интенсивности гамма-излучения; на фиг. 2 - расположение датчика; на фиг. 3 - зависимость интенсивности гамма-излучения от перемещений режущей кромки ротора; на фиг. 4 - блок-схема предлагаемого устройства.
Устройство состоит из датчика 1, расположенного в зоне роторного колеса 2, блока сравнения 3, интегратора 4, реле времени 5 и привада подъема 6.
При расположении датчика 1 над поверхностью пласта руды 7 или над поверхностью пород 8, покрывающих этот пласт руды (см. фиг. 1), имеем зависимости насыщения
- fi|jo (kl) и поглощения - : /4„ (а/г),
оfa
где / - измеряемая интенсивность гаммаизлучения над поверхностью пород, покрывающих рудный пласт, или от слоя руды в подошве пласта, мкр/час;
/о - интенсивность гамма-излучения насыщенного пласта, мкр/час;
k и |.1 - коэффициенты поглощения гаммаизлучения соответственно в руде и породе;
/ и h - мощность соответственно пласта руды и покрывающих пород, м.
Из представленных графиков видно, что в случае зачистки кровли пласта руды при одном и том же значении отношения ,9
0
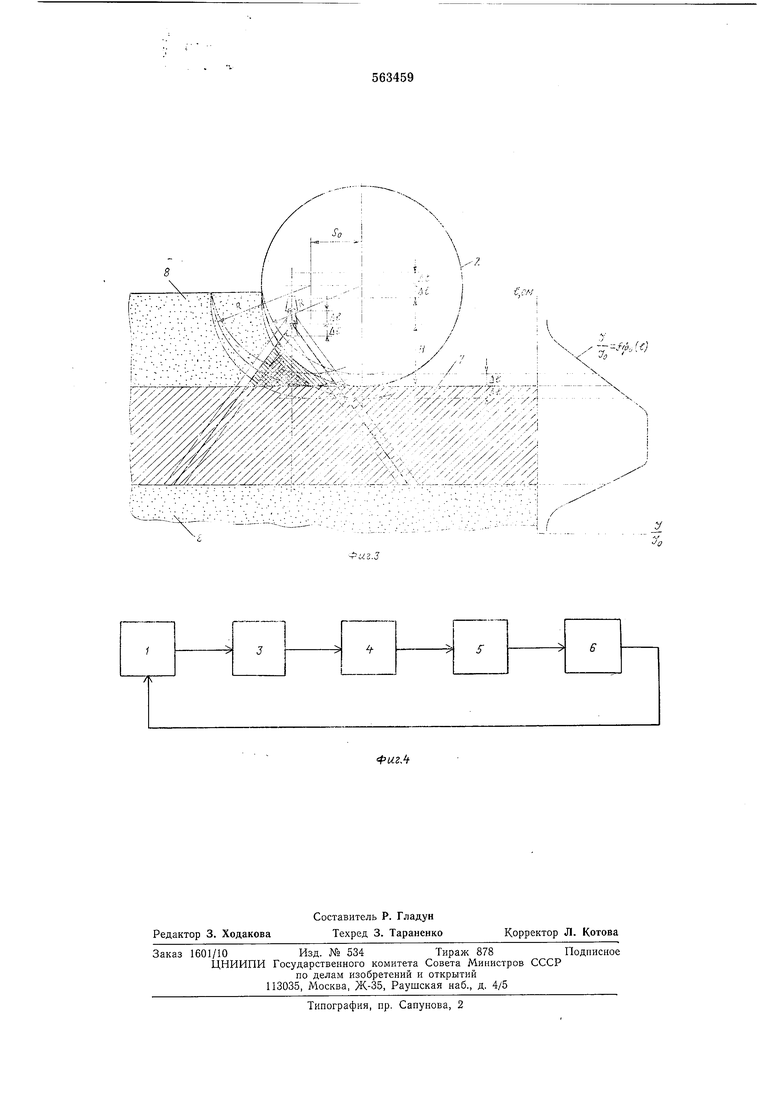
возникает неопределенность в положении режущей кромки роторного колеса 9 относительно границы руда-порода, которая выражается в смещениях роторного колеса на величину А/г выше границы пласта или на величину Л/ ниже границы пласта, где А/г и А/ - смещение режущей кромки роторного колеса соответственно выше или ниже границы пласта. Эта неопределенность исчезает при расположении датчика над снимаемой стружкой (см. фиг. 2). В этом случае вследствие вертикального перемещения режущей кромки ротора на расстояние в приконтактной зоне кровли или почвы пласта интенсивность гамма-излучения изменяется пропорционально этим перемещениям, что и показано на зависимости -
/г|зо(/) (см. фиг. 3). Работает устройство следующим образом.
Электрический сигнал от датчика 1 (см. фиг. 4), пропорциональный измеряемой величине интенсивности гамма-излучения пласта при работе роторного колеса 2, поступает на
блок сравнения сигнала с заданным, соответствующим граничной интенсивности гаммаизлучения.
В случае перехода режущей кромки ротора границы полезного ископаемого, сигнал от датчика превышает заданный, и на выходе блока сравнения появляется сигнал, пропорциональный этим смещениям. Этот сигнал, обрабатываемый интегратором, включает реле времени, которое воздействует на привод подъема роторной стрелы. В результате проходит подъем или опускание роторной стрелы с ротором к-границе руда-порода.
Установка датчика над снимаемой стружкой при указанных соотношениях позволяет
уменьшить отклонения режущей кромки роторного колеса относительно границы руда- порода с 16-20 см до 5-10 см.
Формула изобретения
Устройство автоматического управления роторным экскаватором, содержащее датчик границы руда-порода, закгрепленный перед
ротором на его стреле, блок сравнения, интегратор, реле времени и привод подъема стрелы, отличающееся тем, что, с целью иовышения точности контроля границы руда- порода, датчик расположен в зоне роторного
колеса над поверхностью обрабатываемой стружки и его местоположение относительно вертикальной оси роторного колеса определяется из соотношений
f - М -
.ctg%, 2
где L - расстояние от оси датчика до оси роторного колеса, м; М - радиус зоны чувствительности датчика м;
So - толщина вертикальной стружки, м; Я - расстояние от датчика до нижней
кромки ротора, м;
4о - угол раствора экрана датчика. Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство № 446602, кл. Е 21С 47/02, 1972.
2.Авторское свидетельство К° 253715, кл. Е 02F 9/20, 1967.
00,i 0,2 0,3 0,f-O.S 0,е 0,7 0,30.3 1,0 J.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления экскаватором | 1977 |
|
SU763530A1 |
| Устройство автоматического управления роторным экскаватором | 1979 |
|
SU881210A1 |
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU673704A1 |
| Устройство автоматического управления роторным экскаватором | 1972 |
|
SU446601A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1969 |
|
SU253715A1 |
| Устройство контроля положения рабочего органа машины относительно границ рудного тела | 1980 |
|
SU972090A1 |
| Стенд для отладки настроечных параметров добычной машины | 1980 |
|
SU989353A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОБЫЧЕЙ ДЛЯ БУРОВОГО КОМБАЙНА НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2004 |
|
RU2362972C2 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
-X
