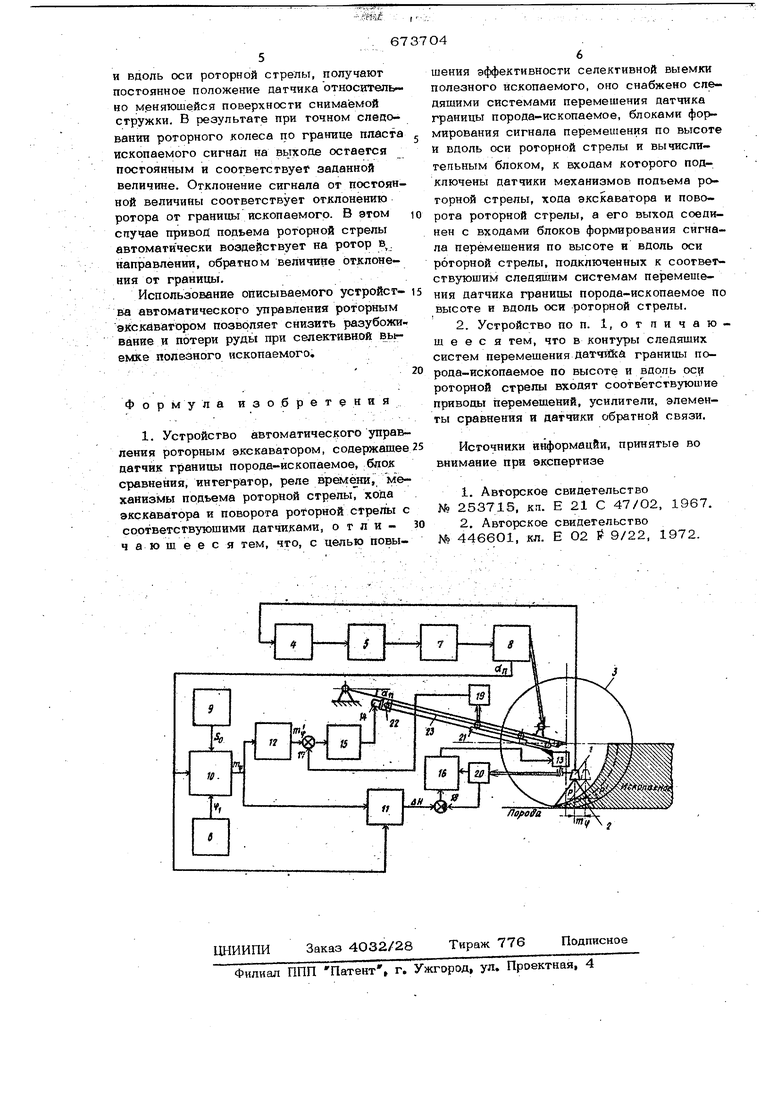
вижно установленном патчике ископаемого на сгрепе ротора происхопит уход зоны чувствительноети датчика с контакта руца-поропа при выемке пласта, что приводит к снижению интенсивности излучения и уровня сигнала с датчика. Снижение интенсивности изучения вызывает уменьшение точности отспеживани границы попеэного ископаемого, т.е. уменьшается величина коэффициента, характерйзуюшёго |нарастание инт нсквности .излучения на единицу длины в приграничной зоне ископа емого. Функциональный npeo6paeOBatenb производит только подстройку заданного уровня к уменьшающейся величине интенсивности излучения в приграничной зоне в зависимости Ът угла поворота роторной стрелы и продвижения экскаватора впереди не учитывает изменение угла подъема роторной стрелы, в то время как пласты йогут рас полагаться в уступе на разной высоте и поэтому необходимо учитывать угол подъе ма стрелы ротора. С целые повышения эффективности селективной выемки полезного ископаемого . предлагаемое устройство снабжено двумя следящими системами перемещения датчика границы порода-ископаемое,6покамй форми зъвания сигнала перемещения nb J3bici -i те и вдоль оси роторной стрелы и вычислительным блоком., к входам которого подключены да1тчики механизмов подъема роторной стрелы, хода экскаватора и поворота роторной стрелы, а его выхьа соеди- иен с входом блоков формирования сйгнапа перемещения пб высоте и вдоль оси ротор ной clrp eJtbi, подключенных к соотвегствую щим следящим системам перемещения датчика границы порода-ископаемое по высоте и вдоль оси роторной стрелы. При эток в контур следящих систем перёмёшенйя и да1тчика границы порода-ИскОйаёйбё по вь1 соте и вдоль оси роторной стрелы входят соответствующие приводы перемешений, усйпйтёпи, элементы СрёвнениЯ и датчики обратной связи. . -,- - -- . , - .;.:---.. --.i. .t-. .: : . На чертеже показана 6noJK-cxeMa описываемого устройства автоматического уйраёлёнИя роторным экскаватором. Устройство авт6матич:еско1 о управления роторным экскаватором включает в себя датчик 1 ископаемого, установленный на стреле 2 ротора 3; ; блок 4 сравнения сигнала с заданным интегратор 5, связанный с механнзмом 6 поворота экскаватора и подключенный через реле времени 7 к механизму 8 подъема роторной стрелы; механизм 9 хода экскаватора; вычиспитепьный блок 1О; блоки 11 и 12 формирования сигнала перемеигения по высоте и вдопь оси роторной стрелы; две следящие системы перемещения датчика границы порода-ископаемое по высоте и вдоль оси роторной стрелы, каждая из которых содержит приводы 13 и 14 соответствующих перемещений, электронные усилители 15 и 16, элементы сравнения 17 и 18, датчики 19 и 20 обратной свя-. аи. Датчик грайицы порода-ископаемое расположен на тележке 21, которая сея- зана с лебедкой 22 двумя концевыми канатами 23.. Устройство работает следующим . -J ;;. v-. . ; . ,- - -- - . - / j При повороте роторной стрелы 2 в горизонтальной плегкости эпекгрическ1ИЙ сигнал от датчика 1 поступает на блок сравнения сигнала с заданным уровнем. Интепратор 5 интегрирует по углу пОвОро а Ц отклонение сигнала с датчика границы от заданного уро1зня и через реле времени 7 воздействует йа механизм 8 подъема , рОгорной cifреш в направлении, сортвегсггвуюшёй умёньшёник) интеграла отклонения. При ведении ротора по границе ископаемого йфйичина сигнала с датчика 1 из-за его смещения Oi-HOcHTenbHO поверхности сгружкй не ОСт ается постоянной, а изменяется в зависимости от угла поворота ц и зав,исйт. от угла наклонаcS. роторной стрёль и толшинь Стружки SQ . Для поддержания сигнала с датчика 1 йсхЬгояннЬй величины необходимо осущесгвйятгь К4ёхайич Лую компенсацию положения всйёд. за Поверхностью сгружКй иа ёёпичинутПф , т,е. ось датчика пе-т рёмёшаетс из точки Рв точку .Р этс)го сигналь ; получаемые с механизма 9 хо.да экскаватора, механизма 8 подъема роторной сТрблы и механизма 6 поворота екскйватора, поступают на вычислительный ёлок 10 для Определения смещения датчиka ископаемого в горизонтальной плоское-, ти йа величину ЛПц) . Затем сигнал с вычислительного блока 1О, пропорциональный поступает на блоки 11 величине m к 12 формирования н следящие системы перемещения датчика по высоте и вдоль оси роторнОй стрелы. Следящие системы осуществляют соответственно перемещение датчика по высоте на величину и Н вверх с помощью винтового привода 13 и вдоль оси роторной стрелы на величину вниз с помошью лебедки 22 с приводом 14, двух концевых канатов 23 и тележки 21, Таким образом, изменяя автоматически -положение датчика па высоте 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления экскаватором | 1977 |
|
SU763530A1 |
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU563459A1 |
| Устройство автоматического управления роторным экскаватором | 1979 |
|
SU881210A1 |
| Устройство автоматического управления роторным экскаватором | 1972 |
|
SU446601A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1969 |
|
SU253715A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 2023 |
|
RU2817340C1 |
