1
Изобретение относится к области открытых разработок месторождений полезных ископаемых.
Известно устройство автоматического управления роторным экскаватором, включающее датчик ископаемого, неподвижно установленный на стреле ротора, блок сравнения сигнала от датчика с заданным уровнем, интегратор, связанный с механизмом поворота экскаватора и подключенный через реле времени к механизму подъема роторной стрелы.
Цель изобретения - повысить эффективность селективной выемки.
Достигается цель тем, что к блоку сравнения сигнала от датчика с заданным уровнем подключен дополннтельный блок, выполне ный в виде нелинейного потенциометра, движок которого имеет возможность взаимодействия с механизмом поворота роторного экскаватора, а блок питания - с механизмом хода.
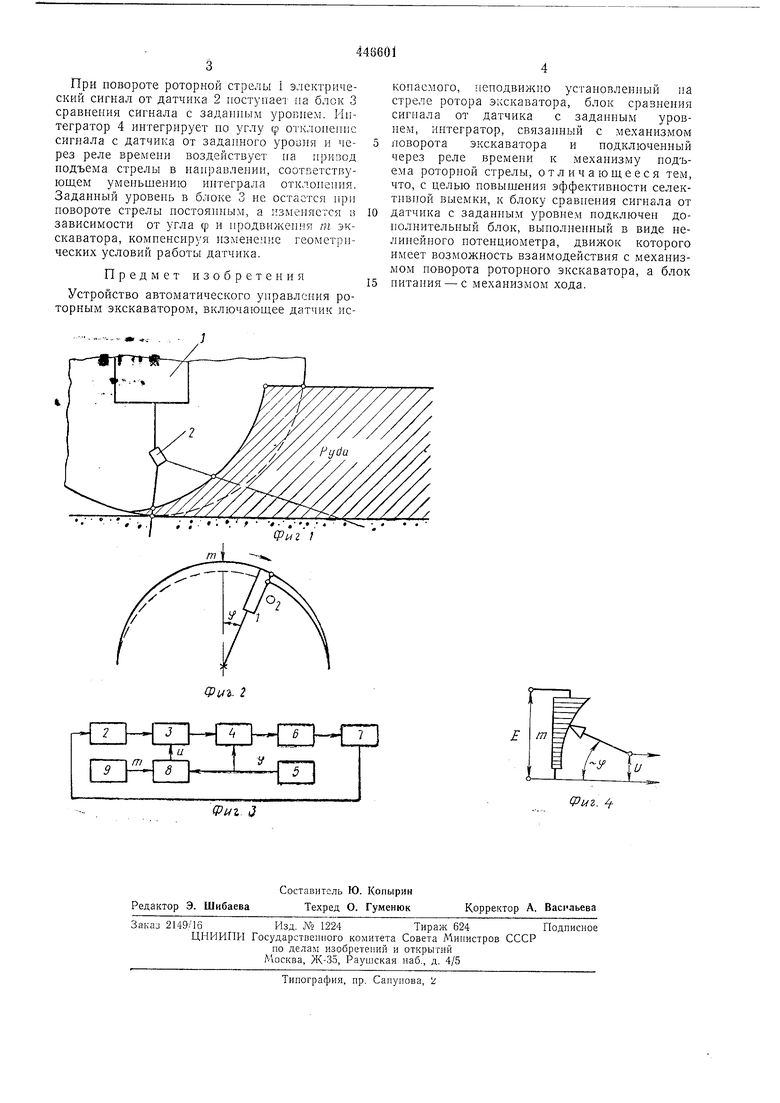
Иа фиг. 1 изображена схема расположения датчика ископаемого относительно роторного колеса и пласта ископаемого, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - блоксхема устройства; на фиг. 4 - фуп:Л ионального преобразователя.
Иа роторе 1 закреплен датчик 2, чувствительный к ископаемому. Выход датчика соединен с блоком 3 сравнения сигнала от датчика с задацнг7.1м уровнем, соответствующие, границе порода - ископаемое. Интегратор 4 подключен к выходу блока сравнения и электрически, например с помощью сельспнной передачи, связан с механизмом 5 поворота экскаватора. Выход интегратора соединен с реле времени 6, нодключенный к приводу 7 подъема роторной стрелы.
К блоку 3 подсоединен для автоматической подстройки заданного уровня функцнональный преобразователь 8 угла поворота ф роторной стрелы и продвижения т экскаватора в напрял ение подстройки U. Функциональный преобразователь имеет два входа, один из которых соединен электрически либо мсханически с механизмом 5 поворота, а другой - с мехаиизмо.м 9 хода экскаватора. Функциональный преобразователь может быть любого типа: электронным, механическим и др., в частности электрическим нелинейным нотенциометром, в котором напряжение Е питания потенциометра пропорционально нродвнжению m экскаватора, а перемещение пропорционально углу ieждy осью стрелы и направлением продвижения экскаватора.
Функциональная зависимость, реализуемая иреобразователем, снимается эксиериментально либо рассчитывается. Предлагаемое устройство работает следующим образом.
При повороте роторной стрелы 1 электрический сигнал от датчика 2 поступает па блок 3 сравнения сигнала с задавшем уровнем. Интегратор 4 интегрирует по углу ф отклонение сигнала с датчика от заданного уровня и через реле времени воздействует па привод подъема стрелы в направлепин, соответствующем уменьшению интеграла отклонения. Заданный уровень в блоке 3 не остается при повороте стрелы постоянным, а изменяется в зависимости от угла ф и продвнжепня т экскаватора, компенсируя изменение геометрических условий работы датчика.
Предмет изобретения
Устройство автоматического управления роторным экскаватором, включающее датчик иекопаемого, неподвижно установленный па стреле ротора экскаватора, блок сравнения сигнала от .датчика с заданным уровнем, интегратор, связа1тый с механизмом поворота экскаватора и подключенный через реле времени к механизму нодъема роторной стрелы, отличающееся тем, что, с целью повышения эффективности селективной выемки, к блоку сравнения сигнала от датчика с заданным уровнем подключен донолнительный блок, выиолпенный в виде нелинейного потенциометра, движок которого имеет возможность взаимодействия с механизмом поворота роторного экскаватора, а блок питания - с механизмом хода.
Фиг- 2
Фиг J
(. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU563459A1 |
| Устройство автоматического управления роторным экскаватором | 1975 |
|
SU673704A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1969 |
|
SU253715A1 |
| Устройство автоматического управления экскаватором | 1977 |
|
SU763530A1 |
| Устройство автоматического управления роторным экскаватором | 1979 |
|
SU881210A1 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
