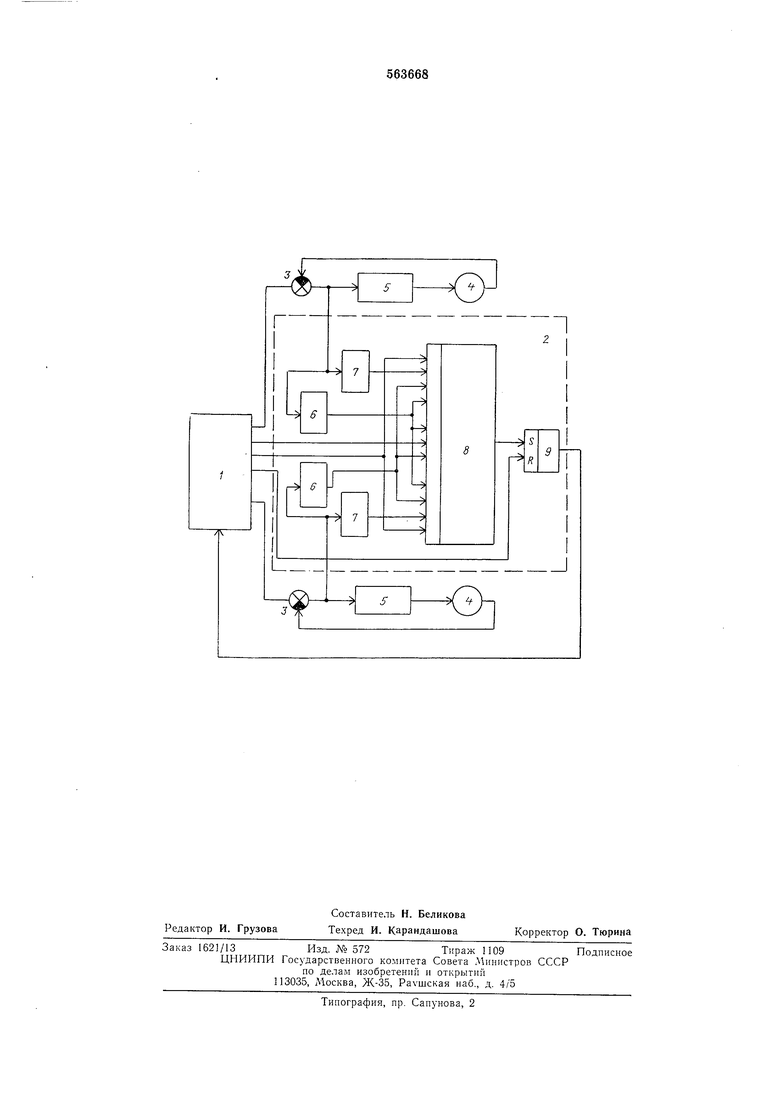
лей 6 и 7 импульсов, элемента И-ИЛИ 8 и триггера 9.
Выходы формирователей 6, 7 подключены к входам элемента PI-ИЛИ 8, выход которого подсоединен к 5-входу триггера, а -/ -входы последнего соединены с выходами п-нтериолятора.
Формирователи 6 импульсов подают сигнал «г, если иет положительного сигнала на выходе блока сравнения соответствующей координаты, а формирователи 7 выдают сигнал Ь; при наличии отрицательного сигнала на выходе элемента €рав 1ения.
Устройство работает следующим образом.
При увеличении скорости движения по дайной координате или сохранении ее постоянной, т. е. когда пет торможения, элемент 8 выдает
п
сигнал, если , что означает отсутствие
положительного сигнала на выходах всех элементов рассогласования, т. е. то, что приводы ВСех координат уже отработали требуемые перемещения. Триггер 9 устанавливается в «1, начинает работать тактовый генератор (на чертеже не показан) интерполятора и интерполятор выдает следующие импульсы перемещения и пмпульс, который устанавливает триггер в «О. Ири разгоне, когда время цикла работы интерполятора много меньше времени отработки одного щага, «а наименее быстродействующий привод практически все время подается максимальное управляющее воздействие, т. е. устройство работает как оптимальное по быстродействию.
Так происходит до момента достижения нриводом требуемой скорости. Все это время период поступления управляющих импульсов уменьшается и наконец становится равным минимальному периоду работы интерполятора, определенному из допустимой скорости обработки на данном участке. В дальнейшем частота поступления управляющих импульсов определяется уже пе свойствами привода, как при разгоие, а равна максимальной частоте тактового генератора. В иачале торможения с интерполятора 1 поступает сигнал, элемент 8 выдает сигнал при
пп
V , l,
т. е. при наличии отрицательного напряжения на выходе хотя бы одного блока 3 и отсутствии положительных «апряжений на входах всех приводов 5 интерполятор просто следит за наиболее инерционным приводом и поддерживает соотнощение между координатами. Таким образом, устройство обеспечивает разгон и торможение наименее быстродействующего (ведущего) привода максимальными по величине управляющими сигналами, причем для каждого момента ведущим может
быть привод любой из координат, т. е. происходит оптимальная по быстродействию отработка кривой. Ири этом погрешность положения рабочего органа по каждой из координат не превышает одного щага датчика 4 и, в отличие от прототипа, не требуется заранее определять ведущую и ведомую координаты. Все это позволяет получить инвариантность в системе по отношению к изменениям зправляющих сигналов в более широких пределах.
Таким образом, предлагаемое устройство имеет высокое быстродействие и точность и может применяться для движения по дюбой траектории и при изменении частотных свойств привода, например в случае измеиения величины нагрузки.
Формула изобретения
Устройство для контурного программного управления, содержащее интерполятор, соединенный с блоками сравнения, выходы которых через последовательно соединенные координатные приводы и датчики перемещения
подключены к входам соответствующих блоков сравнения, отличающееся тем, что, с целью повышения быстродействия и точности устройства, в него введены формирователи импульсов, триггер и элемент И-ИЛИ,
входы которого подключены к выходам интерполятора и через формирователи импульсов к выходам соответствующих блоков сравнения, а выход элемента И-ИЛИ через триггер, один из входов которого подключен к выходу
интерполятора, соединен с тактовым входом интерполятора.
Источники информации, принятые во внимание при экспертизе
1.«Контурные системы числового управления и их элементы. Электроавтоматика станков. Л ., «Машиностроение, 1972, с. 6-15.
2.Авторское свидетельство СССР № 395807, кл. G 05В 19/40, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контурного программногоупРАВлЕНия | 1979 |
|
SU805261A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Устройство для программного управления | 1978 |
|
SU734617A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |