112
Изобретение относится к автоматическому управлению и может быть использовано в системах числового программного управления технологическим оборудованием, в частности в система индивидуального и группового управления станками с ЧПУ от ЭВМ.
Целью изобретения является повышение быстродействия устройства.
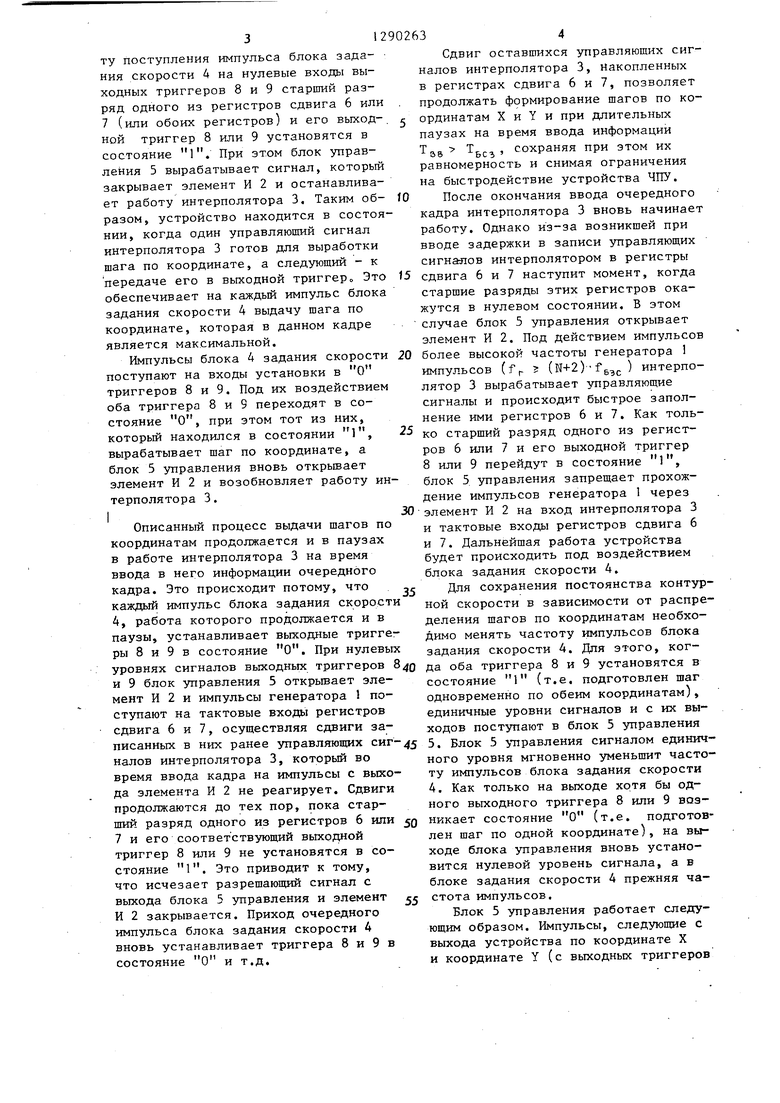
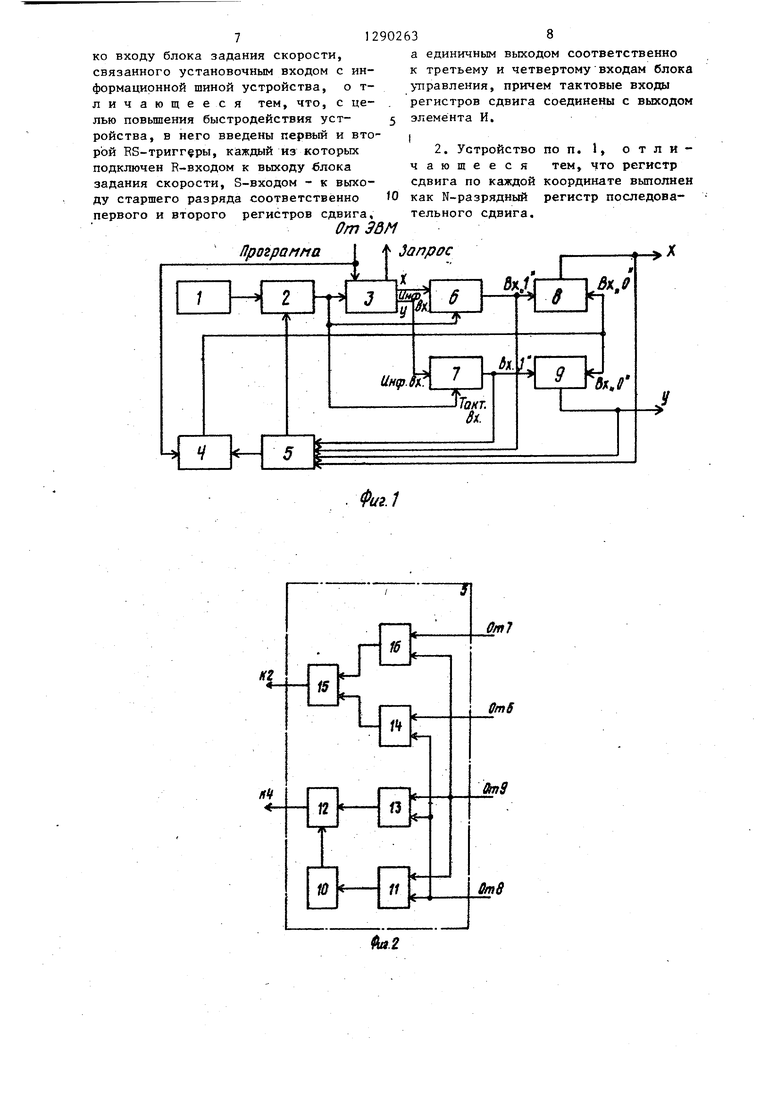
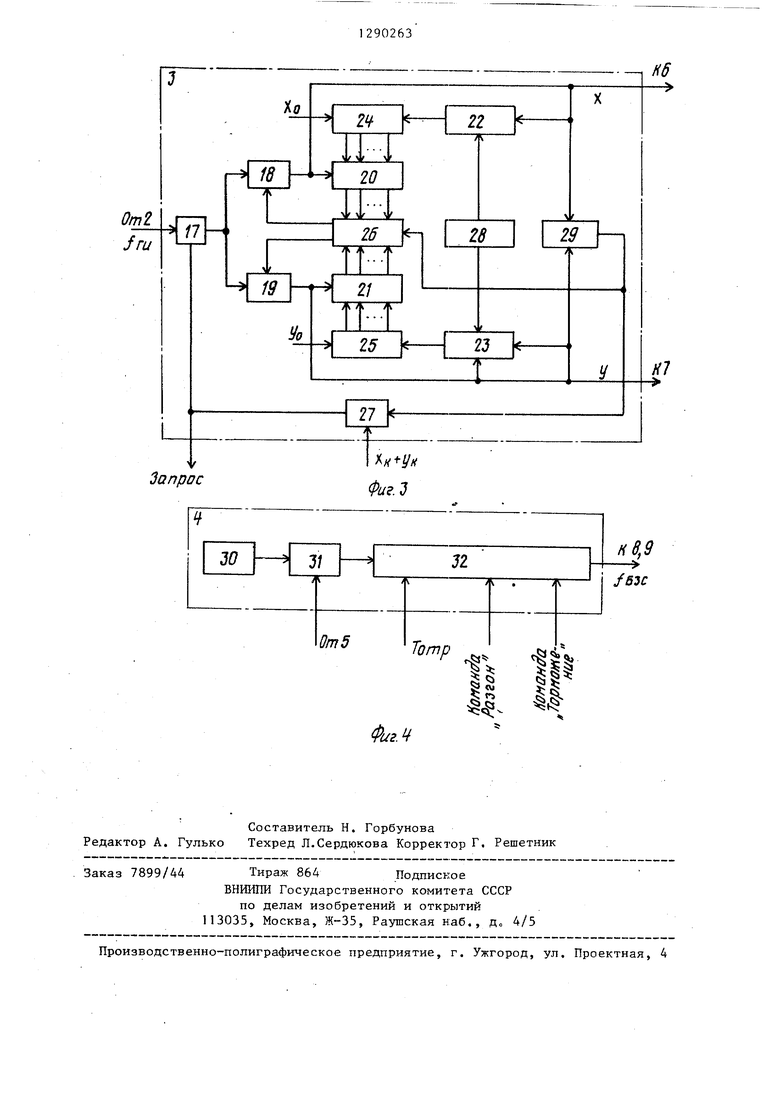
На фиг. 1 изображена блок-схема устройства числового программного управления; на фиг. 2-4 - функциональные схемы блока управления, блок- схемы интерполятора и блок-схемы блока задания скорости соответственно.
Устройство содержит (фиг. 1) генератор 1 импульсов, элемент И 2, интерполятор 3, блок 4 задания скорости, блок 5 управления, первый и второй регистры сдвига 6 и 7, первый и второй RS-триггеры 8 и 9.
Блок управления 5 {фиг. 2) содержит элемент задержки 10, элемент И 11 триггер 12, элемент ИЛИ 13, элемент И 14, элемент ИЛИ-НЕ 15 и элемент И 16. Часть блока управления, включающая элементы 10-13, представляет схему управления частоты блока задания скорости 4 и обеспечивает постоянство контурной скорости методом определения наличия игага по обеим координатным осям, а часть включающая элементы 14-16 - схему управления элементом И 2 и через него остальными блоками устройства.
Интерполятор 3 (фиг. З) содержит элементы И 17-23, служащие для управления потоками импульсов от генератора импульсов 1, реверсивные счетчики 24 и 25, куда эаносят начальные
координаты окружности Х, Y, сумматор 26, в котором вычисляется значение оценочной функции, счетчик 27 числа шагов, блок 28 формирования квадрантов и элемент ИЛИ 29.
Блок 4 задания скорости (фиг. 4) содержит генера;тор импульсов 30, управляемый делитель частоты 31 и узел разгона и торможения 32. Генератор импульсов 30 вырабатывает импульсы постоянной частоты. В делителе частоты 31 осуществляется коррекция частоты импульсов генератора импульсов путем деления на коэффициенты К, или К,, где К,сК, Кг/К, 1,41.
.
Известно, что задержка сигналов на выходе интерполятора нарушает их равномерное следование. При этом в
станке возникают дополнительные динамические нагрузки, которые могут нарушить его работоспособность или ухудшить качество обработки детали. Одной из причин возникновения таких задержек является пауза в работе интерполятора на время ввода в него очередного кадра управляющей программы. Поэтому всегда стремятся уменьшить ее длительность так, чтобы вы
полнялось условие Т
ве
- 63С
а Т,
где
g - время ввода кадра, « . gj период следования импульсов блока задания скорости интерполятора.
О
5
0
5
0
0
5
0
5
Устройство работает следующим образом.
Перед началом работы элемент И 2 открыт, все разряды регистров сдвига 6 и 7 и выходные триггеры 8 и 9 установлены в нулевое состояние, интерполятор 3 вырабатывает сигнал запроса на ввод первого кадра управляющей программы. После окончания ввода кадра интерполятор 3 под воздействием импульсов генератора J, поступающих на его вход через открытый элемент И 2, начинает вырабатывать управляющие сигналы, которые поступают на соответствующие информационные входы (координатных) регистров сдвига 6 и 7, Под воздействием тех же импульсов генератора, поступающих через открытый элемент И 2 на тактовые входы регистров сдвига 6 и 7, управляющие сигналы интерполятора 3 по каждой из координат X и Y последовательно, друг за другом, записываются в младший разряд соответствующих регистров сдвига 6 и 7. Одновременно с приходом каждого тактового импульса содержимое каждого разряда регистров сдвига 6 и 7 передается соседнему старшему разряду,
В результате этого в регистрах сдвига 6 и 7 одновременно с записью управляющих сигналов интерполятора 3 осуществляется их последовательный сдвиг в старшие разряды и в триггеры 8 и 9, Информация о состоянии старших разрядов регистра сдвига 6 и 7 и (выходных) триггеров 8 и 9 поступает на соответствующие входы блока управления 5.
Так как частота f генератора I импульсов вьш1е частоты импульсов f блока задания скорости 4 (f г (N + + 2)fgj, ),, где N - количество разрядов регистров сдвига, то к моменту поступления импульса блока зада- ния скорости 4 на нулевые входы выходных триггеров 8 и 9 старший разряд одного из регистров сдвига 6 или 7 (или обоих регистров) и его выходной триггер 8 или 9 установятся в состояние 1. При этом блок управления 5 вырабатывает сигнал, который закрывает элемент И 2 и останавливает работу интерполятора 3. Таким образом, устройство находится в состоянии, когда один управляющий сигнал интерполятора 3 готов для выработки шага по координате, а следующий - к передаче его в выходной триггер Это обеспечивает на каждый импульс блока задания скорости 4 выдачу шага по координате, которая в данном кадре является максимальной.
Импульсы блока 4 задания скорости поступают на входы установки в О триггеров 8 и 9. Под их воздействием оба триггера 8 и 9 переходят в состояние О, при этом тот из них, который находился в состоянии 1, вырабатывает шаг по координате, а блок 5 управления вновь открьшает элемент И 2 и возобновляет работу интерполятора 3.
I
Описанный процесс выдачи шагов по
координатам продолжается и в паузах в работе интерполятора 3 на время ввода в него информации очередного кадра. Это происходит потому, что каждый импульс блока задания скорост 4, работа которого продолжается и в паузы, устанавливает выходные триггеры 8 и 9 в состояние О. При нулевы
35 Для сохранения постоянства контурной скорости в зависимости от распределения шагов по координатам необходимо менять частоту импульсов блока задания скорости 4. Для этого, когуровнях сигналов выходных триггеров 840 да оба триггера 8 и 9 установятся в
и 9 блок управления 5 открывает элемент И 2 и импульсы генератора 1 поступают на тактовые входы регистров сдвига 6 и 7, осуществляя сдвиги записанных; в них ранее управляющих сиг-45 5. Блок 5 управления сигналом единичсостояние 1 (т.е. подготовлен шаг одновременно по обеим координатам), единичные уровни сигналов и с их выходов поступают в блок 5 управления
налов интерполятора 3, который во время ввода кадра на импульсы с выхода элемента И 2 не реагирует. Сдвиги продолжаются до тех пор, пока старший разряд одного из регистров 6 или jg 7 и его соответствующий выходной триггер 8 или 9 не установятся в состояние 1. Это приводит к тому, что исчезает разрешающий сигнал с выхода блока 5 управления и элемент И 2 закрывается. Приход очередного импульса блока задания скорости 4 вновь устанавливает триггера 8 и 9 в состояние О и т.д.
55
кого уровня мгновенно уменьшит частоту импульсов блока задания скорости 4. Как только на выходе хотя бы одного выходного триггера В или 9 возникает состояние о (т.е. подготовлен шаг по одной координате), на выходе блока управления вновь установится нулевой уровень сигнала, а в блоке задания скорости 4 прежняя частота импульсов.
Блок 5 управления работает следующим образом. Импульсы, следующие с выхода устройства по координате X и координате Y (с выходных триггеров
Сдвиг оставшихся управляющих сигналов интерполятора 3, накопленных в регистрах сдвига 6 и 7, позволяет продолжать формирование шагов по ко- 5 ординатам X и Y и при длительных паузах на время ввода информации Tgg . , сохраняя при этом их равномерность и снимая ограничения на быстродействие устройства ЧПУ.
O После окончания ввода очередного кадра интерполятора 3 вновь начинает работу. Однако из-за возникшей при вводе задержки в записи управляющих сигналов интерполятором в регистры
5 сдвига 6 и 7 наступит момент, когда старшие разряды этих регистров окажутся в нулевом состоянии. В этом случае блок 5 управления открывает элемент И 2. Под действием импульсов
0 более высокой частоты генератора 1 импульсов (f,- (N+2)-fg(,) интерполятор 3 вырабатывает управляющие сигналы и происходит быстрое заполнение ими регистров 6 и 7. Как толь5 ко старший разряд одного из регистров 6 или 7 и его выходной триггер 8 или 9 перейдут в состояние 1, блок 5 управления запрещает прохождение импульсов генератора 1 через
0 элемент И 2 на вход интерполятора 3 и тактовые входы регистров сдвига 6 и 7. Дальнейшая работа устройства будет происходить под воздействием блока задания скорости 4.
5 Для сохранения постоянства контурной скорости в зависимости от распределения шагов по координатам необходимо менять частоту импульсов блока задания скорости 4. Для этого, ког0 да оба триггера 8 и 9 установятся в
5. Блок 5 управления сигналом единичсостояние 1 (т.е. подготовлен шаг одновременно по обеим координатам), единичные уровни сигналов и с их выходов поступают в блок 5 управления
g
5
кого уровня мгновенно уменьшит частоту импульсов блока задания скорости 4. Как только на выходе хотя бы одного выходного триггера В или 9 возникает состояние о (т.е. подготовлен шаг по одной координате), на выходе блока управления вновь установится нулевой уровень сигнала, а в блоке задания скорости 4 прежняя частота импульсов.
Блок 5 управления работает следующим образом. Импульсы, следующие с выхода устройства по координате X и координате Y (с выходных триггеров
8 и 9), поступают на элемент И 11 и при наличии их по обеим координатам запускают триггер 12 (устанавливают состояние 1), который уменьшает частоту блока 4 задания скорости. Следующий импульс (тпо любой координате) гасит триггер 12 (устанавливает состояние О) через элемент ИЛИ 13 и таким образом восстанавливает частоту блока задания скорости 4. Элемент задержки 10 задерживает запус- кающий импульс на время действия гасящего импульса.
Схема управления элементом И 2 и через него всем устройством содержит два элемента И 14 и 16, работающие на элемент ИЛИ-НЕ 15, и соответствует известной микросхеме К155ЛР1. На входы элемента И 14 поступают сигналы с выходов регистра сдвига 6 и выходного триггера 8, а на входы элемента И 16 - с выходов регистра сдвига 7 и триггера 8.
В соответствии с вьтолняемой этой схемой логической функцией элемент И 2 закрыт, когда старший разряд одного из регистров сдвига 6 или 7 и его триггер 8 или 9 устанавливаются в состояние 1 (уровень логического нуля на выходе элемента ИПИ-НЕ 15). В остальных случаях элемент И 2 открыт (уровень .логической единицы на выходе элемента 15). Этим обеспечивается управление работой устройства.
Интерполятор 3 в режиме круговой интерполяции работает следующим образом. В зависимости от знака оценочной функции (И) в сумматоре 26 входные импульсы через открытьй элемент И 17 и через элементы И 18 и 19 направляются по координатам X или Y. При этом, если , шаг делается по координате X и удвоенное содержимое реверсивного счетчика 24 через элемент И 20 складывается с содержимым сумматора 26. Кроме того, на младший разряд сумматора 26 через элемент ИЛИ 29 подается единица. Текущее значение координаты Х увеличивается на единицу, для чего к содержимому реверсивного счетчика 24 прибавляется единица. При И О шаг делается по оси Y и удвоенное содержимое реверсивного счетчика 25 через элемент И 21 вычитается из содержимого сумматора 26. Удвоение происходит за счет сдвига на один разряд. К содер- жимому сумматора 26 через Элемент
fO
902636
ИЛИ 29 тоже прибавляется единица. Содержимое реверсивного счетчика 25 . уменьшается на единицу. Конец работы наступает при заполнении счетчика 27, который закрывает элемент 17 и формирует запрос на следующий кадр. В счетчик 27 заносится сумма , , определяющая конечную точку. Должны ли реверсивные счетчики 24 и 25 складывать импульсы или вычитать, зависит от направления обхода окружности и от квадранта, который в настоящий момент отрабатывается. Сигналы управления на элементы И 22 и 23 для этого вырабатывает блок 28 формирования квадрантов. Для того, чтобы интерполятор 3 работал в режиме линейной интерполяции, необходимо, чтобы содержимое реверсивных счетчиков 24 и 25 не удваивалось и к нему, а также к содержимому сумматора 26 не прибавлялась (вычиталась) единица.
Это необходимо для стабилизации контурной ск.орости. Коэффициент деления делителя частоты 31 меняется в зависимости от уровня сигнала с выхода блока управления 5: уровню ло- гическо15 единицы соответствует коэф15
20
25
35
40
30
фициент Kg, уровню логического нуля К,.
Для : гправления частотой импульсов
f. - блока 4 задания скорости от проБЭС
граммы используется узел автоматического разгона и торможения 32.
Формула изобретения
1, Устройство для программного управления, содержащее генератор импульсов, подключенньй выходом к первому входу элемента И, связанного вторым входом с первым выходом блока уп45 равления, а выходом с частотным вхо- дом интерполятора, подключенного установочным входом и выходом Запрос соответственно к информационной шине и к управляющему выходу устройства,
50 а информационными выходами по координатам X и Y - к информационным входам соответственно первого и второго регистров сдвига, соединенных выходами соответственно с первым и
55 вторым входом блока управления, подключенного третьим и четвертым входом к информационным выходам соответственно по координате Y и по координате X устройства, а выходам ко входу блока задания скорости, связанного установочным входом с информационной шиной устройства, о т- личающееся тем, что, с це- . лью повьшения быстродействия уст- 5 ройства, в него введены первый и второй RS-тригг ры, каждый из которых подключен R-входом к выходу блока задания скорости, S-входом - к выходу старшего разряда соответственно fO первого и второго регистров сдвига,
От ЭВМ
. Фиг.1
. 5 fO
2902638
а единичным выходом соответственно к третьему и четвертому входам блока управления, причем тактовые входы регистров сдвига соединены с выходом элемента И,
по п. 1, отлитем, что регистр координате выполнен регистр последова
Запрос
Составитель Н. Горбунова Редактор А. Гулько Техред Л.Сердюкова Корректор Г. Решетник
7899/44
Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., До 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
teJ
Фиг.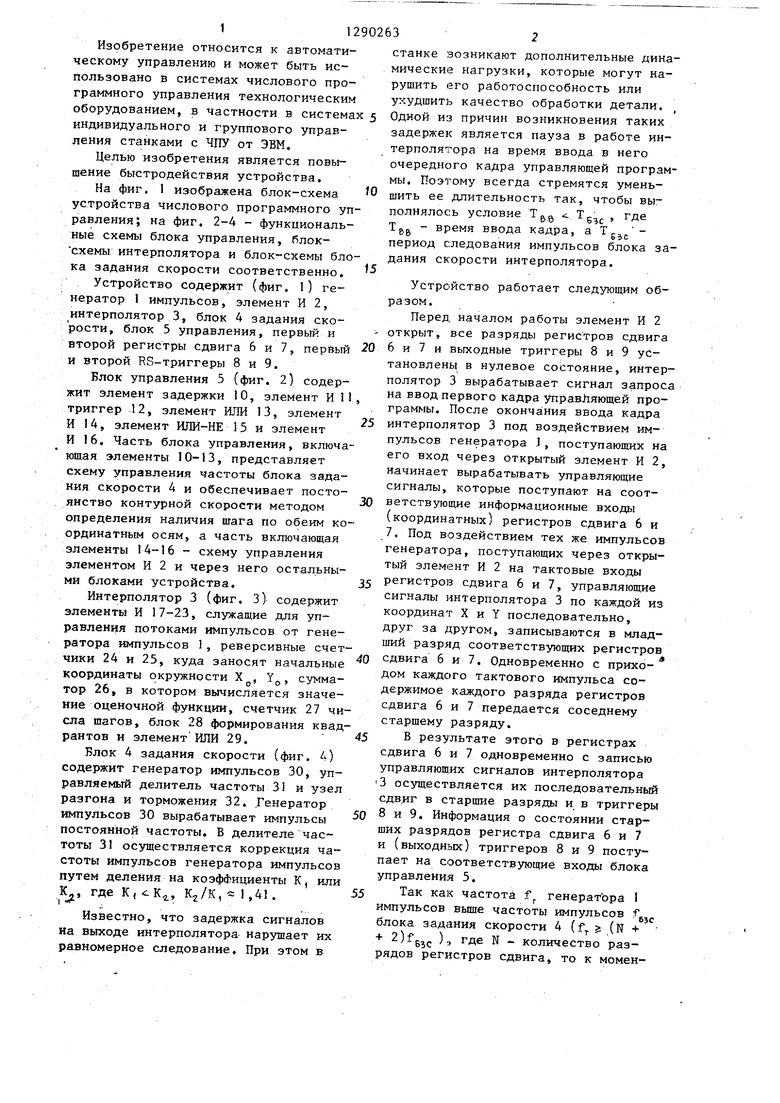

| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейно-круговой интерполятор | 1986 |
|
SU1312530A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Устройство для стабилизации скорости подачи в станках с программным управлением | 1985 |
|
SU1325411A1 |
| Линейно-круговой интерполятор | 1987 |
|
SU1462250A2 |
Изобретение относится к области автоматического управления и может быть использовано в-системах числового программного управления технологическим оборудованием. Наиболее целесообразно его использование в системах индивидуального и группового управления станками с ЧПУ от ЭВМ. Цель изобретения - повьшение быстродействия устройства Устройство содержит генератор импульсов, элемент И, интерполятор, блок задания скорости, блок управления, первый и второй регистры сдвига, первый и второй RS-триггеры. Введение первого и второго RS-триггеров и новых функциональных связей позволяет достичь поставленную цель за счет формирования шагов по координатам X и Y при длительных паузах на время ввода информации в устройство, 1 з.п.ф-лы. 4 ил. (Л
| Киселева Б.Г | |||
| и др | |||
| Программные устройства контурного управления на базе микро-ЭВМ | |||
| Электронная промьшленность | |||
| М | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Устройство для числового пргораммного управления | 1975 |
|
SU562797A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Сб | |||
| Фазовые системы числового программного управления станками /Под ред | |||
| Киселева В | |||
| М | |||
| М.; Машиностроение, 1976, Сс 139, рисо 76 | |||
| Сб | |||
| Способы подготовки программ и интерполяторы для контурных систем числового управления станками | |||
| М,: Машиностроение, 1970, с, 96, рис | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Насос | 1917 |
|
SU13A1 |
