(54) УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для комбинированного числового программного управления | 1973 |
|
SU485419A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Устройство для программного управления | 1980 |
|
SU883872A1 |
| Устройство для программного управления скоростью шагового электропривода | 1983 |
|
SU1137444A1 |
| Устройство для программногоупРАВлЕНия | 1978 |
|
SU807234A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
I
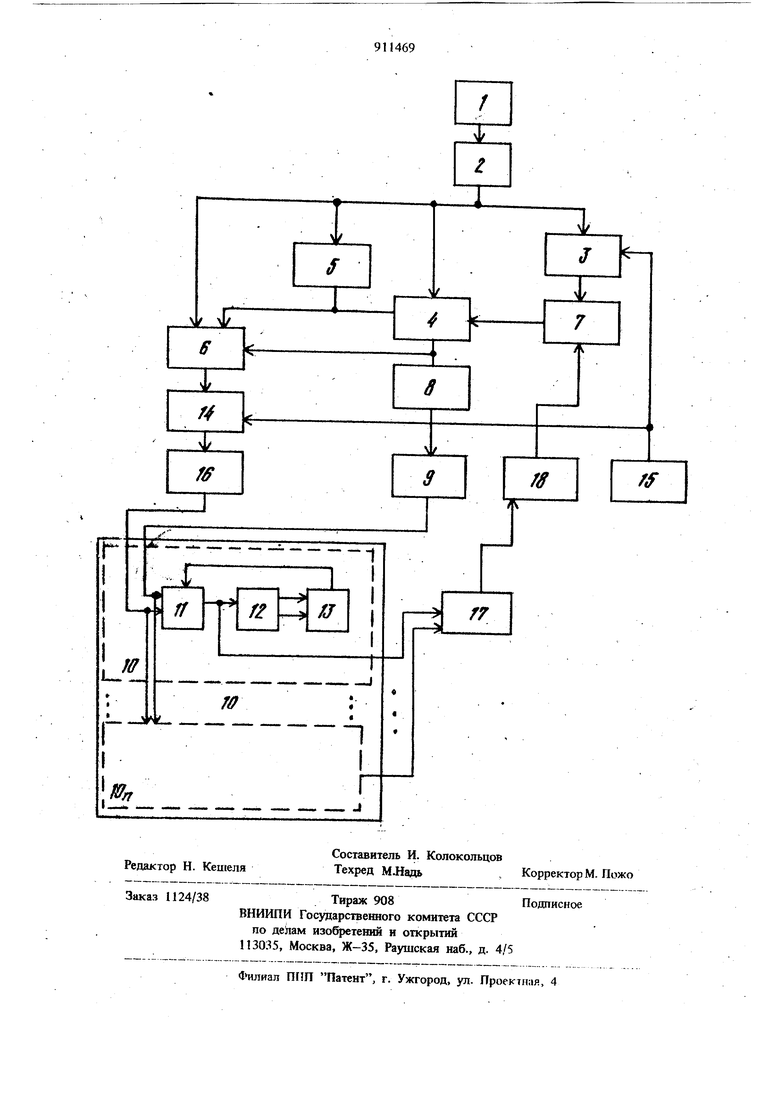
Изобретение относится к автоматическому управлению и вычислительной технике, может быть использовано в системах числового программного управления координатными перемещениями.. , По основиому aBTXB.N 485419 известно устройство содержащее датчик обратной связи, подключенный к сумматору, и последовательно соединенные блок ввода, блок буферной памяти, связанный с блоком управления, интерполятор, блок регулирования контурной скорости и следящий привод, причем блок управления связан с интерполятором, соединеннь1м через генератор импульсов с блоком разгона и торможения, подключенным к буферной памяти, коммутатор, входы которого подключены к выходам блока буферной памяти, интерполятора и блока управления, а выход через цифрраналоговый преобразователь - к следящему приводу, причем датчик обратной связи соединен с блоком - разгона и торможения 1.
Недостатком такого устройства при работе, в частности в двухкоординатной системе.
т.е. при взаимосвязанном регулировании, является низкое быстродействие в момент подачи сигнала управления (в период разгона механизмов) при отработке по контуру, при использовании, например, следящего привода, содержащего усилитель, двигатель, кинематически связанный с нагрузкой и тахоге, нератором в цепи обратной связи. Обуславливается зто тем, что в первоначальный момент переходного процесса при подаче сиг10нала управления в связи с наличием сил сухого трения в передающих механизмах и инерции вращающихся масс двигателя и нагрузки имеет место зона застоя, действие отрицательной обратной связи по скорости,
15 вызываемой тахогенератором, не сказывается на параметрах сигнала управления двигателем. В течение некоторого времени, необходимого для преодоления сил сухого трения и инерции, двигатель находится в состоянии
30 покоя. Следящий привод в этом случае оказывается разомкнутым по цепи обратной связи. Информация, поступающая на вход усилителя, не испытывая действия отрица391тельной обратной связи, переводит его в режим насыщения, исключить который введением дополнительных средств коррекции представляет определенные трудности. Аналогично и для случая отсутствия зоны застоя. При изменении сигнала управления следящим приводом в силу того, что ускорение мехаш1змов не может нзмениться мгновенно, имеет место всплеск оишбки и не соответствие действия отрицательной обратной связи по скорости управляющему воздействию. . В данном случае всплеск оцшбки также может явиться причиной того, что усилитель окажется в зоне насыщения. Следует отметить, что в реальных механизмах имеют место флюктуации нагрузки, иногда изменяю щиеся в широких пределах, где также не исключается режим работы усилителя в зоне насыщения. Таким образом, получается несоответствие темпа вьщачи информации с интерполятора динамическим возможностям электропривода. Но при взаимосвязанном регулировании в режиме обработ1си по контуру, например по линии, должно выдерживаться постоянств отношения скоростей между отдельными координатами. Наличие нелинейности в следующем приводе в виде насьпцения усилителя, обуславливаемое силами сухого трения и инерцией масс иатрузкк, затрудняет, а в отдельных случаях исключает возможность обеспечения постоянства отношения скоростей в начале разгона, результирующий контур при зтом выполняется с ощибкой. В практике одним из методов снижения отрицательного действия нелинейностей, вызванных насыщением усилителей, обуславливаемого силами сухого трения и инерцией масс нагрузки, является умеш щение частоты подачи управляющих импульсов, введени предыскажений в программу. Однако это влечет за собой уменьшение быстродействия, & поскольку имеют место флюктуации наi грузки, не исключается работа усилителя ; следящего привода в режиме насыщения, т.е IB нелинейнш зоне. Цель изобретения - повышение быстродействия устройства. Указанная цель достигается тем, что в устройство для комбинированного числового программного управления введены последова тельно соединенные блок координатных поро говых элементов, подключенный входами к выходам. следящего привода, и элемент ИЛ1, подсоединенный выходом ко второму входу генератора импульсов. На чертеже приведена блок-схема устройства. Устройство содержит блок 1 ввода, соеди ненный с блоком 2 буферной памяти, соответствующие выходы которого подключены к блоку 3 разгона и торможения и интерполятору 4, блоку 5 управления и первому входу коммутатора 6. Блок 3 разгона и торможения связан с генератором 7 импульсов, подключенным к интерполятору 4. Выходы текущих значений интерполятора соединены со вторым входом коммутатора 6, управляющий вход которого соединен с блоком 5 управления, который связан с интерполятором 4. Интерполйтор 4 через последовательно соединенные блок 8 регулирования контурной скорости и импульсно-потенциальный преобразователь 9 подключен к следящему приводу 10, содержащему усилитель 11, двигатель 12 и тахогенератор 13, выходом соединенным с одним нз входов усилителя 11. Один из входов сумматора 14 связан с коммутатором 6, а другой - с датчиком 15 обратной связи (кинематически соединенного с валом двигателя 12, на чертеже не показано), подключенным также к блоку 3 разгона и торможения 3. Выход сумматора 14через цифроаналоговый преобразователь 16 подключен к следящему приводу 10. Блок 17 координатнь1Х пороговых элементов входами подключен к выходу усилителя 11 каждой координаты привода 10, а выходом - ко входу элемента ИЛИ 18. Устройство работает следующим образом. Информация на отработку, а также сигна лы команд поступают из блока 1 в блок 2 и далее - в блок 5, интер полятор 4, блок 3 и коммутатор 6. Устройство работает в двух режимах: по контуру н в режиме позиционирования., В режиме отработки по контуру (все элементы схемы работают циклически с ПОСТОЯННЫ) частотой щосла) блок 5 организует подключение блока 2 к интерполятору 4, выход текущих координат которого подключается ко второму входу коммутатора 6. Первый вход коммутатора при этом отключен от блока 2. Поступающая последовательность импульсов текущих координат, число которых оНределяет перемещение, а частота следования - скорость подач, в сумматоре 14 сравнивается с кодом, вьщаваемым датчиком 15. При равенстве их значений сигнал на выходе цифроаналогового преобразователя равен нулю, а управляющий сигнал на привод 10 постугсает от интерполятора 4 через блок 8 и преобразователь 9. Рассогласова1ше между показаниями датчика 15и информацией, поступающей с интерполятора 4, выявленное в случае возникновения ощибки сумматором 14, поступает через преобразователь 16 на вход привода 10, вызывая при этом допол1штельное воздействие, устраняющее (уменьшающее) рассогласование. Блок 17 фиксирует момент перехода усилительного тракта привода 10 в режим по .каждой координате и по мере того, как приближается этот режим, оно выдает сиг-. нал на соответствующие входы элемента ИЛИ 18. Сигнал с выхода элемента ИЛИ 18 поступает на второй вход генератора 7 и прекращает дальнейшее поступление импульсов на вход интерполятора 4 до тех пор, пока уровень сигнала в усилительном тракте не снизится до уровня, соответствующего линей ной зоне. Таким образом, в момент разгснш с увеличением ошибки до уровня, обуславливающе го переход усилителя в режим насыщения хотя бы в одном из каналов, происходит откпюэдние генератора 7 и прекращение интерполяции. А поскольку все элементы схем работают циклически, отработка просуммированной в предыдущих циклах в сумматоре 11 информации продолжается, постоянство соотнощения по входному воздействию не наруигается, следовательно, соотношение скоростей между отдельными координатами системы поддерживается ПОЁТОЯНИЬПМ, результирующий ксипур отрабатывается с то шостью I заданной программой. По мере нарастания скорости в режиме разгона тахометрическая отрицательная обратная связь в следящем приводе начинает оказывать регулнр) воздействие, исключая переход усилительного в режим яясыщения. При работе усилительного тракта в линейной зоне пороговые элемента блока 17 не срабатывают и с генератора 7 импульсы, частота которых изменяется блоком 3, постоянно поступают на интерполятор 4. В режиме позиционной отработки, например холостые ходы ийи перемещение вдоль одной из координат, блок 5 отключает интерполятор 4 от блока 2, подключает первый вход коммутатора 6 к выходу блока 2. Сумматор 14 вычисляет ве №чину рас,согласования между заданным значением отработки и действительным, определяемым датчиком 15. Полученная таким образом величина отработки через преобразователь 13 поступает на двигатель. Сигнал на выходе преобразователя 9 при этом равен нулю. Использование блока координатных пороговых элементов и элементов ИЛИ в системах для отработки координатных перемещений позволяет сократить на 15-20% длительность переходного процесса, так. как становится возможным повыснть скорость нарастания частоты импульсов, вьщаваемых с генератора на интертолятор. Увеличение частоты я1особствует повыщению скорости в переходнсйи режиме, а предотвращение режима тамаитя усжлителей позволяет сохранить точность отработки результирующего контура, заданную программой. Формула из об р е т е н и я Устройство для комбинированного числового рограммного управления по авт.св. № 485419, т л и ч а ю щ е е с я тем, что, с целью повышения го быстродействия, в него введены последоваельно соединенные блок координат1а 1Х пороовых элементов, подключенный входами к ыходам следящего привода, и элемент ИЛИ, одсоединенньш выходом к второму вхо енератора яыпульсов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР. №485419, л. G 05 В 19/18, 1973 (прототип).
