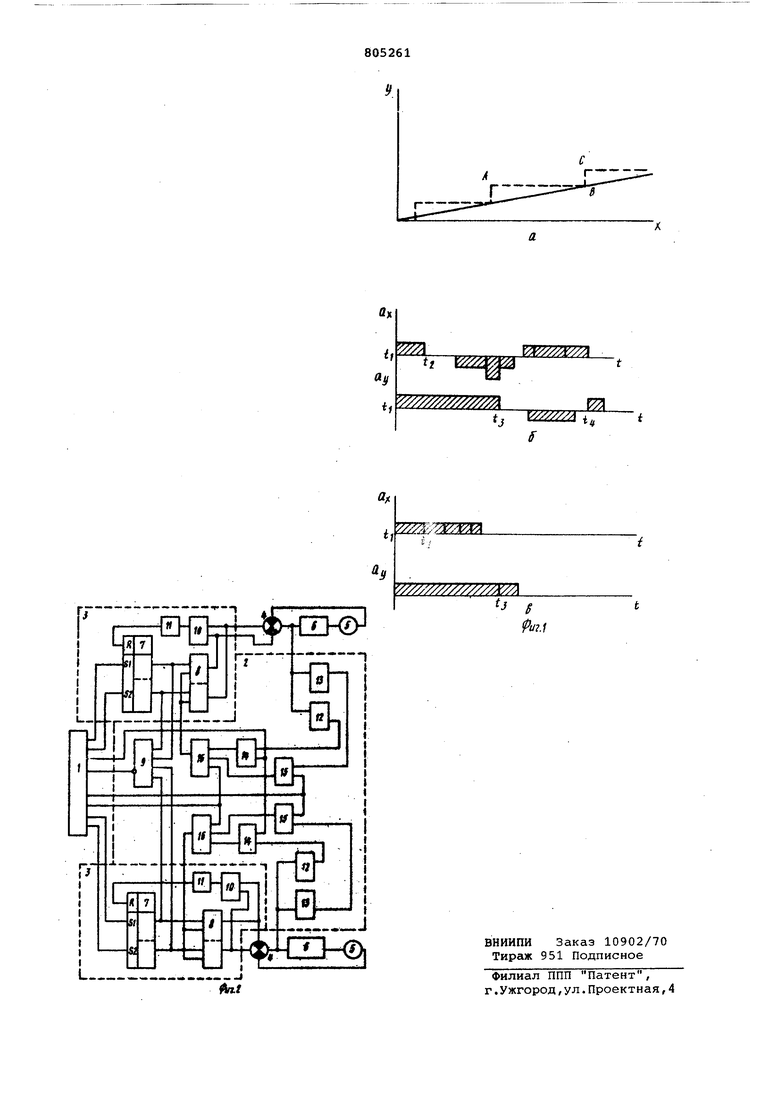
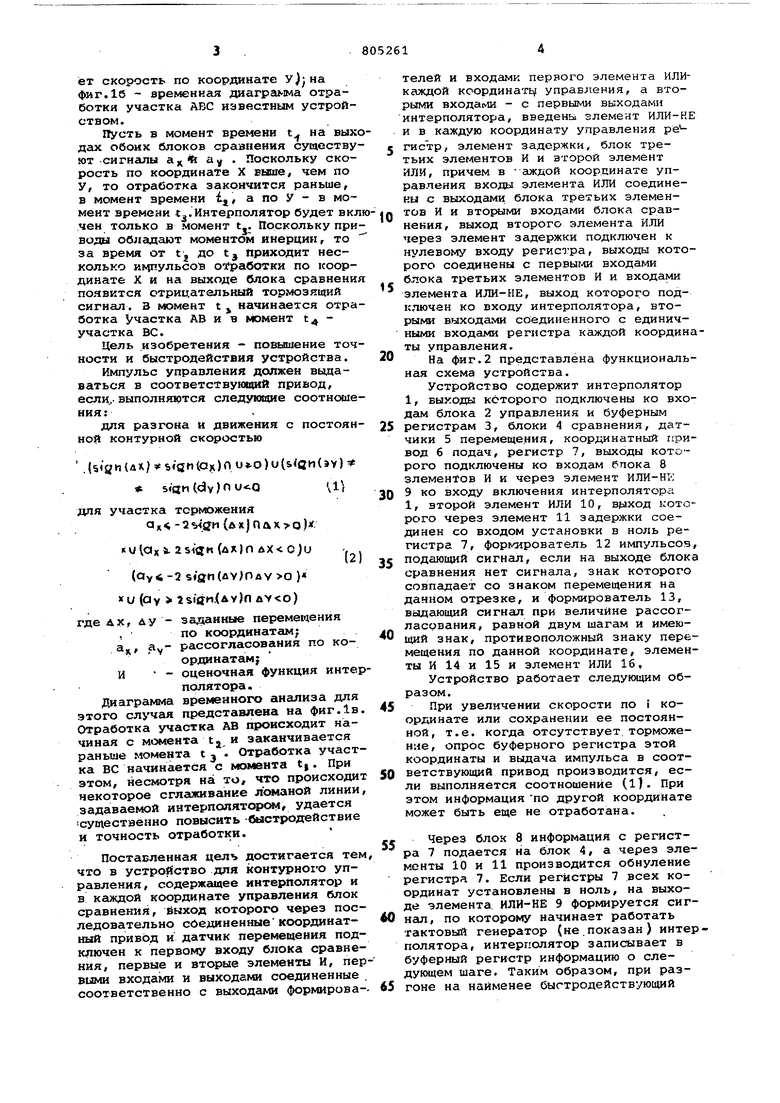
(54) УСТРОЙСТВО ДЛЯ КОНТУРНОГО ПРОГРАММНОГО УПРАВЛЕНИЯ ёт скорость по координате yjj на фиг.1б временнёш диаграмма отработки участка ABC известным устройством. Пусть в момент времени t. на вых дах обоих блоков сравнения существу ют сигналы а X «и а у . Поскольку скорость по координате X sasa&, чем по У, то отработка закончится раньше, в момент времени i, а по У - в момент времени «.Интерполятор будет вкл чен только в момент t,. Поскольку при вады обладают моментом инерции, то за время от tj до tj приходит несколько иьр ульсо5 обработки по координате X и на выходе блока сравнени появится отрицательный тормозящий сигнал. В момент t начинается отра ботка Участка АВ и в Момент t участка ВС. Цель изобретения - повышение точ ности и быстродействия устройства. Импульс управления должен выдаваться в соответствующий привод, еслИ:.- выполняются следующие соотноше ния: для разгона и движения с постоян ной контурной скоростью .(5«ЦИ(ДИ)(ах)П U.O)U((5Y) 5«ап (сЗу) vl( для участка торможения ОхЧ-2 4 и {лх)) «ulOx i. ZsidK (лх)п лх cju (Qyi -2 51йП(ДУ)ПдУ О )« «и (QY isijjn.(Av)n ) где АХ, ду - заданные перемещения по координатам; а v рассогласования по коордо1натам;И - оценочная функция инте полятора. Диагракада временного анализа для этого случая представлена на фиг.1в Отработка участка АВ происходит начиная с момента tj и заканчивается раньше момента t j . Отработка участ ка ВС начинается с момента t|. При этом, несмотря на то, что происходи некоторое сглаживание ломаной линии задаваемой интерполяторе, удается существенно повысить &астродействие и точность отработки. Поставленная цель достигается тем что в устройство для контурногО управления, содержащее интерполятор и в каждой координате управления блок сравнения, ёыход которого через последовательно соединенные координатный привод и датчик перемещения подключен к первому входу блока сравнения, первые и вторые элементы И, пер выми входами и выходами соединенные соответственно с выходгиии формирователей и входами первого элемента ИЛИкаждой ксординатц управления, а вторыми входас 1и - с первыми выходами интерполятора, введены элемент ИЛИ-КЕ и в каждую координату управления рё гистр, элемент задержки, блок третьих элементов И и второй элемент ИЛИ, причем в - аждой координате управления входы элемента ИЛИ соединены с выходами блока третьих элементов И и вторыми входами блока сравнения, выход второго элемента ИЛИ через элемент задержки подключен к нулевому входу регистра, выходы которого соединены с первыг ш входами блока третьих элементов И и входами элемента ИЛИ-НЕ, выход которого подключай ко входу интерполятора, вторыми выходами соединенного с единичными входами регистра каждой координаты управления. На фиг.2 представлена функциональная схема устройства. Устройство содержит интерполятор 1, выходы которого подключены ко входам блока 2 управления и буферным регистрам 3, блоки 4 сравнения, датчики 5 перемещения, координатный иривод 6 подач, регистр 7, выходы которого подключены ко входам бпока 8 элементов И и через элемент ИЛИ-НК 9 ко входу включения интерполятора 1, второй элемент ИЛИ 10, выход которого через элемент 11 задержки соединен со входом установки в ноль регистра 7, фop a poвaтeль 12 импульсов, подающий сигнал, если на выходе блока сравнения нет сигнала, знак которого совпадает со знаком перемещения на данном отрезке, и формирователь 13, выдаюишй сигнал при величине рассогласования, равной двум шагам и имеющий знак, противоположный знаку перемещения по данной координате, элементы И 14 и 15 и элемент ИЛИ 16, Устройство работает следующим образом. При увеличении скорости по i координате или сохранении ее постоянной, т.е. когда отсутствует торможение, опрос буферного регистра этой координаты и выдача импульса в соответствующий привод производится, если выполняется соотношение (1). При этом информация по другой координате может быть еще не отработана. Через блок 8 информация с региста 7 подается на блок 4, а через элеенты 10 и 11 производится обнуление егистра 7. Если регистры 7 всех кординат установлены в ноль, на выхое элемента ИЛИ-НЕ 9 формируется сигал, по которому начинает работать актовый генератор (не показан интеролятора, интерполятор записывает в уферный регистр информацию о слеующем шаге. Таким образом, при разгоне на наименее быстродействующий
привод почти все время подается максимальное управляющее воздействие.
После достижения приводом требуемой скорости частота поступления управляющих импульсов с интерполятора определяется уже не свойствами привода, а равма максимальной частоте тактового генератора, которая задается программно и определяется из допустимой скорости обработки на Данном участке. Здесь регистры 7 за исключением времени задержки злемента 4 обнулены, и интерполятор все время работает, а информация с его выходов сразу же проходит на блоки сравнения так как к моменту выдачи сигнала импульс опроса уже присутствует.
Здесь, так же как и при разгоне, наличие буферных регистров позволяет осуществить ввод в блок 4 информгщий о новом шаге при отработке предыдущего шага только по данной координате, сохраняя ттри этом жесткое соотношение между координатс1ми.
При необходимости снижения скорости интерполятор вьщает сигнал торможения, поступающий на входы ячеек 15 иснимает сигнал с ячеек 14. В этом случае информация с регистра 7 на вход i блока 4 подается, если выполняется условие (2). Тогда на выходе блока 4 сравнения наиболее инерционного привода будет постоянно поддерживаться сигнал, обеспечивающий режим торможения. Так происходит до момента достижения рабочим органом минимальной скорости. В этом случае время между импульсами опроса превысит заданное максимально допустимое и интерполятор вьщает сигнал, передающий информацию с регистров 7 на блоки 4 сравнения, а в регистры 7 запишет информацию о следующем шаге.
Следовательно, при движении с минимальной скоростью интерполятор практически напрямую соединен с блоками 4. При этом в отличие от известного устройства значительно уменьшается вероятность опережения в отдельные моменты времени программы отработкой, что снижает контурную погрешность и время отработки.
Формула изобретения
Устройство для контурного программного управления, содержащее интерполятор и в каждой координате управления блок сравнения, выход которого через последовательйо соединенные координатный привод и датчик перемещения подключен к первому входу блока сравнения, первые и вторые элементы И, первыми входами и выходами соединенные соответственно
5 с выходами формирователей и входами первого элемента ИЛИ каждой координаты управления, а вторыми входами с первыми выходами интерполятора, отличающееся тем, что, с целью повышения быстродействия
0 и точности устройства, в него введены элемент ИЛИ-НЕ и в каждую координату управления регистр, элемент задержки , блок третьих элементов И и о второй элемент ИЛИ, причем в каждой
f координате управления входы элемента ИЛИ соединены с выходами блока третьих элементов И и вторыми входами блока сравнения, выход второго элемента ИЛИ через элемент задержки
0 подключен к нулевому вхрду регистра, выходы которого соединены с первыми входами блока третьих элементов И и входами элемента ИЛИ-НЕ, выход которого подключен ко входу интерполято5ра, вторыми выходами соединенного с .единичными входами регистра каждой координаты управления.
л
Источники информации, принятые во внимание при экспертизе
0
1.Авторское свидетельство СССР № 395807, кл. G 05 В 19/04, 1971.
2.Авторское свидетельство СССР №563668, кл. 05 В 19/24, 1976 (прототип). У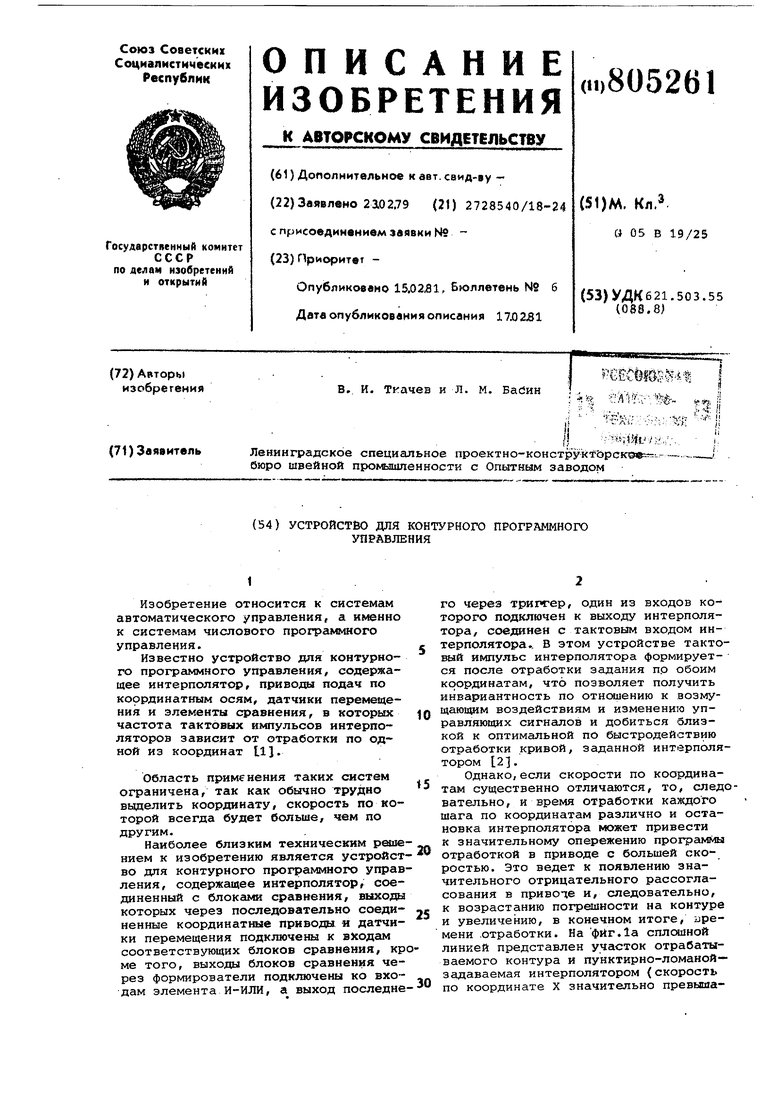
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Цифровой линейный интерполятор | 1986 |
|
SU1310779A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Устройство для стабилизации скорости подачи в станках с программным управлением | 1985 |
|
SU1325411A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |