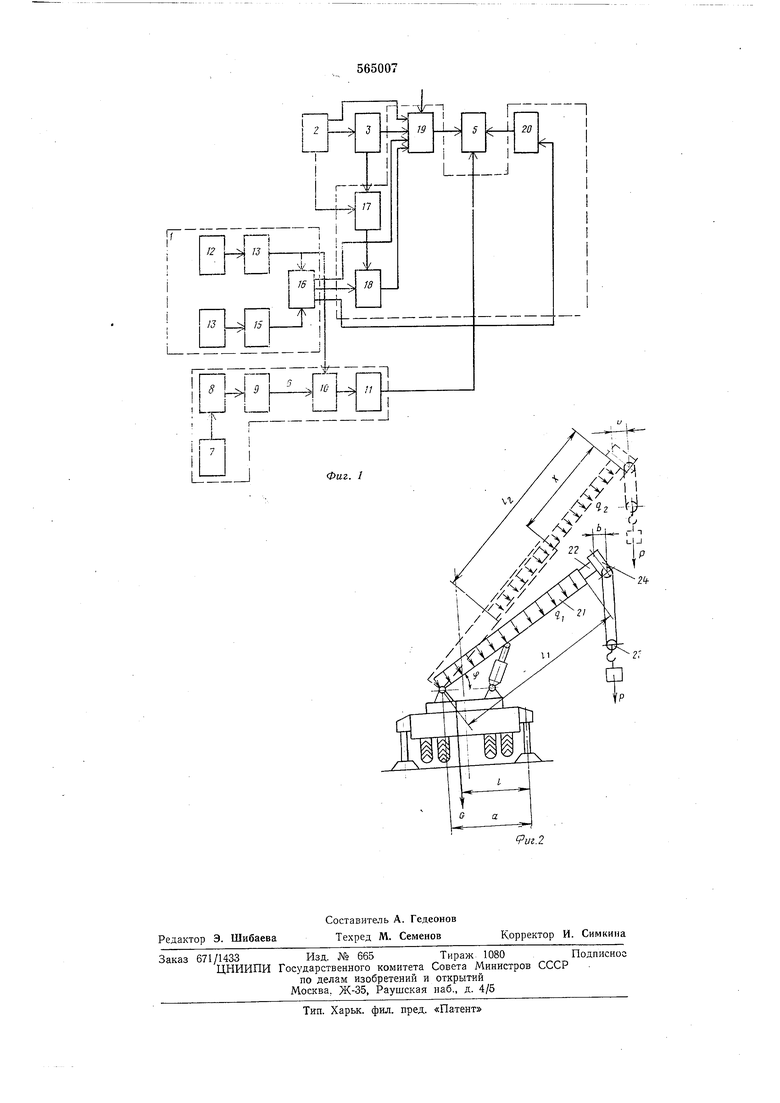
образования механического усилия в электрический сигнал подключен ко входу ключа. На фиг. 1 приведена функциональная схема ограничителя грузоподъемности для кранов с телескопической стрелой; на фиг. 2 - схема .-нагрузок, действующих на кран. Ограничитель грузоподъемности для кранов с телескопической стрелой содержит узел J преобразования механических усилий в электрический сигнал, преобразователь 2 угла наклона стрелы, преобразователь 3 длины стрелы, вычислительный узел 4 и схему 5 сравнения. Ограничитель снабжен узлом 6 предельного состояния крана, состоящим .из последовательно включенных блока 7 входа сигналов преобразователей ветровой нагрузки и крена, фазовращателя 8, ждущего мультивибратора 9, схемы W совпадения и ждущего мультивибратора // расщйрения импульсов, причем узел 7 преобразования механических усилий в электрический сигнал состоит «з силоизмерителя 12 и фазовращателя }3, подключенных через формирователи 14, 15 последовательности импульсов к схеме 16 совпадения, а вычислительный узел 4 состоит из последовательно включенных сумматора 17 вылета стрелы, ключа 18 и сумматора 19 опрокидывающего момента крана, а также сумматора 20 восстанавливающего момента крана. Выходы сумматора 19 и сумматора 20 подключены к схеме 5 сравнения. Выходы преобразователя 2, преобразователя 3 и схемы 16 соединены со входом сумматора 19. Выход преобразователя 2 соединен со входом сумматора 17 и входом преобразователя 3, а выход схемы 16 подключен ко входу ключа 18. На чертеже также изображены основная секция 21, выдвижная секция 22, крюк 23 с оголов сом 24 и щарнир 25 стрелы. Ограничитель грузоподъемности крана с телескопической стрелой ра.ботает следующим образом. Ограничитель грузоподъемности непрерывно контролирует неравенство статического равновесия краиа, в котором левая часть соответствует величине опрокидывающего момента, а правая - величине восстанавливающего момента. А cos f + S JC cos ср + Р(/2 + -) cos ср + + + Р-а(1 причем / + q,ll . В q.,l,; А- 2 С (qzk + qili) а; . I; Е С + D, где (7i и 2 - распределение веса соответственно основной 21 и выдвижной 22 секций стрелы; длины основной 21 и выдвижной 22 секций стрелы; длина телескопического выдвижения;вес крюка 23 с оголовком 24 и грузом; вес крана без стрелы; расстояние центра тяжести крана (без стрелы) до ребра опрокидывания; расстояние от шарнира 25 стрелы до ребра опрокидывания;угол наклона стрелы; длина оголовка 24. В предложенном ограничителе грузоподъемности в узле преобразования механических усилий в электрический сигнал применяется в качестве силоизмерителя 12 магнитоупругий элемент, например дроссель, с выходом по фазе, который обладает стабильным коэффициентом передачи. Под действием силы Р на выходе силоизмерителя 12 происходит сдвиг фазы относительно начальной фазы, установленной фазовращателем 13. Разность начальной и конечной фаз эквивалентна величине силы Р. Сигналы с силоизмерителя 12 и фазовращателя /5 через формирователи 14 и 15 последовательности импульсов поступают на схему 16 совпадения. На выходе схемы 16 совпадения получаем широтно-модулированную последовательность прямоугольных импульсов, длительность которых пропорциональна усилию Р. С выхода схемы 16 совпадения сигнал поступает на ключ 9-вычислительного узла 4. Преобразователь 2 угла еаклона стрелы при повороте стрелы на угол ф выдает напряжение пропорциональное /2 cos ф. Преобразователь 3 длины стрелы при выдвижении стрелы на величину х выдает напряжение пропорциональное .г cos ф. Сигналы с преобразователей 2 и 5 поступают на вход сумматора /7 вылета стрелы, на выходе которого получаем напряжение, пропорциональное (/з Н-.г) cos ф. Напряжение, пропорциональное (Iz+x) cos ф, поступает на ключ 9, который управляется напряжением выхода схемы 16 совпадения узла преобразования механических усилий в электрический сигнал. На выходе ключа 9 получаем произведение P(l2 + x) cos ф, т. е. величину опрокидывающего момента крана от действия силы Р, входящую в левую часть неравенства (1). С ключа 9 сигнал подается на сумматор 19 опрокидывающего момента крана, на который поступают сигналы с преобразователей 2, 3, при этом указанные сигналы пропорциональны опрокидывающему моменту от веса стрелового оборудования (соответственно А cos ф и В X cos ф). Кроме того, на сумматор 19 поступает сигнал со схемы 16, где он умножается на длину оголовка (Ь). Таким образом, на выходе сумматора 19 получаем сигнал, лропорциональный полной величине опрокидывающего момента кра.на, представляющей собой левую часть неравенства (1).
В сумматоре 20 восстанавливающего момента крана осуществляется умножение усиЛИЯ Р на величину расстояния от щарнира стрелы до ребра опрокидывания и сложение произведения Р а с заданной величиной Е, таким образом ла выходе сумматора 20 сигнал пропорционален восстанавливающему моменту (правой части неравенства (1).
В схеме 5 сравнения происходит сравнение сигналов сумматора 19 опрокидывающего момента крана и сумматора 20 восстаяавлиБающего момента крана. При равенстве указанных сигналов схема 5 Сравнения включает предохранительное устройство, залрещающее работу крана (на чертеже не локаза«о).
Для защиты крана от подъема груза, превыщающего вес допустимого груза, или для защиты от лревыщающих против допустимых значений ветровой нагрузки и крена в схему ограничителя вводится )зел 6 предельного состояния крана. Величина предельно-допускаемого груза Р устанавливается фазовращателем 8. Сигнал с фазовращателя 8 через ждущий мультивибратор 9 поступает на схему 10 совпадения, на которую также сигнал со входа схемы 16 совпадения узла / преобразования механических Зсилий в электрический сигнал. При равенстве действующей и П|редельно-долускаемой «агрузок на выходе схемы W совпадения узла 6 предельного состояния крана появляется напряжение, запускающее ждущий мультивибратор 11 расширения импульсов. Напряжение последнего включает схему 5 сравнения, а следовательно и предохранительное устройство, запрещающее работу крана. Аналогично работает ограничитель и, при предельных значениях ветровой нагрузки и крена, поступающих на вход блока 7 входа сигналов преобразователей ветровой нагрузки и крена.
Формула изобретения
Ограничитель грузоподъемности для кра:нов с телескопической стрелой, содержащий
узел преобразования механических усилии в электрический сигнал, преобразователь угла наклона стрелы, преобразователь длины стрелы, вычислительный узел и схему сравнения, отличающийся тем, что, с целью упрощения устройства и повышения надежности, точности срабатывания и безопасности работы крана, он снабжен узлом предельного состояния крана, состоящим из последовательно включенных блока входа сигналов преобразователей ветровой нагрузки и крена, фазовращателя, ждущего мультивибратора, схемы совпадения и л дущего мультивибратора расщирения импульсов, причем узел преобразования механических усилий в электрический сигнал состоит из силоизмерителя и фазовращателя, подключенных через формирователи последовательности импульсов к схеме совпадения, а вычислительный узел состоит из последовательно включенных сумматора вылета стрелы, ключа и сумматора опрокидывающего момента крана, а также сумматора восстанавливающего момента крана, при этом выходы сумматора опрокидывающего момента крана, ждущего мультивибратора расширения импульсов и сумматора восстанавливающего момента крана подключены к схеме сравнения, выхода преобразователя угла наклона стрелы, преобразователя длины стрелы и схемы совпадения узла преобразования механических усилий в электрический сигнал подключены ко входу сумматора опрокидывающего момента крана, вход схемы совпадения узла преобразования механических усилий в электрический сигнал соединен со входом схемы совпадения узла предельного состояния кра-на, выход преобразователя угла наклона стрелы соединен со входом сумматора вылета стрелы и входом преобразователя длины стрелы, а выход схемы совпадения узла преобразования механического усилия в электрический сигнал подключен ко входу ключа.
Источники информации, принятые во внимание при экспертизе:
1.Патент ФРГ № 1810639, кл. 35 В 23/90, 1972.
2.Патент ФРГ № 1935791, кл. 35 В 23/90, 1973.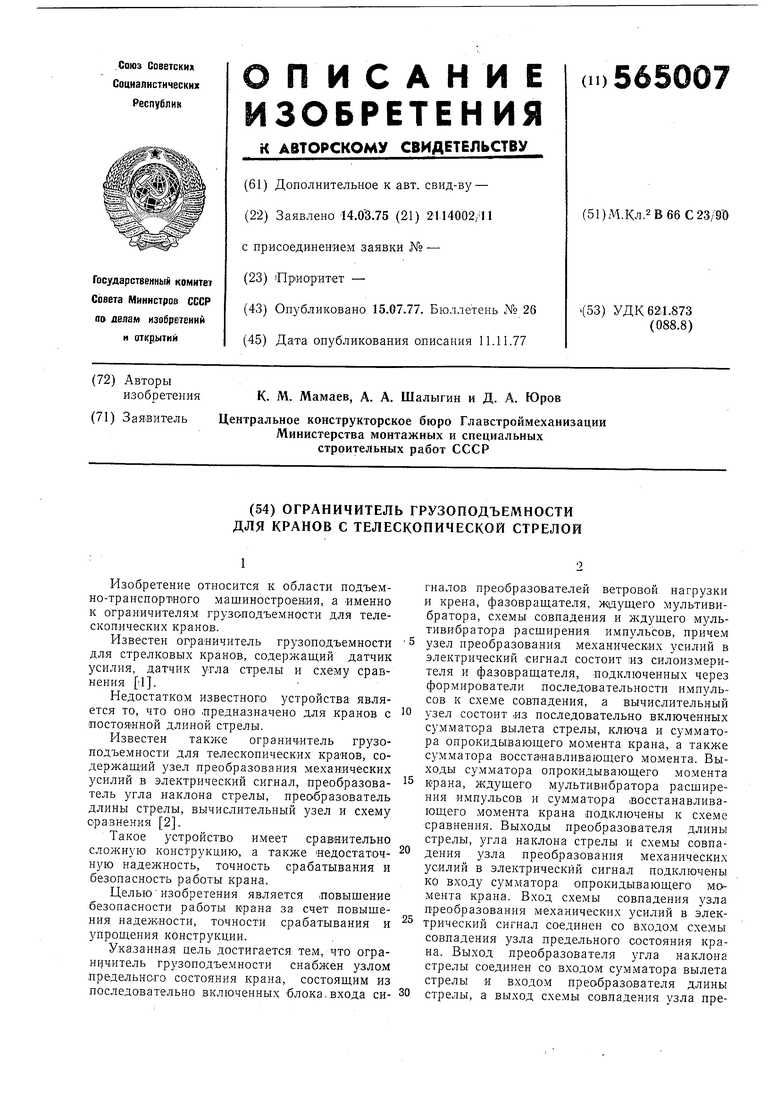
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737353A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ АВТОКРАНА ОТ ОПРОКИДЫВАНИЯ И ПЕРЕГРУЗОК С УПРАВЛЕНИЕМ СКОРОСТЯМИ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500608C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| Ограничитель грузоподъемности стрелового крана | 1981 |
|
SU979268A1 |
| Ограничитель грузоподъемности стрелового крана | 1990 |
|
SU1805094A1 |
| Ограничитель грузоподъемности стрелового крана | 1980 |
|
SU992406A1 |
| Ограничитель грузоподъемности стрелового крана | 1983 |
|
SU1174370A1 |