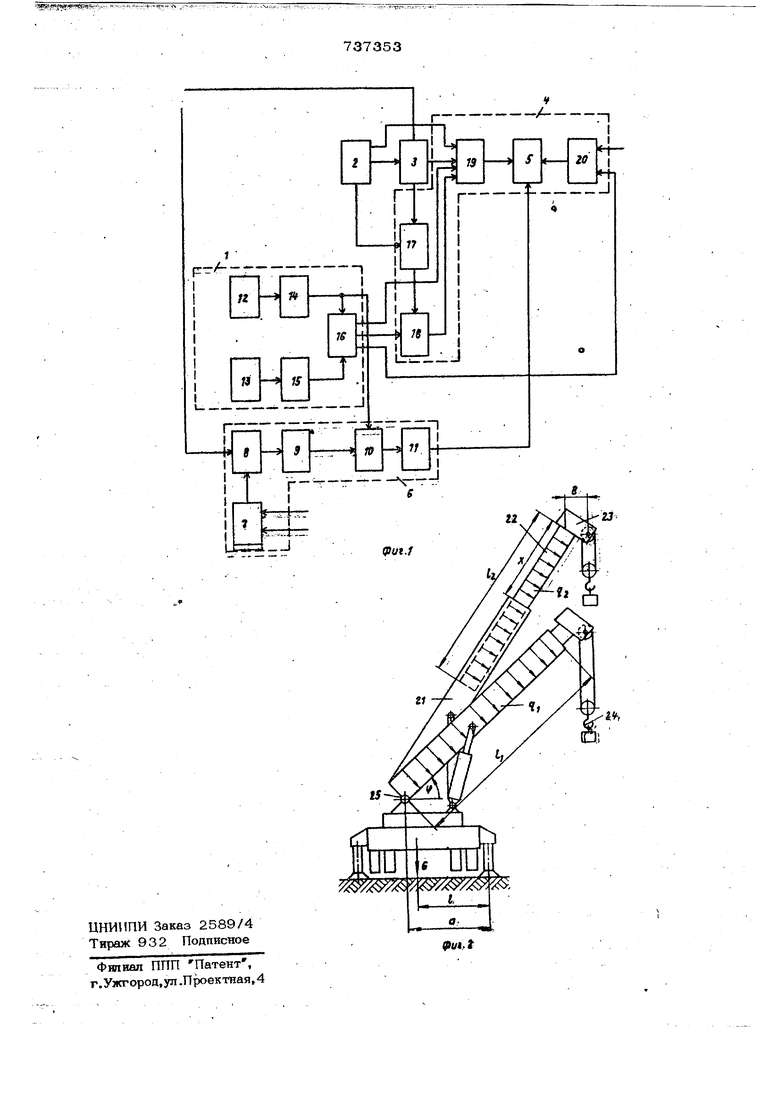
Ограничитель грузоподъемности для кранов с телескопической стрелой содержит узел Г преобразования механических усилий в электрический сигнал, преобразователь 2 угла наклона стрелы, преобра зователь 3 длины стрелы, вычислительны узел 4, схему 5 сроэнения и узел 6 предельного.состояния крана. Узел б предельного состояния крана состоит из последовательно включенных блока 7 входа сигналов преобразователей ветровой нагрузки и крана, фазовращатели 8, подключенного входом к преобразователю 3 длины стрелы, ждущего мультивибратора 9, схемы 10 совпадения и ждущего мультивибратора 11 расширения импульсов. Узел 1 преобразования ; механических усилий в Электрический сигнал состоит из силоизмерителя 12 и фазовращателя 13, подключенных, через формирователи 14 и 15 последовательности импульсов к схеме 16 совпадения.- . Вычислительный узел 4 состоит из по следовательно включенных сумматора 17 вылета стрелы, клю.ча 18 и сумматора 19 опрокидывающего момента крана, а также сумматора 20 восстанавливающего момента крана. Выходы сумматора 19 опрокидывающего момента крана, ждущего мультивибратора 11 расширения импульсов и сумматора 20 восстанавливаю щего момента крана подключены к схеме 5 сравнения, Выходы преобразователя 2 угла накло на стрелы, преобразователя 3 длины стрелы и схемы 16 совпадения узла 1 преобразования механическшс усилий в электрический сигнал подключены ко входу сумматора 19 опрокидьшающего момента крана, а вход схемы 16 совпадения соединен с входом схемы 10 совпадения узла 6 предельного состояния крана. Выход преобразователя iSS угла наклона стрелы соединен с входом сумматора 17 вылета стрелы и входом преобразователя 3 длины стрелы, а выход схемы 16 совпадения узла преобразования механических усилий в электрический сигнал подключен к входу ключа 18. На фиг. 3 изображены основная секция 21 стрелы, выдвижная секция 22, оголоБОК 23, крюк 24 и шарнир 25 стрелы. Ограничитель грузоподъемности крана с телескопической стрелой работает еледующим образом. Ограничитель грузоподъемности нёпрерывно контролирует неравенство статичесго равновесия Klsana, в котором левая асть соответствует величине опрокидыающего момента, а правая - величине осстанавливающего момента: -созЧ Вхсоз РСе +х созЧ- -РЪ , И ) (,)а, D-Q-e; ) о, и л - распределение веса соответ- ственно основной 21 и выдвижной 22 секций стрелы; X - длина телескопического выдвижения5,. и 8 - длины основной 21 и выдвижной 22 секций стрелы; Р - вес крюка 24 с оголовком 23 и грузом; G - вес крана без стрелы - расстояние центра тяжести jcpaHa до ребра опрокидьтания; О - расстояние от шарнира 25 стрелы до ребра опрокидыва ния; Ч - угол наклона стрелы; t) - длина оголовка ,23 стрелы. В предложенном ограничителе грузоодъемности в узле 1 преобразования меанических усилий в электрический сигнал рименяется в качестве силоизмерителя 2 магнитоупругий элемент, например россель с выходом по фазе, который обадает стабильным коэффициентом переачи. Перед действием силы Р на выходе илоизмерителя 12 происходит сдвиг фазы относительно начальной фазы, установленной фазовращателем 13. Разность на- чальной и конечной фаз эквивалентна величине силы Р . Сигналы с силоизмерителя 12 и фазовращателя 13 через формирователи 14 к 15 последовательности импульсов поступают на схему 16 совпадения. На выходе схемы 16 совпадения получаем 1 иротно модугчрованную после доэательность прямоугольных импульсов, длительность которых пропорциональна усилию f . С выхода схемы 16 совпадения сигнал поступает на ключ 18 вычислительно узла 4. Преобразователь 2 угла наклонп стрелы при повороте стрелы .на угол Ч вышает напряжение, пропорциональное вели1чине &2COS4Преобразователь 3 длины стрелы при выдвижении стрелы на величину X выдает напряжение, пропорциональное величине Х.соэЧ,Сигналы с преобразователей 2 и 3 поступают на вход-сумматора 17 вылета стрелы; на выходе которого получаем напряжение, пропорциональное величине ( 2 )созЧ , поступающее на ключ 18, который управляется напряжением с вькода схемы 16 совпадения узла 1 преобразования механических усилий в-элек- трический сигнал. На выходе ключа 18 получаем произведение Р { 2 +Х ), т. е« величину опрокидьгоающего момента крана от действия силы Р , входящую в левую часть неравенства ( 1). С ключа 18 сигнал подается на сумматор 19 опрокидьгоающего момента крана, на который поступают сигналы с преобразователей 2 и 3 соответственно угла наклона стрелы и длины стрелы, при этом указанные сигналы пропорциональны опрокидывающему моменту от веса стрелового оборудования (соответственно BxcosM). Кроме того, на сумматор 19 опрокидьтающего момента крана поступает сигнал со схемы 16 совпадения узла 1 преобразования механических усилий в электрический сигнал, где он умножается на длину в оголовка. . Таким образом, на выходе сумматора 19 опрокидывающего момента крана получаем сигнал, пропорциональный полной величине опрокидьюающего момента крана, представляющей собой левую часть неравенства (1). В сумматоре 20 восстанавливающего момента крана осуществляется умножение усилия Р на величину расстояния О от щарнира 25 стрелы до ребра опрокидывания и сложение произведения Р d с заданной величиной t . Таким образом, на выходе сумматора 20 восстанавливающего момента сигнал п)опорционален восстанавливающему моменту крана;правая часть неравенства (1). В схеме 5 сравнения происходит сравнение сигналов сумматора 19 опрокидывающего момента крана и сумматора 20 восстанавливающего момента крана. При
равенстве указанных сигналов схема. 5 сравнения включает предохранительное устройство, запрещающее работу крана (на чертеже не показанд).
Для защиты крана от подъема груза, превышающего вес допустимого груза, служит узел 6 предельного состояния крана Величина предельного груза устанавливается автоматически фазовращателем
8, управляемым преобразователем 3 длины стрелы, т. е. величина предельного груза устанавливается в зависимости от изменения датины стрелы на минимальном вылете последнеС Таким образом, обес- печивается защита крана от перегрузки не только по моменту, но и по прочности стрелового оборудования крана, Электрическая схема узла 6 предельного состояния крана работает следующим образом. Сигнал с фазовращателя 8 через ждущий мультивибратор 9 поступает на схеМУ 10 совпадения, на которую тайже поступает сигнал с входа схемы 16 совпадения узла 1 преобразования механическихусилий в электрический сигнал. При равенстве действующей и предельной нагрузок на выходе схемы Ю совпадения узпа в предельного состояния крана пояЕДяется напряжение, запускающее ждущий мультивибратор 11 расширения импульсов. Напряжение последнего включает схему 5 сравнения, а следовательно,, и. предохранительное устройство, запрещаю™-®® работу крана. Аналогично работает ограничитель и при предельных значениях ветровой нагрузки и крана, поступающих на вход блока. 7 входа сигналов преобразователей ветровой нагрузки и крана Формула изобретения Ограничитель грузоподт емности для кранов с телескопической стрелой по авт. св. N9 565О07, отличающ и и с -я тем, что, с целью защиты к:рана от перегрузки по предельномз грусзу на вЬем диапазоне длин стрелы, преобразователь длины стрелы подключен к фазовращателю yorta предельного состо ния крана.
737353
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ АВТОКРАНА ОТ ОПРОКИДЫВАНИЯ И ПЕРЕГРУЗОК С УПРАВЛЕНИЕМ СКОРОСТЯМИ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500608C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| Ограничитель грузоподъемности стрелового крана | 1980 |
|
SU992406A1 |
| Ограничитель грузоподъемности стрелового крана | 1981 |
|
SU979268A1 |
| Ограничитель грузоподъемности стрелового крана | 1990 |
|
SU1805094A1 |
| СПОСОБ ФАЗИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ ЗАДАННОЙ ЧАСТОТЫ В ПРОСТРАНСТВЕННО РАЗНЕСЕННЫХ ЦЕНТРАЛЬНОМ И ОКОНЕЧНОМ ПУНКТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2057394C1 |
V ./
P
I HI
rJj
Г
1
F
;e :rrd.J
