(54) ГРЕЙДЕРНЫЙ НОЖ
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАВЕСКИ ГРЕЙДЕРА-ПЛАНИРОВЩИКАНА ТРАКТОР | 1970 |
|
SU268281A1 |
| Грейдерное навесное оборудование | 1985 |
|
SU1313966A1 |
| Планировщик | 1981 |
|
SU1030502A1 |
| Бульдозер | 1990 |
|
SU1749392A1 |
| Навесной террасер | 1960 |
|
SU134505A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2133317C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СРЕДСТВО ДЛЯ ПОЧВООБРАБОТКИ | 2013 |
|
RU2547921C1 |
| БУЛЬДОЗЕР | 2007 |
|
RU2372446C2 |
| Рабочий орган землеройно-транспортной машины | 1986 |
|
SU1444479A1 |
| Бульдозер | 1981 |
|
SU1004545A1 |

1
Изобретение относится к землеройным машинам, в частности к рабочим органам грейдеров.
Известен грейдерный нож, включающий поворотную раму с отвалом, механизм поворота отвала и регулируемые опоры 1.
Иаиболее близким техническим решением к предлагаемому является грейдерный нож„| содержащий поворотную раму с отвалом, механизм поворота отвала в плапе и регулируемые по высоте опоры со штангами, смонтированными на поворотной раме посредством вертикальных шарниров 2.
Недостатком известного грейдерного ножа является то, что при повороте отвала в плапе оиоры пе орпентируются в направлении движения и оставляют на новерхности грунта след значительной ширины и глубины.
Целью изобретения является повышение качества выполнения работ нутем автоматической ориентапии опор в направлепии движения грейдера при повороте отвала в плане.
Указанная пель достигается тем, что опоры кинематически связаны в плане между еобой и с осью поворота рамы с отвалом, причем кинематическая связь опор выполнена из цепиых передач, ведущие звездочки которых жестко з стаповлепы на осн поворота рамы, а ведомые - на штангах опор с возможностью
поворота вместе е ними и скольжения вдоль них.
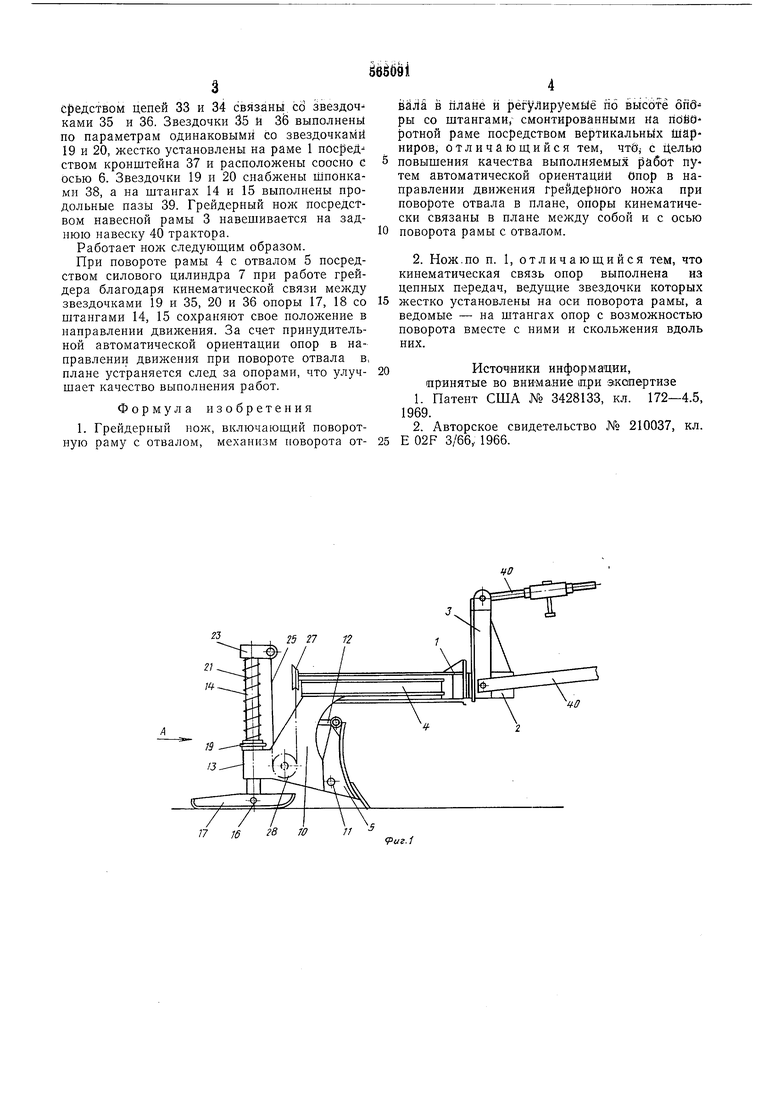
На фиг. 1 - изображен грейдерный нож, вид сбоку; на фиг. 2 - нож, вид сверху; на
фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - разрез Г-Г на фиг. 4.
Грейдерный нож состоит из рамы 1, установленный па подшипниковой опоре 2 навесной рамы 3, поворотной рамы 4 и отвала 5. Поворотная рама 4 соединена е рамой 1 осью 6. Внутри рамы 1 расноложен снловой цилиндр 7, соединенный через ось 8 с рамой 1, а через ось 9 - с поворотной рамой 4. На
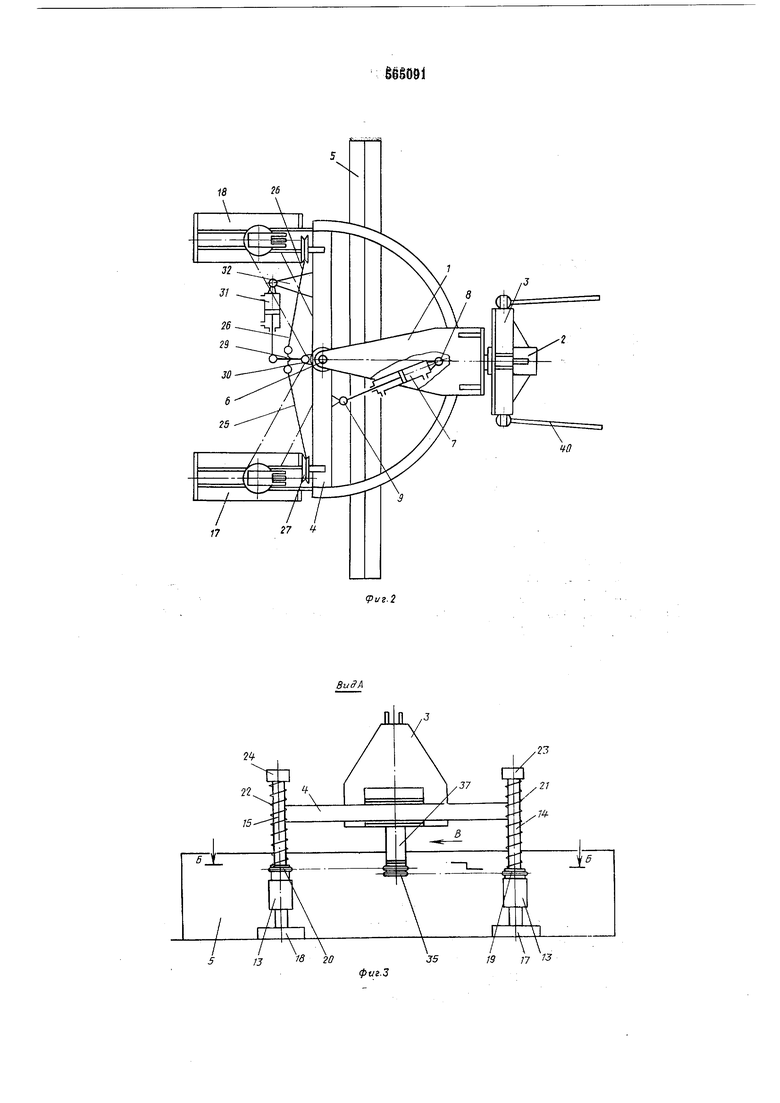
кронштейне 10 поворотной рамы 4 посредством оси 11 установлен отвал 5. Угол резания отвала 5 регулируется винтом 12. На опорах 13 кронштейнов 10 расположены выдвижные штанги 14 и 15. На нижнем коице штанг шарнирно сооединены поередством оси 16 опоры 17 и 18. На штангах с верхней стороны опор 13 установлены звездочки 19 и 20 и иружины 21 и 22. На верхнем конце штанг жестко установлены крогпнтейны 23 и 24. Кронштейны
носредством тросов 25 н 26, перекинутых через блокн 27 н 28, соединены рычагом 29. Рычаг установлен шарнирно на раме 4 на кронштейне 30 и поворачиваетея посредством силового цилиндра 31, зстановленного на раме
4 на кронштейне 32. Звездочки 19 и 20 посредством цепей 33 и 34 связаны Ы звездочками 35 и 36. Звездочки 35 и Зё выполнены по параметрам одинаковыми со звездочками 19 и 20, жестко установлены на раме 1 пос{ЗеДством кронштейна 37 и расположены соосно с осью 6. Звездочки 19 п 20 снабжены Шпонками 38, а на штангах 14 и 15 выполнены продольные пазы 39. Грейдерный нож посредством навесной рамы 3 навешивается на заднюю навеску 40 трактора.
Работает нож следуюш,им образом.
При повороте рамы 4 с отвалом 5 посредством силового цилиндра 7 при работе грейдера благодаря кинематической связи между звездочками 19 и 35, 20 и 36 опоры 17, 18 со штангами 14, 15 сохраняют свое ноложение в иаправлении движения. За счет принудительной автоматической ориентации опор в направлении движения при повороте отвала в, плане устраняется след за онорами, что улучшает качество выполнения работ.
Формула изобретения
и J6 28 70Л
ёаЛй в плане и регулируемые по вУсбтё бпб ры со штангами, смонтированными На ridgdротной раме посредством вертикальных Шарниров, отличаюш,ийся тем, чти,- с Целью повышения качества выполняемых работ путем автоматической ориентации опор в направлении движения грейдерного ножа при повороте отвала в плане, опоры кинематически связаны в плане между собой и с осью поворота рамы с отвалом.
Источ-ники информации,
принятые во внимание три экспертизе
РигЛ
241
3
I Л
23
19 17 -
J5
фиг.З
S-Б noSepHffmf
15
Т
38
(риг.Ч
35
фиг. 5
r-r
Ц
