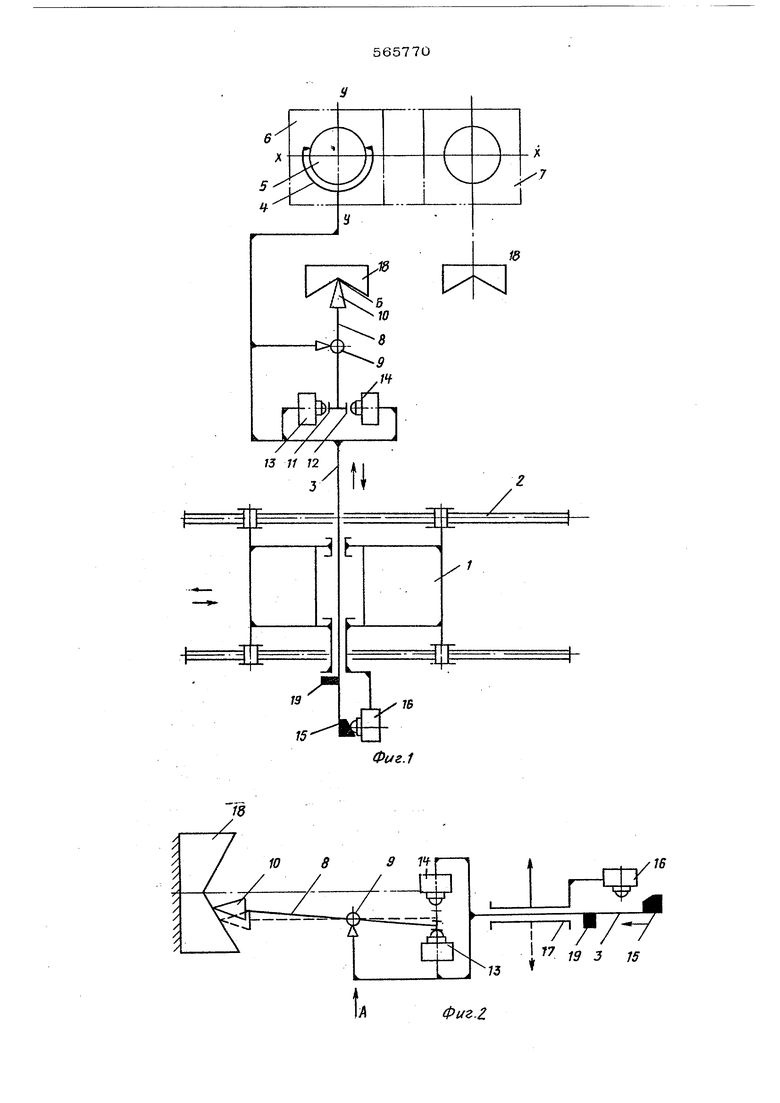
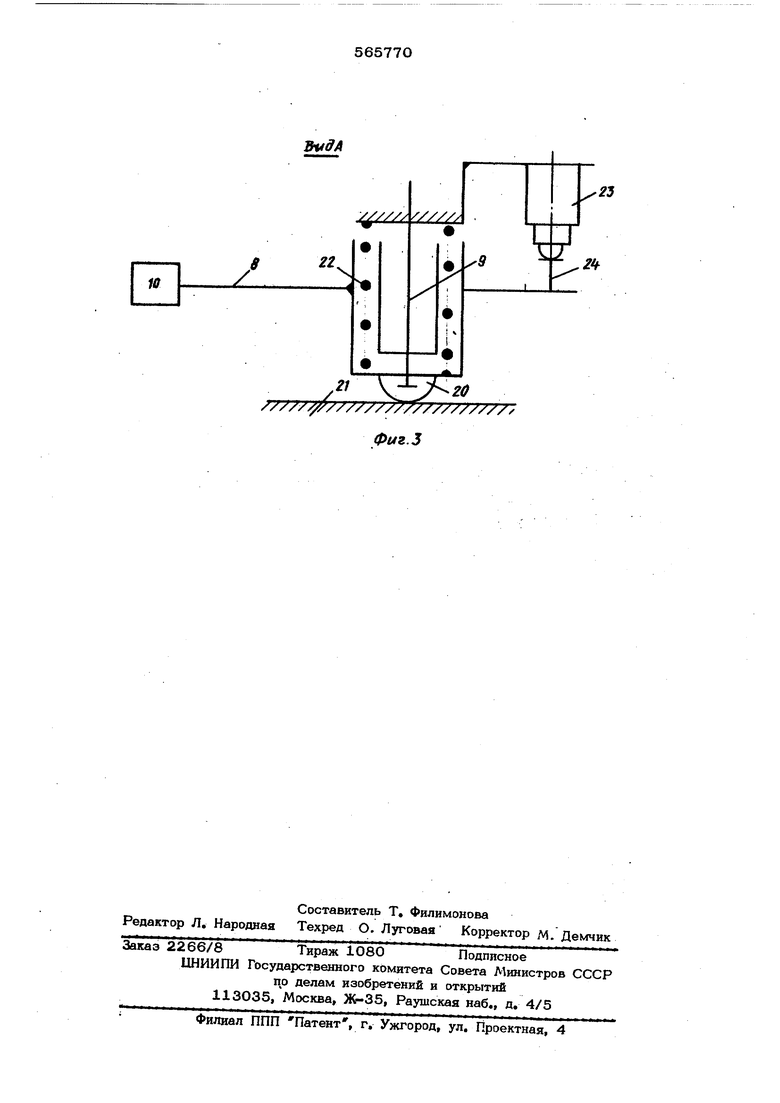
Изобретение относится к вспомогатель ному оборудованию кузнечно прессовых , а именно к прессовым манипуляторам. Известен манипулятор к прессу, содержащий приводную тележку со смонтированными на ней хоботом с захватом, механизмами его перемещения и системой управле)1ия . Цель изобретения - повысить производительность за счет обеспечения ориентации хобота по трем осям относительно ручья штампа. Это достигается тем, что предлагаемый манипулятор снабжен механизмом ориентации хобота, выполненным в виде двуплечего рычага, шарнирно смонтированного на хоботе и несущего на одном конце со стороны захва а следящий элемент, на другом конце три упора, два из которых расположены аметрально в горизонтальной плоскости, а третий - в вертикальной, а также смонтированных на хоботе контактов, взаимодействук щих с упорами двуплечего рычага и электри чески связанных с системой управления, при этом на нерабочем торце хобота смонтирова упор, взаимодействующий с индивидуал1.ьым контактом, установленным на приводной тележке и электрически связанным с системой управления. На фиг, 1 показан манипулятор, общий вид; на фиг. 2 - схема, поясняющая прип цип ориентации хобота манипулятора относительно ручья штампа в процессе работьц на фиг, 3 - вид по стрелке А на фиг. 2. Манипулятор содержит приводную тележку 1, перемещающуюся по рельсам 2, хобот 3 с захватом 4. Механизм ориентации хобота 3, несущего в захвате 4 поковку 5 относительно ру чьев штампа 6 и 7, выполнен в виде двуплечего рычага 8, шарнирно закрепленного , на хоботе 3 на осп 9 и несущего на одном конце следящий элемент 10, а на др.угомдиаметрально расположенные регулируемые упоры 11 и 12i контактов 13 и 14, вза имодействующих с упорами при отклонении следящего элемента от оси ручья и связанных через систему управления с приводом перемещения тележки} упора 15, взаимодействующего в крайнем выдвинутом пело- жении хобота с контактом 16, входящим в схему управления перемещения хобота по направляющим 17, и обеспечивающего посл настройки соыиещение оси симметрии поко& ки с осью симметрии X-X матрицы, « такж неподвижно установленных по оси У-У каждого ручья щтампа призм 18. Для обеспечения надежной остановки хо бота в крайнем положений имеется еще дополнительный упор 19t Двуплечий рычаг 8 выполнен плавающим в направлении оси 9, для чего он имеет сферу 20, опирающуюся на опорную поверхность 21, пружину 22, контакт 23 и упор 24, закрепленные соответственно на хоботе 3 и рычаге 8, Манипулятор, взяв поковку иа одного ручь и приподняв ее над матрицей, перемещае- ся ко второму ручью. После грубой остановки тележки манипулятора опускают хобот до соприкосновения сферы 2О с опорной поверхностью 21; срабатывает конечный выключатель (контакт) 23 и перемещение хобота по вертикали прекращается, Дэлее включается перемещение хобота в направлении к штампу. Если следящий элемент 10 не попадает в верщину Б призмы. 18, то при дальнейщем перемещении хобота следящий элемент скользит по наклонной поверхности призмы и происходит отклонени рычага 8, а один из его упоров 11 или 12 замыкает соответствующий контакт 14 или 13, который включает привод перемещения тележки вправо или влево в зависимости от I того до оси призмы или после нее происходит соприкосновение следящего элемента с наклонной поверхностью. При попадании следящего элемента 10 в верщину Б происходит совмещение осей заготовки с осями Х-Х и У-У штампа, так как срабатывает также и контакт 16 от упора 15 и перемещение хобота прекращается. После ориентирования заготовки подается команда на разжатие захвата и поковка опускается в ручей матрицы. Затем хобот отводится от матрицы, производится рабочий ход пресса, и далее повторяется аналогичный цикл автоматического ориентирования хобота с захватом по отношению к поковке и, если необходимо, передача ее в следующий ручей. Манипулятор позволяет механизировать и автоматизировать процесс штамповки, по высить качество щтамповки, сократить врет мя на перекладку поковки из ручья в ручей, что приводит к повышению производительности. Формула изобретения Манипулятор к пресс у., с о держащий приводную тележку со смонтированными на ней хоботом с захватом, механизмами его перемещения и системой управления, отличающийся тем, что, с целью повышения производительности за счет обеспечения ориентации хобота по трем осям относительно ручья штампа, он снабжен механизмом ориентации хобота, выполненным в виде двуплечего рычага, шарнирно смонтированного на хоботе и несущего на одном конце со стороны захвата следящий элемент, на другом конце - три упора, два из которых расположены диаметрально в горизонтально плоскости, а третий - в вертикальной, а также смонтированных на хоботе контактов, взаимодействующих с упорами двуплечего рычага и электрически связанных с системой управления, при этом на нерабочем торце хобота смонтирован упор, взаимодействующий с индивидуальным контактом, установленным на приводной тележке, и электрически связанным с системой управления. Источники информации, при1штые во вн№мание при экснертизе: 1, Миронов В. Г, и др. Конструирование кузаечных манипулятвров, М„ Мащиностроение, 1970, с, 9, рис, 5,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Способ захвата и переноса ступенчатых поковок и устройство для его осуществления | 1982 |
|
SU1063589A1 |
| Автоматизированная линия горячей штамповки | 1982 |
|
SU1053948A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
Фиг.2.
21 Vix
/7777
Фиг.З
