(54) ПОДВЕСНОЙ КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Ковочный манипулятор | 1983 |
|
SU1171172A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Механизм зажима клещей хобота ковочного манипулятора | 1978 |
|
SU759192A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Хобот кузнечного манипулятора | 1986 |
|
SU1393523A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| Клещевой захват ковочного манипулятора | 1982 |
|
SU1034826A1 |
- , ; 1 - . . -Изобретение касается вспомогатель ного производства кузнечно-прессрвых цехов машиностроительных заводов а именно манипулирующих устройств.
Известен подвесной ковочный манипулятор,, содержащий установленный на опорах мундштук с клещами, механизм зажима и снабженный редуктором приводной механизм вращения клещей. Связанную с тележкой передвижения по подвесным рельсам траверсу с выдвижной колонной, а также узел подвеса мундштука к выдвижной колонне с основным и допрлнительным амортизаторами 1 .
Недостатком известного подвесного ковочного манипулятора является невысокая надежность работы, что является следствием его сложной конструкции и большими динамическими нагрузками на элементы манипулятора, возникающими при его работе.
Целью изобретения является поввдшение Нсщежности работы путем упрощения конструкции и обеспечение возможности снижения динамических нагрузок на элементы манипулятора.
С этой целью узел подвеса мундштука к вьшвижной колонне выполнен в виле шарнирно связанных с выдвижной
.колонной средней своей частью переднего и заднего двуплечих рычагов и вертикальных тяг, Щарнйрно связывающих опоры мундштука с одним из плеч каждого двуплечего рычага, при этом основной амортизатор шарнирно соединен с выдвИжной колонной и посредством/индивидуальной тяги - со свободными плечами переднего и заднего двуtoплечих рычагов, а дополнительный амортизатор связан с одной из опор и с индивидуальной тягой основного амортизатора в месте ее соединения со свободным плечом переднего двуплечего рычага. При этом привод механизма вращения клещей смонтирован на выдвижной колонне и свтзан с редуктором посредством, шарнирного вала.
0
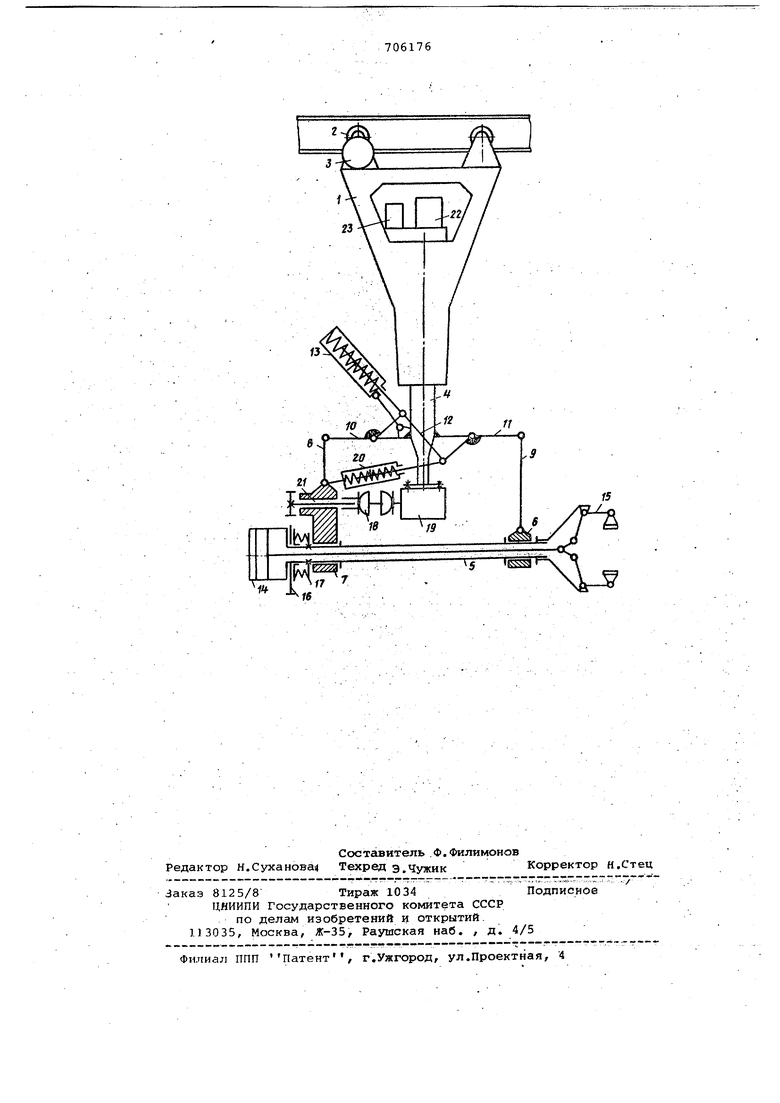
На чертеже изображен предлагаемый манипулятор.
Подвесной ковочный манипулятор содержит траверсу 1, подвесные тележки 2, механизм 3 передвижения, выдвижную колонну 4, мундштук 5, установленный на независимых подшипниковых передней 6 и задней 7 опорах, . вертикальные 8 и 9, несутие рычаги 10 и 11, развернутые противо0 лоложно относительно друг друга и связанные тягой 12 и амортизатором 13 с выдвижной колонной 4, силовой цилиндр 14, механизм зажима клещей 15, .одноступенчатый редуктор 16, соединенный фрикционной предохранительной муфтой 17 с мундштуком 5 и шарнирным валом 18, имеющим осевую и угловую подвижность, с приводом 19 вращения клещей, который соединен с выдвижной .колонной 4. Осевые амортизаторы 20 СдёДЙНЙЙТ заднююподшипниковую опору, 7 с несущим рычагом 11. Подшипниковы ми опорами редуктора 16 являются нез вйсимая задняя опора мундштука 5 и дополнительная опора 21, расположенная в корпусе задней опоры. Выдвижная колонна 4 снабжена приводами под ема 22 и поворота 23. Осевая передача поковки и перемещение манипулятора осуществляется с помощью механизма 3 Передвижения и xoflOBijx тележек 2 по подвесным, рельсам. Вертикальный цодъём и перенос поковки в горизонтальной Плоскости производится механизмами подъема 22 и поворота 23 колонны, Захват поковки выполняют клещи 15 с помощью ейловрго цилиндра 14, пбвЪрЬт поковки вокруг оси осуществляется приводом 19 вращения клещей 15 через редуктор 16. В процессе ковки передние и задние ве15тикальные тяги 8 и . нагружаются составляющей от внешних сил и сия веса хобота и поковки, а, также: составляющей от опрокидывающего момента. Нат рузки от вертикальHbix тяг 8 и 9 замыкаются на тяге 12 и состав Ляющая .от опрокидывающего момента уничтожается, а на амортизатор 13 де ствует только составляющая от внешни сил и силы веса хобота и поковки. Ос вые толчки и удары, действующие на хобот манипулятора, воспринимаются и демпфируются осевыми амортизатО эами 20......... ... .. . ... .,....,., ,. ,., .-,,.... ...:.. Предлагаемый подвесной ковочный манипулятор обладает высокой надежностью работы за счет упрощения конс рукции и обеспечения возможности снижения динамических нагрузок на его элементы. Формула изобретения 1. Подвесной ковочный манипулятор, содержащий установленный на опорах мундштук с клещами, механизм зажима и снабженный редуктором приводной механизм вращения клещей, связанную с . тележкой передвижения по подвесным рельсам траверсу с выдвижной колонной, а также узел подвеса мундштука к выдвижной колонне с основным и дополнительным амортизаторами, о т л и ч а ю щи и с я тем, что, с целью повышения надежности работы путем упрощения конструкции и обеспечения возможности снижения динамических нагрузок на элементы манипулятора, узел под-веса мундштука к выдвижной колонне выполнен в виде шарнирно связанных с выдвижной колонной средней своей частью переднего и заднего двуплечих рычагов и вертикальных тяг, шарнир.но .связывающих опоры мундштука с одним из плеч каждого двуплечего рычага, при этом Основной амортизатор шарнирно соединен с выдвижной колонной и посредством индивидуальной тяги - со свободными плечами переднего и заднего двуплечих рычагов, а дополнительный амортизатор шарнирно связан с одной из опор и с индивидуальной тягой Основного амортизатора в МеСтё её доёдинения со свободным плечом переднего двуплечего рычага. 2. Манипулятор по п. 1, о т л и ч а ю щ и и с я тем, что привод механизма вращения клещей смонтирован на выдiвижнoй кОлонне и связан с редуктором посредством шарнирного ва,ла Источники информации, прннят{лё во внимание при экспертизе 1. Патент ГДР 38443,кл, 49Ь, 5, 1965.
1Г V
5
