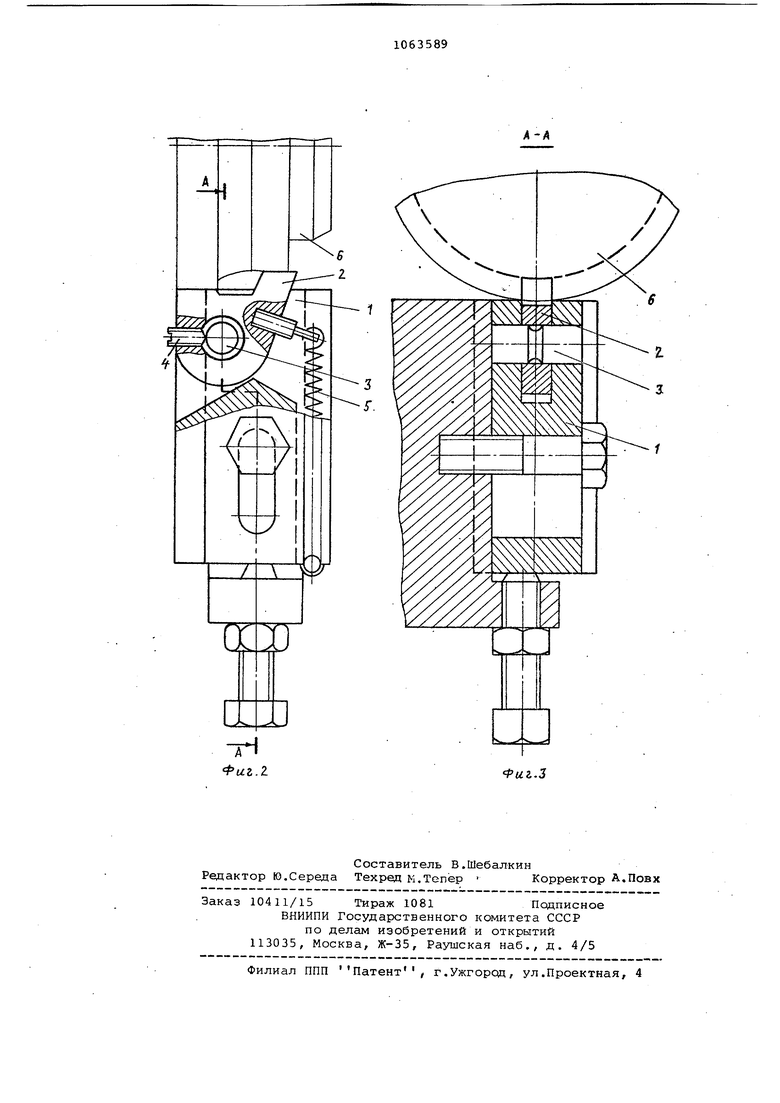
2. Устройство для осуществления способа по П.1, Содержащеепсдвижный хобот и смонтированные в индивидуальных корпусах, установленных на хоботе, захваты с рабочими поверхностями псщ разные ступени поковки, отличающееся тем,-что каждый захват выполнен в виде шарнирно смонтированного в корпусе
U-образного двуплечего рычага с разновеликими плечами, торцовые поверхности которых соответствуют профилю зажимаемой поковки, при этом двуплечий рычаг со стороны больщего плеча подпружинен, а ось его шарнира расположёна перпендикулярно к оси подачи поковки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный штамп | 1977 |
|
SU657899A1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Автоматическая линия для изготовления изделий с резким переходом по диаметру в поперечном сечении | 1972 |
|
SU519262A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Автоматизированная линия горячей штамповки | 1982 |
|
SU1053948A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автомат многопозиционный для горячей объемной штамповки комплектных заготовок | 1982 |
|
SU1098648A1 |
| Устройство для переноса заготовок | 1988 |
|
SU1556929A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
1. Способ захвата и переноса ступенчатых поковок, например, к штамповочным автоматам, включающий подачу поковки на позицию ее захвата, центрирование и захват поковки по .большей и. меньшей ее ступеням и перенос поковки в позицию обработки, отличающийся тем, что, с целью повышения производительности, точности и надежности захвата, центрирование и захват поковки по большей и меньшей ее ступеням осуществляют при овевом перемещении поковки. Q (Л а: со сд 00 со
Изобретение относится к вспомогательному Оборудованию штамповочно1 о производства машиностроителнных пред приятий и может быть использовано при автоматизации процессов штамповки поковок на многопозиционных штам повочных автоматах. Известен способ захвата и перено ступенчатых поковок, включакадий под чу поковки на позицию ее захвата, центрирование и захват поковки по большей и меньшей ее ступеням и пер нос поковки в позицию обработки. Способ осуществляют устройство для захвата и переноса ступенчатых поковок, содержащим подвижный хобот и смонтированные в индивидуальных корпусах, установленных на хоботе, захваты с рабочими поверхностями под разные ступени поковки ij . Указанный- способ обладает невысо кой производительностью, так как тр бует неподвижного состояния поковки перед ее захватом. При захвате стуленчатой поковки известным захватом возможен ее перенос относительно рабочих частей штампа. Цель изобретения - повышение производительности, точности и надежности захвата поковок. Указанная цель достигается тем, что согласно способу захвата и переноса ступенчатых поковок, например, к штамповочным автоматам, включающий псщачу поковки на позицию ее захвата, центрирование и захват поковки по большей и меньшей ее ступеням и перенос поковки в позицию обработки захват поковки по боль шей и меньшей ее ступеням осуществляют при осевом перемещении поковки. Устройство для осуществления способа содержит -подвижный хобот и . смонтированные в индивидуальных корпусах, установленных на хоботе, захваты с рабочими поверхностями под разные ступени поковки, каждый захват выполнен в виде шар 1ирно смонти рованного в корпусеи-образного двуплечего рычага с разновеликими плечами, торцовые поверхности которых соответствуют профилю зажимаемой поковки, при этом двуплечий рычаг со стороны большего плеча подпружинен, а ось его шарнира расположена перпендикулярно к оси подачи поковки. На фиг. 1 изображено устройство для захвата и переноса ступенчатых поковок, общий вид; на фиг. 2 - ра захватов в рабочем положении; на фиг. 3 - разрез А-А на фиг, 2. Устройство ссяержит корпус 1, в котором смонтирован шарнирно профильный двуплечий рычаг 2 на оси 3. От выпадания ось 3 имеет проточку, в которую входит стопорный винт 4. Открытое положение двуплечего рычага 2 обеспечивает пружина 5. Устройство работает следующим образом. В момент выталкивания отштампованной поковки б из полости матрицы устройство находится напротив матрицы в исходном положении. При движении поковки 6 к устройству захвата большая ее ступень касается торцовой поверхности меньшего плеча двуплечего рычага 2, разворачивая его вокруг оси 3. При этом к меньшей ступени поковки подходит торцовая поверхность большего плеча двуплечего .рычага 2, происходит центрация заготовки и ее зажим. Движение поковки из полости матрицы ограничено ходом выталкивателя автомата. После зажатия поковки происходит ее транспортировка в следующей ручей штампа, при остановке поковки б напротив матрицы происходит ее заталкивание пуансоном в рабочую зону. При этом двуплечий рычаг 2 во время освобождения торцовой поверхности его меньшего плеча возвращается в исходное положение. Использование предлагаемого изобретения позволяет повысить производительность, точность и надежность устройства для захвата и переноса заготовок.
fut.3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1977 |
|
SU642150A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
