I
Изофетение. относится к оборудованию для конвейерного транспорта, а именно к яовитепям ленты конвейера.
Известно устройство опя улавливания конвейерной ленты в случае ее обрыва,
шшючаюшее взаимодействующие с лентой яачажные захваты l .
Недостаток этого устройства заключается в неравномерности передачи фрикционного усилия по ширине ленты.
Известно также устройство для улавливания ленты коя&ейара, содержащее пов(фот1вые в т нэоятальной плоскости рычаге, соединенные канатами через систему 6по кс с грузовым Приводным механизмом,
сблокированным с датчиком обрыва девтЫ| и снабженные фрикционными башмаками 2
Рабочие органы ; улавливающих устройств с жесткими фрикционными башмаками, неза|висимо от наличия футеровки, имеют постое янный рабочий контур. Взаимодействие жестких башмаков с груженой лентой при ее торможении характеризуется приложением сосредоточенной нагрузки на ограниченный участок ленты. Так как линейные размеры
башмаков обусловлены расстоянием между роликоопорами става конвейера, то увеличение удельного давления на ленту требует установки мощного привода. Максимального тормозного усилия, развиваемого таким ловителем и зависящего, кроме того, от величины допустимого удельного давления на материал ленты, Ьтожет оказаться недостаточно для требуемой величины тормозного усилия при улавлшаавви ленты мощного конвейера. Это впечет за собой установку дополнительных улавливающих устройств и усложняет управпение их работой, т. е. требует синхронизаоии их включения. При попадании крупных куске в момент захвата лен меяаду башмаками возникают значительные концёгтра- цин местных напряжений в ленте, что ведвт| к ее повреждению.
Целью изобретения является уменьшение износа пенть при транспортировании кускового материала.
Это достигается тем, чго рабочий орган ловителя выполнен в виде гибких траверс.
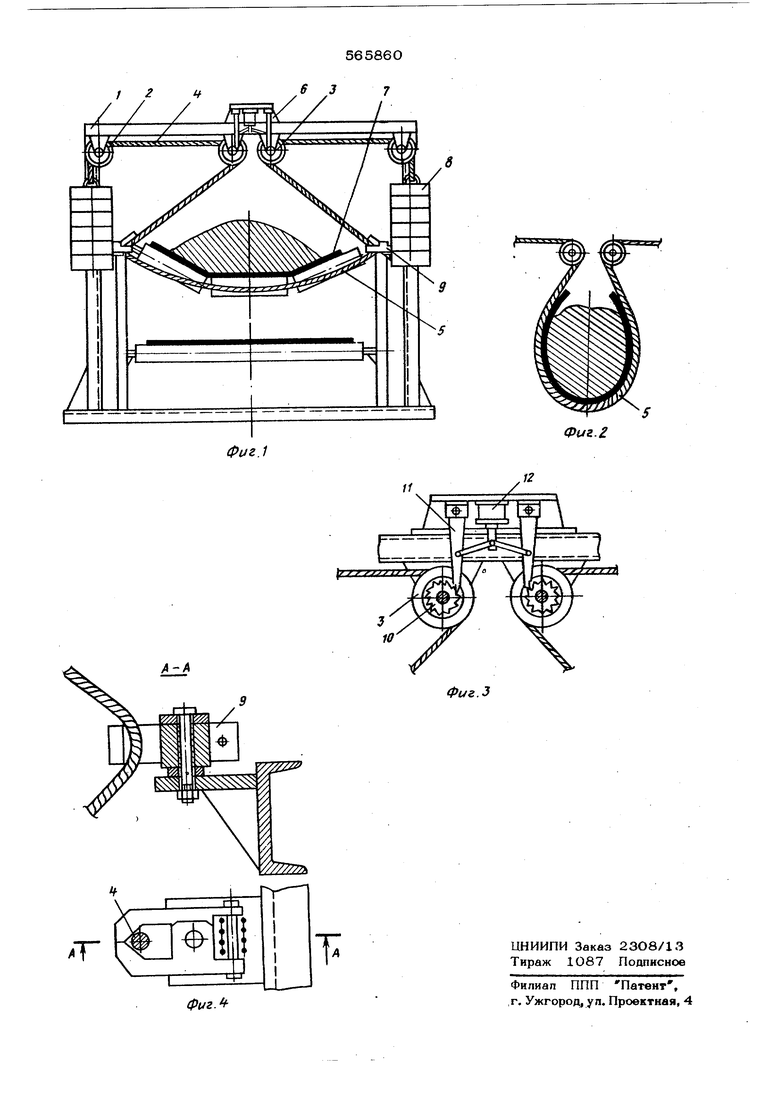
На фиг. 1 изображен ловитель ленты конвейера, поперечное сечениеi на фиг. 2 лента с грузом прв захвате ее гибкими траверсами; на фаг. 3 фиксатор; на фаг, 4 - замок.
Ловитель ленты конвейера содержит уставовленные на раме 1 блоки 2 и 3, через которые пропущен канат 4 с гибкой трав«р сой 5, в качестве которой можно использовать канат или полосы из конвейерной лекн ты, В зависимости от угла установки и мощности конвейера -на раме целесообразно устанавливать несколько траверс. Блоки 3 снабжены фиксатором 6, а канат с траверсой пропущенной под лентой 7 и несущей на концах груз 8, установлен в замках 9 таК| чтобы не препятствовать движению ленты при нормальной работе конвейера. Фиксатор 6 состоит из храпового колеса Ю, собачки 11 и электромагнита 12, подвижный сердечник которого связан рычагами с хра повым механизмом. |3амок 9 состоит из соосно закрепленных подпружиненных рычагот. i
При обрыве ленты или ее обратном аварийном движении по |сигналу датчика-контрольного ролика с тахогенератором замыкается электрическая цепь электромагнита 12, который управляет храповым механизмом, раз гружающим блоки 3. Под действием груза S канат 4 с гибкой траверсой 5 перемешав ется и захватывает ленту.
- Выполнение ловителя с гибким рабочим органом - гибкой траверсой ( в качестве последней могут быть использованы, например г канаты, гибкие ленты) позволит добиться распределения тормозного усилия по полному периметру поперечного сечения .ленты. Причем на раме улавливающего уст ройства целесообразно устанавливать нес- только траверс, что вызывает увеличение
фрикционного воздействия на ленту за счет дополнительных сил сопротивления движению. Величина удельной нагрузки траверс на материал ленты поддается регулированию как за счет изменения их количества, так и размеров поперечного сечения. Положительный эффект предлагаемого у;1авливающего устройства заключается также в независимости распределения тормозного усилия от степени кусковатости груза, ибо гибкие траверсы позволяют копировать поперечный профиль груза. Кроме того, дополнительные силы трения возникают на деформированных участках ленты между траверсами. Положительным свойством улавливающего устройства с гибким захватным (рабочим) органом является мягкая характеристика торможения, что в отличие от жестких ловителей не вызывает дополнительных динамических нагрузок на ленту в процессе ее улавливания.
Формула изобретения
Ловитель ленты конвейера, включающий рабочий орган и грузсжой привод с системой блоков, канатов и датчиком , отличающийся тем, что, с целью уменыиения износа ленты при транспортировании кускового материала, рабочий орган выполнен в виде гибких траверс.;
Источники информации, принятые во внимание при экспертизе:
1. торское свидетельство № 19О255, кл. В 65 Q 43/06, 1965.
2.Авторское свидетельство N° 2О71О8, кл. В 65 Q 43/06, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛАВЛИВАНИЯ ОБОРВАННОГО ГИБКОГО ТЯГОВОГО ОРГАНА ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296093C2 |
| СПОСОБ ОСТАНОВКИ ЛЕНТЫ КОНВЕЙЕРА В СЛУЧАЕ ЕЕ ОБРЫВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2067070C1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ В СЛУЧАЕ ЕЕ ОБРЫВА | 1968 |
|
SU207108A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| ВАКУУМ-ЛОВИТЕЛЬ КОНВЕЙЕРНОЙ ЛЕНТЫ | 1999 |
|
RU2167095C2 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1978 |
|
SU685586A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2012 |
|
RU2494031C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405726C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2335442C1 |