Изобретение относится к горной, промышленности, а именно к автоматическому управлению проходческими щитами, проходческими комбайнами и др.
Цель изобретения - повышение надежности за счет упрощения системы.
На фиг. 1 представлена принципиальная схема системы; на фиг. 2 - схема блока измерения угла крена и блока управления; на фиг. 3 - расположение элементов системы в проходческом забое.
Система состоит из оптического задатчи- ка направления лазера 1, луч которого проходит через блок 2 отклонения луча, диафрагму 3 и поступает на матрицы фотоэлектрического приемного устройства 4, связанного с блоком управления 5 исполнительными устройствами проходческого щита, один из входов которого соединен с вйходом блока 6 измерения угла крена. Вход блока 2 отклонения луча связан с блоком задания угла поворота 7.
Фотоэлектрическое приемное устройство состоит из матрицы 8 с четырьмя фотоэлементами 9, расположенными друг от друга на расстоянии, равном диаметру луча, связанной механически через винтовую передачу 10 с электродвигателем 11 и подвижной катушкой индуктивного датчика 12 измерения перемещения. Посредством горизонтальной винтовой передачи 13 матрица 8 связана с электродвигателем 14 и подвижной катушкой индуктивного датчика измерения перемещения 15. Фотоэлементы 9 через избирательные усилители 16, устройства сравнения 17 и усилители мощ ности 18 электрически связаны с электродвигателями II и 14. Индуктивные датчики 12 и 15 электрически связаны через фазочувствительные усилители 19 и 20 с блоком 5. С матрицей 8 механически, посредством корпуса 1 и оптически, посредством полупрозрачного зеркала 22 и от- ражаюц1его зеркала 23, связана матрица 24, состоящая из четырех основных фотоэлементов 25, расположенных на взаимнопер- пендикулярных осях и восьми дополнительных фотоэлементов 26, размещенных между основными и соединенных по два параллельно с основными, связанными через избирательные усилители 27, устройства сравнения 28 и регулируемые усилители 29, 30 с блоком управления 5. В цепи обратных связей выходных усилителей 29 и 30 включены дополнительные фотоэлементы - фоторезисторы 31 и 32 соответственно. Блок отклонения луча 2 состоит из зеркальной призмы 33, связанной через редуктор 34 с электродвигателем 35, соединенным через усилитель 36 с устройством сравнения 37, которое подключено к блокам 3 и 7.
Диафрагма 3 состоит из основания 38, на котором установлена матрица 39 с отверстием 40 и двумя фотоэлементами 41, связанными через усилители напряжения
42 и 43 с устройством сравнения 44, которое через усилитель мощности 45 подключено к электродвигателю 46. Электродвигатель соединен через винтовую передачу 47 с матрицей 39 и датчиком перемещений 48, который через усилитель 49
соединен с устройством сравнения 37 блока 2.
Блок 7 задания угла поворота оптического луча состоит из секционированного потенциометра 50, подключенного к ламелям шагового искателя 51, соединенного электрически с путевым выключателем 52, связанным с механизмом перемещения 53 проходческого щита (например, гидродомкратом).
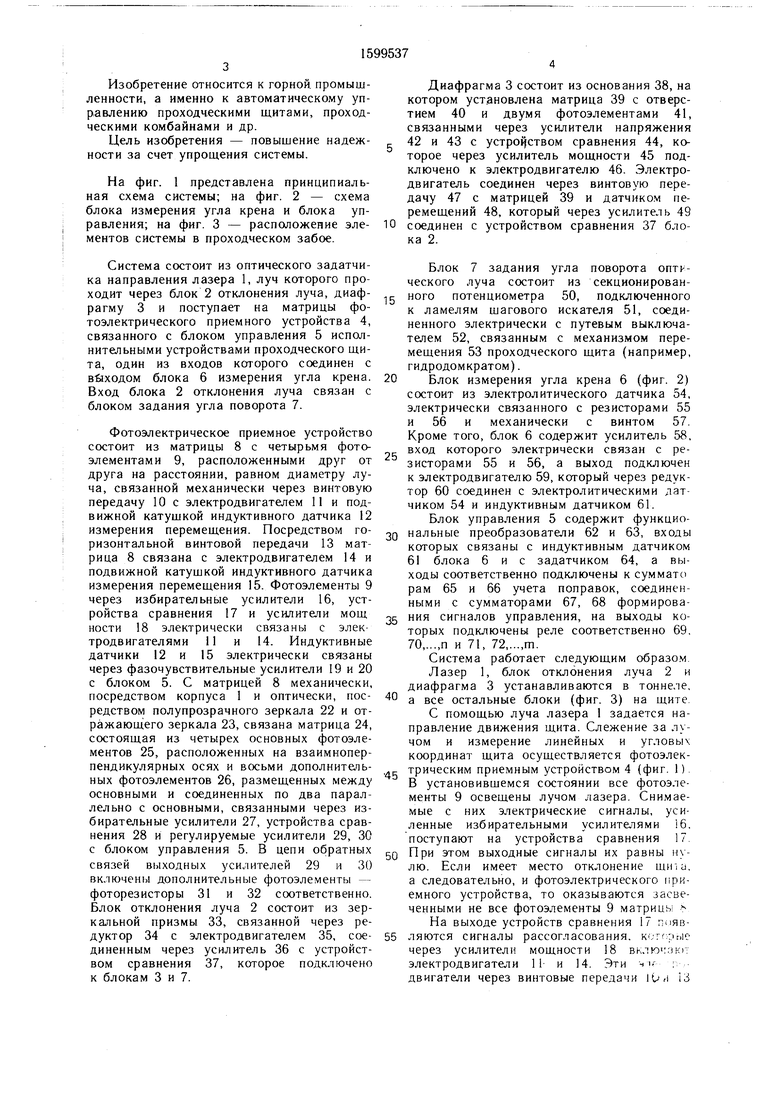
0 Блок измерения угла крена 6 (фиг. 2) состоит из электролитического датчика 54, электрически связанного с резисторами 55 и 56 и механически с винтом 57. Кроме того, блок 6 содержит усилитель 58, вход которого электрически связан с резисторами 55 и 56, а выход подключен к электродвигателю 59, который через редуктор 60 соединен с электролитическими датчиком 54 и индуктивным датчиком 61.
Блок управления 5 содержит функцио0 нальные преобразователи 62 и 63, входы которых связаны с индуктивным датчиком 61 блока бис задатчико.м 64, а выходы соответственно подключены к суммато рам 65 и 66 учета поправок, соединенными с сумматорами 67, 68 формирова5 ния сигналов управления, на выходы которых подключены реле соответственно 69. 70,...,п и 71, 72,...,т.
Система работает следующим образо.м
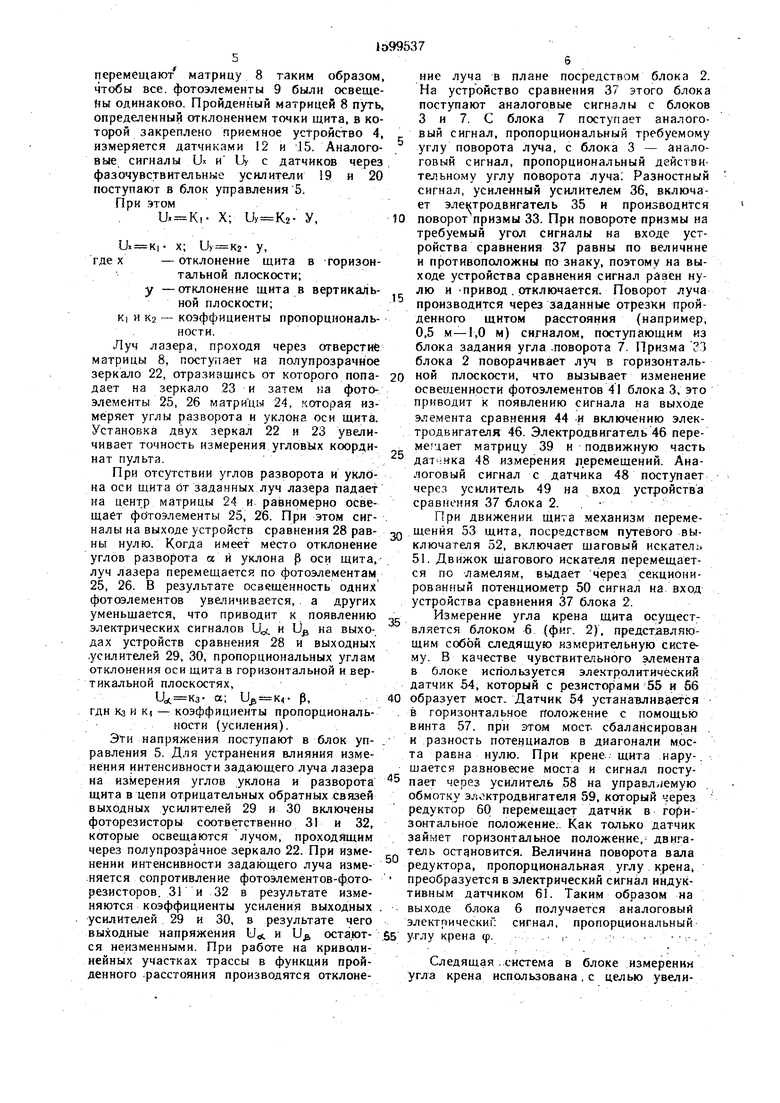
Лазер 1, блок отклонения луча 2 н
диафрагма 3 устанавливаются в тоннеле,
0 а все остальные блоки (фиг. 3) на щите С помощью луча лазера 1 задается направление движения щита. Слежение за лучом и измерение линейных и угловых координат щита осуществляется фотоэлекg трическим приемным устройством 4 (фиг. 1). В установившемся состоянии все фотоэлементы 9 освещены лучом лазера. Снимаемые с них электрические сигналы, усиленные избирательными усилителями i6. поступают на устройства сравнения 17,
0 При этом выходные сигналы их равны нулю. Если имеет место отклонение шша. а следовательно, и фотоэлектрического приемного устройства, то оказываются засвеченными не все фотоэлементы 9 матрицы На выходе устройств сравнения 17 появ5 ляются сигналы рассогласования, к я г.рые через усилители мощности 18 включгж); электродвигате/1И 11- и 14. Эти -ч ь- ;, :. двигатели через винтовые передачи lUfi 13
перемещают матрицу 8 таким образом, чтобы все. фотоэлементы 9 были освещены одинаково. Пройденный матрицей 8 путь, определенный отклонением точки щита, в которой закреплено приемное yctpoйcтвo 4, измеряется датчиками 12 и 15. Аналоговые сигналы Ux и Цу с датчиков через фазочувствительные усилители 19 и 20 поступают в блок управления 5. При этом
X; У,
Ux K|- х; у,
где X- отклонение щита в горизонтальной плоскости; у -отклонение щита в вертикальной плоскости;
KI и К2 - коэффициенты пропорциональности.
Луч лазера, проходя через отверстие матрицы 8, поступает на полупрозрачное
ние луча в плане посредством блока 2. На устройство сравнения 37 этого блока поступают аналоговые сигналы с блоков 3 и 7. С блока 7 поступает аналого вый сигнал, пропорциональный требуемому углу поворота луча, с блока 3 - аналоговый сигнал, пропорциональный действительному углу поворота луча; Разностный сигнал, усиленный усилителем 36, включает электродвигатель 35 и производится
10 поворот призмы 33. При повороте призмы на требуемый угол сигналы на входе устройства сравнения 37 равны по величине и противоположны по знаку, поэтому на выходе устройства сравнения сигнал равен нулю и привод , отключается. Поворот луча производится через заданные отрезки пройденного щитом расстояния (например, 0,5 м-1,0 м) сигналом, поступаюи нм из блока задания угла .поворота 7. Призма 33 блока 2 поворачивает луч в горизонталь15
зеркало 22, отразизщись от которого попа- 20 яо плоскости, что вызывает изменение дает на зеркало 23 и затем ка фото-. освещенности фотоэлементов 41 блока 3, это
пряводит к появлению сигнала на выходе эле.мента сравнения 44 и включению электродвигателя 46. Электродвигатель 46 переэлементы 25, 26 матрицы 24, которая измеряет углы разворота и уклона оси щита. Установка двух зеркал 22 и 23 увеличивает точность измерения угловЫх коорди-мегцает матрицу 39 и подвижную часть нет пульта.датчика 48 измерения перемещений. Ана- При отсутствии углов разворота и укло-логовый сигнал с датчика 48 поступает на оси щита от заданных луч лазера падаетчерез усилитель 49 на вход устройства на цент,р матрицы 24 и, равномерно осве-сравнения 37 блока 2. . щает фбтоэлементы 25, 26. При этом сиг- .При движении, щита механизм переменалы на выходе устройств сравнения 28 рав- 20 щита, посредством путевого выны нулю. Когда имеет место отклонениеключателя 52, включает щаговый искатель
углов разворота аи уклона р оси щита,- 51. Движок щагового искателя перемещаетлуч лазера перемещается по фотоэлементам
25, 26. В результате освещенность одних
фотоэлементов увеличивается, . а других
уменьщается, что приводит к появлению „,.
электрических сигналов 1Ц и Up на выхо-.
дах устройств сравнения 28 и выходных
.усилителей 29, 30, пропорциональных углам
отклонения оси щита в горизонтальной и вертикальной плоскостях,
а; р, гдн кз и к.| - коэффициенты пропорциональности (усиления).
Эти напряжения пocтyпaюt в блок управления 5. Для устранения влияиия изме- интенсивности задающего луча лазера
на измерения углов уклона и щита в цепи отрицательных обратных связей выходных усилителей 29 и 30 включены фоторезисторы соответственно 31 и 32, которые освещаются лучом, проходящим через полупрозрачное зеркало 22. При изменении интенсивности задающего луча изменяется сопротивление фотоэлементов-ф.ото- резисторов. 31 и 32 в результате изменяются коэффициенты усиления выходных
ся по -ламелям, выдает через, секционированный потенциометр 50 сигнал на вход устройства сравнения 37 блока 2.
Измеренное угла крена щита осуществляется блоком 6 (фнг. 2), представляющим собой следящую измерительную систему. В качестве чувствительного элемента в блоке используется элехтролитичёскик датчик 54, который с резисторами 55 и 66
40 образует мост. Датчик 54 устанавливается
. в горизонтальное положение с помощью
винта 57. при этом мост сбалансирован
и разность потенциалов в диагонали моста равна нулю. При крене щита нару-. шается равновесие моста и сигнал постуразворота пает через усилитель 58 на управл- емую обмотку элч ктродвигателя 59, который через редуктор 60 перемещает датчик в горизонтальное положение.. Как только датчик займет горизонтальное положение,- двигатель остановится. Величина поворота вала редуктора, пропорциональная углу крена преобразуется в электрический сигнал индуктивным датчиком 61. Таким образом на выходе блока 6 получается аналоговый электрически : сигнал, пропорциональный
50
усилителей . 29 и 30, в результате чего
выходные напряжения J и U остают- .55 углу крена ф..
ся неизменными. При работе на криволи-:.:
нейных участках трассы в функции прой-Следящая ..система в блоке измерения
денного расстояния производятся отклоне-угла крена использована , с целью увелиние луча в плане посредством блока 2. На устройство сравнения 37 этого блока поступают аналоговые сигналы с блоков 3 и 7. С блока 7 поступает аналого вый сигнал, пропорциональный требуемому углу поворота луча, с блока 3 - аналоговый сигнал, пропорциональный действительному углу поворота луча; Разностный сигнал, усиленный усилителем 36, включает электродвигатель 35 и производится
0 поворот призмы 33. При повороте призмы на требуемый угол сигналы на входе устройства сравнения 37 равны по величине и противоположны по знаку, поэтому на выходе устройства сравнения сигнал равен нулю и привод , отключается. Поворот луча производится через заданные отрезки пройденного щитом расстояния (например, 0,5 м-1,0 м) сигналом, поступаюи нм из блока задания угла .поворота 7. Призма 33 блока 2 поворачивает луч в горизонталь5
0 яо плоскости, что вызывает изменение освещенности фотоэлементов 41 блока 3, это
пряводит к появлению сигнала на выходе эле.мента сравнения 44 и включению электродвигателя 46. Электродвигатель 46 перемегцает матрицу 39 и подвижную часть датчика 48 измерения перемещений. Ана- логовый сигнал с датчика 48 поступает через усилитель 49 на вход устройства сравнения 37 блока 2. . При движении, щита механизм переме„,.
ся по -ламелям, выдает через, секционированный потенциометр 50 сигнал на вход устройства сравнения 37 блока 2.
Измеренное угла крена щита осуществляется блоком 6 (фнг. 2), представляющим собой следящую измерительную систему. В качестве чувствительного элемента в блоке используется элехтролитичёскик датчик 54, который с резисторами 55 и 66
0 образует мост. Датчик 54 устанавливается
. в горизонтальное положение с помощью
винта 57. при этом мост сбалансирован
и разность потенциалов в диагонали моста равна нулю. При крене щита нару-. шается равновесие моста и сигнал посту пает через усилитель 58 на управл- емую обмотку элч ктродвигателя 59, который через редуктор 60 перемещает датчик в горизонтальное положение.. Как только датчик займет горизонтальное положение,- двигатель остановится. Величина поворота вала редуктора, пропорциональная углу крена преобразуется в электрический сигнал индуктивным датчиком 61. Таким образом на выходе блока 6 получается аналоговый электрически : сигнал, пропорциональный
лами, одно из которых полупрозрачное, установленными между матрицами и связанными между собой оптическими и иге- ханически, а вторая матрица снабжена де- g сятью дополнительными фотоэлементами, четырьмя избирательными усилителями, двумя регулируемыми усилителями при этом восемь дополнительных фотоэлементов соединены попарно и установлены параллельно с каждым из четырех основнь1х фоточеиия линейной части характеристики датчика. С блока измерения крена б сигнал поступает в блок управления 5 с целью введения поправок в линейные координаты X и у проходческого щита.
Величины поправок AUx и ДУ, определяются по формулам:
81пф - в горизонтальной плоскости j . (I-:cos(p) -в вертикальной плосKCJCTH,..
гд|е г-, расстояние от оеи щита до точки 10 элементов и расположены взаимноперпёнди - установки матрнц блока 4.кулярно, выходы противоположных основных
фотоэлементов второй матрицы через избирательные усилители подключены к входам соответствующих блоков срйвнения, выходы g последних через регулируемые усилители подключены непосредственно к второму и третьему входам блока управления соответственно, а через соответствующие девятый и десятый фотоэлементы, установленные за полупрозрачным зеркалом, к своим
лунная поправка AU складывается с коор-, 20 вторым входам, блок задания угла пово- Д|1натой Uj, и на выходе получается сиг-рота выполнен из последовательно соединенных путевого выключателя гидродомкрата механизма перемещения проходческого щита, щагового иск ателя и секционирован Для получения поправок AU« и AU,, ис|пользуются функциональные преобразователи 62 и 63, а постоянная величина, г поступает из задатчнка 64.
В блоке управления 5 сумматором 65
(фиг. 2) вычисленная поправка AU склаД1 1вается с координатой U« и на выходе
с 1мматора 65 получается, сигнал U,-
IUn±AUx. В сумматоре 66 блока 5 вычисн4л Uij,Uy±AUy. Для управления щитом необходимо сформировать управляющие воздействия в горизонтальной и вертикальней плоскостях. Формирование управляющих ного потенциометра, выход которого подклюсйгналов в горизонтальной плоскости Ujx. -
И Uzy вертикальной - осуществляется сумматорами 67 и 68 соответственно по с 1едующему закону
чен к соответствук)щему входу блока от-, клонения луча, а соответствующие выходы фотоэлектрического приемного устройства подключены к четвертому и пятому входам блока управления.
,tJi c4-K6Un;. U2y KiUiy4-K8U#, . К5, Кб, к/. Kg - постоянные коэффициенты Управляющий сигнал Utx поступает на вКоды реле 69, 70,.,.,п, которые включают пЬсредством электрогидрозолотников гидро- дрмкраты для управления щитом в горичен к соответствук)щему входу блока от-, клонения луча, а соответствующие выходы фотоэлектрического приемного устройства подключены к четвертому и пятому входам блока управления.
30
40
2. Система щита по п. I, отличающаяся тем, что блок управления выполнен из двух функциональных преобразователей, дадат- чика, двух сумматоров учета поправок и двух сумматоров формирования сигналов уп зюнтальной плоскости. Управляющие сиг- 35 равления и реле управления в горизои- налы Uzy поступают на входы реле 71, тальной и вертикальной плоскостях соотбетственно по количеству механизмов управ-, ления, при этим первые Ч1ходы .функциональных преобразователей соединены собой и являются первым входом . блока управления, вторые входы функциональных преобразователей подкл ючены к выходам за-, /датчиков, а выходы .- к первым входам соответствующих сумматоров.учета поправок, вторые входы которых являются соотйет- ненные оптический задатчик направления, 5 ственно четвертым и пятым входами блока блок отклонения Луча, диафрагму, фото-управления, выходы сумматоров учета поправок соединены с первыми входами соот ветствующих сумматоров формирования сиг-, налов управления, вторые входы которых являются, соответственно вторым и третьим fknoK измерения угла крема, отличающаяся Q входами блока управления, а выходы подтем, Что, с целью повышения надежности заключены соответственно к входам реле уп- Счет упрощения систе 1Ы, она снабжена блоравления в горизонтальной и вертикальной ком -задания угла гюворота, двумя зерка- плоскостях.
72,..,т, которые включают гидродомкраты управления щитом в вертикальной плоскости. ,
Формула изобретения
. Система автоматического управления Движением коллекторного проходческого щита, содержащая последовательно соеди
электрическое приемное устройство с двумя матрицами, каждая из которых содержит четыре основных фотоэлемента и блок упран- ления, к псриому входу которого подключен
лами, одно из которых полупрозрачное, установленными между матрицами и связанными между собой оптическими и иге- ханически, а вторая матрица снабжена де- сятью дополнительными фотоэлементами, четырьмя избирательными усилителями, двумя регулируемыми усилителями при этом восемь дополнительных фотоэлементов соединены попарно и установлены параллельно с каждым из четырех основнь1х фотоэлементов и расположены взаимноперпёнди - кулярно, выходы противоположных основных
-
чен к соответствук)щему входу блока от-, клонения луча, а соответствующие выходы фотоэлектрического приемного устройства подключены к четвертому и пятому входам блока управления.
От 29
(DU2.l
От5локпЗО
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПРОХОДЧЕСКОГО ЩИТА | 1992 |
|
RU2034144C1 |
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
Изобретение относится к горной промышленности, а именно к автоматическому управлению проходческими щитами, проходческими комбайнами и др. Цель изобретения - повышение надежности за счет упрощения системы. Система управления содержит последовательно соединенные оптический задатчик 1 направления (например, лазер), блок 2 отклонения луча, диафрагму 3, фотоэлектрическое приемное устройство 4 с двумя матрицами 8, 24 и блок 5 управления. К входу блока 2 отклонения луча подключен блок 7 задания угла поворота, а к блоку 5 управления - блок 6 измерения угла крена. Блок 7 состоит из последовательно соединенных путевого выключателя 52 гидродомкрата механизма перемещения проходческого щита, шагового искателя 51 и секционированного потенциометра 50. Параллельно основным фотоэлементам (ФЭ) 25 второй марицы 24 установлены дополнительные ФЭ 26, соединенные попарно. Между матрицами 8 и 24 расположены зеркало 23 и полупрозрачное зеркало 22, за которым установлены дополнительные ФЭ 31 и 32. Выходы ФЭ 25 и 26 второй матрицы 24 через избирательные усилители 27 и блоки сравнения 28 подаются на регулируемые усилители 29, 30, в обратную связь которых включены ФЭ 31, 32. Указанное расположение зеркал 22 и 23 и ФЭ 25 и 26, а так же введение блока 7 позволило существенно упростить систему. Расположение ФЭ 31, 32 за полупрозрачным зеркалом 22 позволило устранить влияние изменения интенсивности задающего луча на измерение углов наклона. 1 з.п. ф-лы, 3 ил.
I г
I I I
Д
6
си
| Патент США № 4142763 кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
