(54) СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПОГРЕШНОСТЕЙ ШАГА ВИНТОВЫХ ПОВЕРХНОСТЕЙ ИЗДЕЛИЙ
Погрешости шага отшсывае шм способом могут быть Езмерещл или непосредственно Ев (рабатыашощЕХ станках с помошьш накладных щ нборов или с вомошью стйдиона шых приборов.
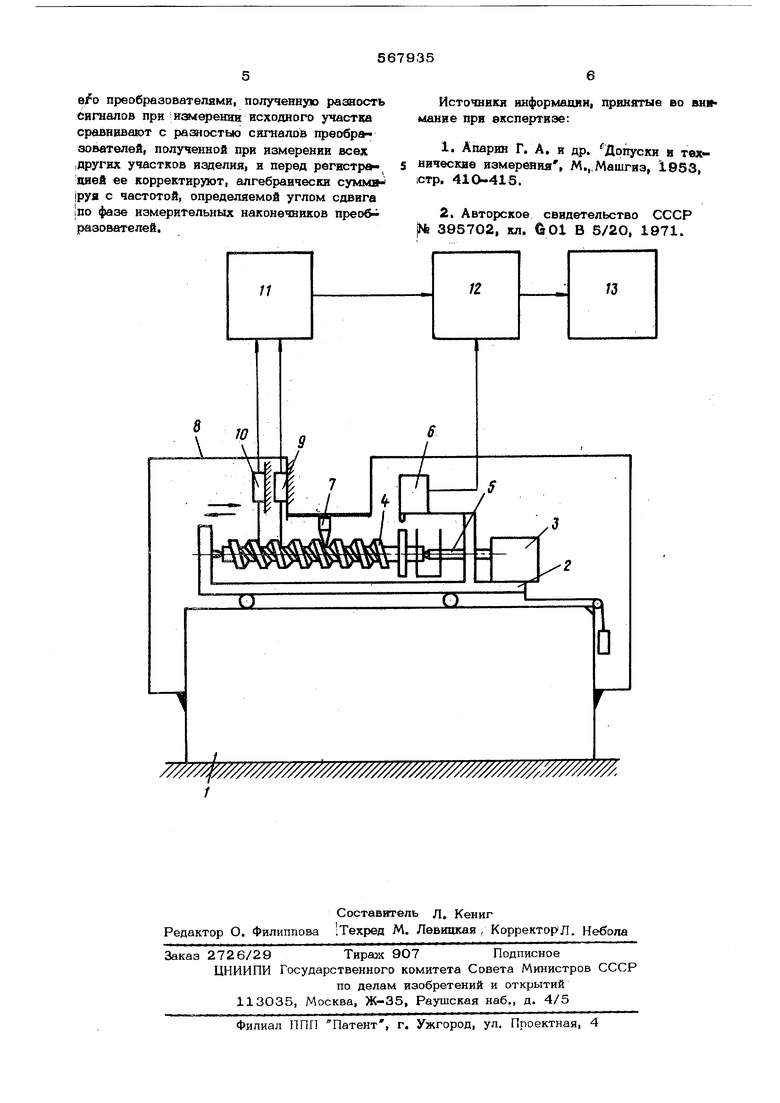
На чертеже изображена прюэдипиальная схема стационарного прибора, реализующего способ.
Прибор включает основание 1, по которому перемещается каретка 2 с приводом вращения 3 измеряемого изделия 4 и прио пособпеннем 5 для крепления изделия, уэлом 6 Синхронизации фазового сдвига мезкч ду наконечнщсами преобразователей с чао тотой следования команд-импульсов. Упор 7, иммитирующий однозубную гайку, закреплен на кронштейне 8, связанном с основанием Is На том же кронштейне 8 уотановлены два преобразователя 9 и 10 с возможностью настройки измерительных наконечников на заданный уг&Л- сдвига по фазе
Сигналы преобразователей 9 и 1О подаются в электроблок 11 регистрации, где производится их вычитание. Разность сипналов преобразователей 9 и 1О поступает в сумматор 12, в котором по командам узла 6 синхронизации производится их сум мирование. Суммарный сигнал подается для записи на самописец 13 или регистрич руется в виде цифровых значений.
Прибор работает следующим образом. Контролируемое изделие 4 устанавливаю в приспособлении 5 подвижной каретки 2. Далее устанавливают измерительные наконечники преобразователей; на принятый сдвиг и соответственно настраивают узел синхронизации В процессе измерения колебания расстояний между измерительными наконечни1сами i по сравнению С расстояние исходного участка вызывают соответствую щие сигналы преобразователей 9 и Ю, разность которых непрерывно подается в блок 11 регистрации и на сумматор 12. , По командам узла 6 синхронизации в сумматоре 12 производится сложение мгно венных значений разностей сигналов преобразователей, поступающих из блока 11, После этого скорректированный суммарный сигнал подается на самописец.
Регистрация скорректированных в сумматоре 12 разностей может быть проведен с записью самописцем 3 в виде ряда ординат для определения формы проявления и величины действительных периодических погрешностей шага винтовых поверхностей. При обработке результатов измерений в этом случае для получения функции погреш костей с учетом как периодических, так и накопленных погрешностей, определяют
действительную погрешность от начала из мерения до любой заданной точки по длине иаде ЛИЯ гаобым известным способом,ординату аапи- си,соотввтствующутй заданной точке,приршанивают к значению действительной погрешноо-: ти. Затем соединяют прямой ллнией точки начала отсчета с точкой приравнен ной ординаты записи и от указанной прямой линии определяют ординаты записи действр{
тельной погрешности шага винтовых поверхностей.
Регистрации скорректированных разностей может быть также произведена путем вы дачи Ш-1ФРОВЫХ значений. при котором олр
деляют действительную, погрешность П от на чала измерения до любой заданной точвд по длине изделия любым, известным способом и приравнивают ее «скорректированное му цифровому значению сигнала, полученногн
при измерении данныта способом рассто,чния от начала измерения ;до заданной точки,,
Поправка к Щ1фровому значеншо исход-: ного участка и каждого последую цагс К --тг равна разности между величиной дейсгвитель
ной погрешности П и В- велич:шюй зарегистрированного скорректированного сигна- ла заданной точки, деленной на число уче.С1 ков 11 . При этом для каждого последую щего участка поправка увеличиваетск на
величину поправки первого участка. Далее полученные поправки суммируют со скоррек тированными сигналами; зарегистрирован™ ными при измерении участков опнсьшаемым способом,
Полученные результа-г,,: ..,i:)i:-.Ei;air;:
определяют действительные эначения nor.решностей шага винтовых поверхностей нй всей измеряемой длине«
Формула изобретения
Способ автоматического измерения пог решностей шага винтовых поверхностей из делий, например ходовых винтов, заключающийся в том, что устанавливают со сдвигом по фазе два преобразователя, электрически связанные с блоком регистрации и имеющие и мерительные наконечники, взаимодействую- щие с поверхностью изделия, изделию и преобразователям сообщают относительные синхронные перемещения по времени, рав ному перемещению изделия на один шаг и соответствующему времени одного оборота относительно оси изделия, и регистрируют непрерывно поступающую разность сигналов преобразователей, отличающийс я тем, что, с целью повышения произво дительности и точности измерения, выбирают исходный участок на изделии и измеряют
е/о преобразователями, полученную разность Сигналов при намерении исходного участвд сравнивают с разностью сигналов преобразователей, полученной при измерении всех |Другнх участков изделия, и перед регистрацией ее корректируют, алгебраически руя с частотой, определяемой углом сдвига I по фазе измерительных наконечников преобразователей.
Источники информадии, принятые во вня мание при акспертизе:
1.Апарин Г. А. и др. Допуски н технические измерения , М., Машгиз, 1953
iCTp. 410-415.
2.Авторское свидетельство СССР 395702, кл. GOI В 5/20, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения температуры | 1983 |
|
SU1136032A2 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОВОЙ ПРУЖИНЫ ПУТЕМ НАВИВКИ И ПРУЖИНОНАВИВОЧНАЯ МАШИНА | 2011 |
|
RU2469811C1 |
| Прибор для контроля ходовых винтов станков | 1981 |
|
SU986613A1 |
| Устройство для измерения температуры | 1988 |
|
SU1672237A1 |
| СПОСОБ ДИСКРЕТНОГО КОНТРОЛЯ РАССТОЯНИЙ ДО ИСТОЧНИКА КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2028579C1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Способ поверки преобразователей углапОВОРОТА ВАлА B КОд и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU824265A1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
