Изобретение относится к системам автоматического контроля преобразователей неэлектрических величин в дискретный электрический сигнал и может быть использовано для поверки преобразователей угла в унитарный код.
Известны способы для-контроля преобразователей угла поворота вала в код и устройства, реализугацие способ основанные на том, что угловое положение валов роторов двух преобразоваталей остается неизменным в процессе контроля .
Недостатком их является низкая точность.
Известны также способы и устройства для поверки круговых преобразователей угла в унитарный код в процессе синхронного вращения роторов поверяемого и образцового преобразователей путем сравнения по фазе электрических сигналов с их выходов 2 .
Их недостатком таюке является низкая точность.
Наиболее близким к предлагаемому по технической сущности является устройство для аттестации преобразователей угла поворота в код, которое содержит станину, поворотную платформу, связанную со станиной через подшипник, шпиндель, размещенный на . поворотной платформе и связанный с нею через другой подшипник, электропривод вращения шпинделя, образцовый и поверяемый преобразователи угла поворота в код, расположенные, соответственно, на, нижнем и верхнем торце шпинделя и хсестко. связанные с
d ним своими роторами, статор образцового преобразователя посредством механизма фиксации связан со станиной, а.статор поверяемого преобразователя посредством другого механизма фикса5ции - с поворотной платформой, элементы поворота и фиксации указанной платформы относительно станины, г также фазометр с самописцем.
Поверка преобразователей заключае-гся в следующем.
Включают электропривод вращения шпинделя и вращают роторы преобразователей. При этом электрические сигналы с выходов преобразователей
5 поступают в фазометр и разность их фаз регистрируется самописцем в виде диаграммы, которая отражает в определенном масштабе разностную погрешность поверяемого и образцового пре0образователей, т. е. функцию погреш«ости поверяемого преобразователя по отношению к образцовому от угла поворота роторов. После записи диаграммы электропривод выключают, снимают фиксацию платформы и поворачивают ее относительно станины, совместно со статором поверяемого преобразователя на некоторый угол. Затем платформу снова фиксируют и, вращая роторы, производят вторую запись. Таким же образом выполняют записи остальных диаграмм при дискретных угловых положениях платформы в пределах от О до 360. Начала записей всех диаграмм регистрируют отметчиком оборотов, который связан со шпинделем. Полученное семейство диаграмм изображает функцию разностной погрешности преобразователей от угла поворота роторов и от углового положения статора поверяемого преобразователя. Диаграммы совмещают по отметкам начала записей и полученное семейство совмещенных диаграмм используют для оценки погрешности поверяемого преобразователя, которую выполняют графоаналитическим путем. Следовательно, указанное устройство позволяет выполнять совокупные измерения (см. ГОСТ 16263-70) и, путем обработки их результатов, определять функцию погрешности поверяемого преобразователя от угла поворота его ротора.
Известный способ поверки преобразователей и устройство для его осуществления позволяют выполнять серии измерений без переустановок роторов преобразователей по отношению к шпинделю, что значительноповы шает точность измерений д.
Однако сложность графоаналитической обработки результатов для нахождения искомой функции является недостатком этого устройства и способа измерения.
Другой недостаток состоит в нестабильности масштаба диаграмм по оси абсцисс. Она возникает из-за того, что движение ленты в регистрирующем приборе является функцией времени и производится от автономного привода, тогда какрегистрируемая величина является функцией угла поворота роторов преобразователей, вращаемых от другого привода. Это создает дополнительные трудности и погрешности при обработке результатов, Цель изобретения - повышение точности поверки преобразователей угла поворота вала в код.
Поставленная цель достигается тем что в способе поверки преобразователей угла поворота вала в код, основанном на измерении и регистрации разности выходных сигналов образцового и поверяемого преобразователей при синхронном вращении их валов и определении погрешности поверяемого
преобразователя путем анализа упомянутых разностей выходных сигналов, совмещенных по одинаковому угловому положению валов, измерение и регистрацию разности выходных кодов производят при дискретном угловом положении статора образцового преобразователя в диапазоне О - 360°, а погрешность определяют в виде огибающей разностей выходных сигналов.
В устройство для осуществления способа, содержащее поворотную платформу, установленную в станине, укрепленный на поворотной платформе статор поверяемого преобразователя, привод вращения, кинематически связанный с валами образцового и поверяемого преобразователей, выходы которых подключены к измерительному блоку, а выход измерительного блока под ключен к .регистрирующему блоку, введен дополнительный поворотный механизм, корпус которого укреплен на станине, а выходной вал жестко соединен с корпусом образцового преобразователя, привод вращения кинематически связан с регистрирующим блоком. На фиг. 1 изображено устройство для осуществления способа; на фиг. 2дкаграЕ шы, поясняющие способ нахождения искомой функции.
В состав устройства входит станина 1, в которой установлен а поворотная платформа 2, в центральном отверстии платформы 2 установлен на подшипнике шпиндель 3 с предметным столиком 4, платформа 2 связана посредством конической 5 с маховиком 6, служащим для поворота платформы, на платформе 2 установлен кронштейн 7. Платформа снабжена также болтами 8, головки которых размещены в Т-образном кольцевом пазе станины, в нижней части шпинделя 3 установлен образцовый преобразователь 9 и электропривод 10 вращения шпинделя, на предметном столике 4 установлен поверяемый преобразователь 11 статор которого через механизм 12 фиксации связан с кронштейном 7, статор образцового преобразователя 9 через синхронную муфту 13 связан со шпинделем поворотного механизма 14 (например;, оптическая делительная головка) , корпус которого закреплен на станине 1,. электрические выходы преобразователей 9 и 11 соединены со входами измерительного блока 15, выход которого соединен со входом отклоняющей системы регистрирующего блока 16. Ведущий вал редуктора в лентопротяжном механизме регистрирующего блока 16 кинематически связан с приводом 10 и со шпинделем 3.
Поверку выполняют следующим образом.
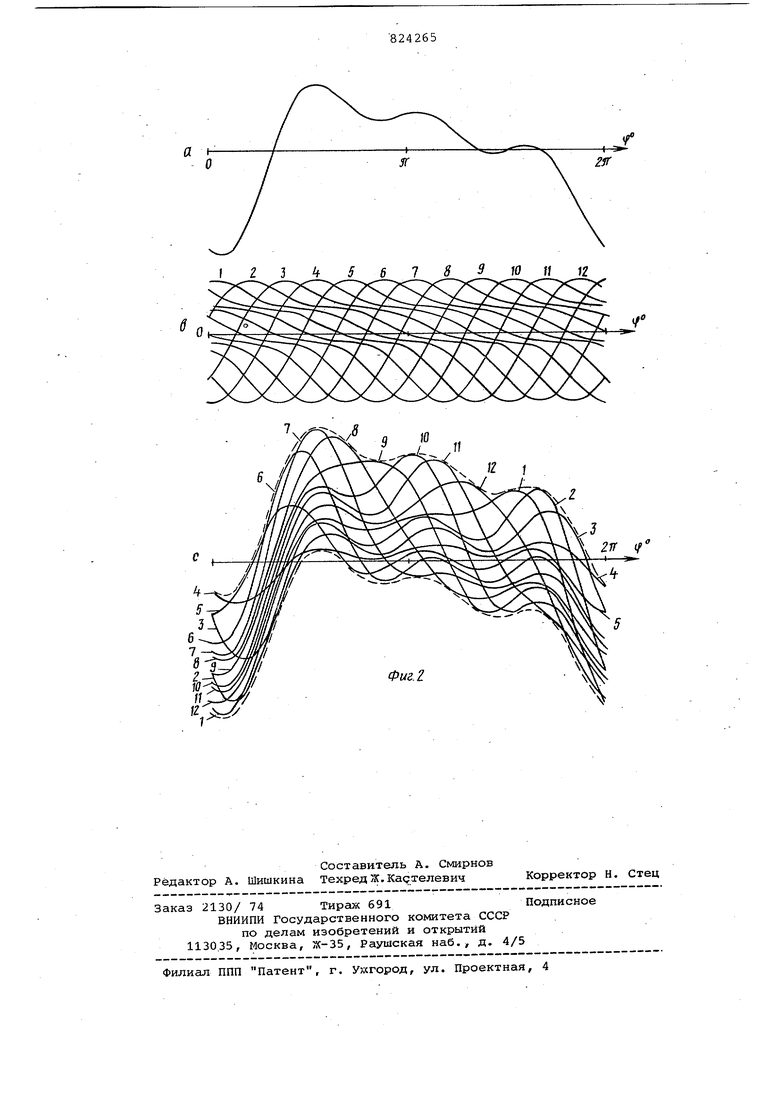
На предметный столик 4 устанавливают .поверяемый преобразователь 11 и после регулировки положения его ротора относительно оси вращения шпин деля 3, статор его закрепляют при помощи механизма 12 фиксации к крон штейну 7 платформы. 2. Платформу 2 фиксируют в заданном положении болтами 8. Оси вращения шпинделя 3 и шпинделя поворотного механизма 14 совмещают с максимальной точностью (например, 0,005 - 0,01 мм), после чего корпус механизма 14 закрепляют на станине 1. Перед каждым измерением стопорят шпиндель пово отного механизма 14. Включают электро привод 10 вращения шпинделя 3. Сигн лы с выходов преобразователей 9 и 11 поступают в измерительный блок 15. Разность выходных кодов преобра зователей 9 и 11 регистрируется на ленте самопишущего прибора в виде диаграммы, изображающей функцию разностной погрешности одного преобразо вателя по отношению к другому. После записи диаграммы (один или несколько оборотов шпинделя 3} электропривод 10 выключают. Стопор поворотного механизма 14 ослабляет и его шпиндель а вместе с ним через муфту 13 и статор образцового преобразователя 9, поворачивают на заданный угол, после чего шпиндель поворотного механизма снова стопорят. Запись второй диаграммы производят аналогично первой Таким же образом производят записи всех остальных диаграмм при повороте статора преобразователя 9 на дискретные значения углов в пределах от О до 360°. Начала записей всех диаграмм регистрируются отметчиком оборотов, который связан со шпин делем 3 (на фиг. 1 не показан). После этого все диаграммы совмещшот по отметкам начала записей, а также по оси абсцисс, и получают семейство кривых - совмещенные диаграммы функций разностных погрешностей преобразователей 9 и 11 от угла поворота их роторов, а также от углового положения статора образцового преобразователя 9. На фиг, 2 с изображено указанное семейство кривых. Цифрами обозначены порядковые номера функций, получаемых при дискретных угловых смещениях статора образцового преобразователя. Каждая из этих функций получена результате вычитания из неизвестной функции X ( ц ) (изображенной на фиг. 2а) другой неизвестной функции у ( Ц) ) (изображенной на фиг. 2Ь) под соответствующим порядковым номером. При этом X (tp ) и у ( ф ) соответственно функции погрешности поверяёмо.го и образцового преобразователей от угла поворота их роторов, значения которых не известны. Например, функция с порядковым номером 4 (фиг. 2 с) является разностью неизвестных функций, соответствующих .фиг. 2 а и функции с порядковым номером 4 на фиг. 2 в. При дискретных угловых смещениях статора преобразователя 9 начальная фаза функции его погрешности смещается вдоль оси абсцисс, принимая положения в соответствии с порядковыми номерами на фиг. 2 в. При этом из любой ординаты искомой функции (фиг. 2 а) поочередно вычитаются все текущие значения у функции погрешности образцового преобразователя, в том числе и ее экстремальные положительные Уп,а,и отрицательные у ;„значения. Поэтому максимальное А и минимальное A.; ;jpHaчения ординат в каждой из точек оси абсцисс семейства совмещенных диаграмм: представляют разность ординаты х искомой функции в этой точке оси и, соответственно, значений mtn Ушах т. е. Aimo(x - Ymin nuTi - Уп,ау. Следовательно верхняя огибающая семейства совмещенных диаграмм (фиг. 2 с), как геометрическое место всех ординат со значениями А,, представляет функцию X ( qi ) - , , а нижняя огибающая, как геометрическое место всех ординат со значениями ,n- функцию X (ср ) - . Это означает, что огибающие линии семейства совмещенных диаграмм (штриховые линии на фиг. 2 с) представляют функцию погрешности поверяемого преобразователя в масштабе, аналогучном масштабу регистрации разностной погрешности. Функции, соответствующие верхней и нижней огибающим, идентичны, но смещены относительно оси абсцисс на некоторые значения (угпах и Ymin) Очевидно, что для выявления высших гармонических составляющих искомой функции, число дискретных угловых положений статора преобразователя 9, а следовательно, и количество кривых всемействе совмещенных диаграмм, должно быть достаточным, чтобы линия, огибающая их вершины, могла отразить интересующую высшую гармонику. Погрешность преобразователя 9 мо-. жет быть сравнимой и даже превышать погрешность поверяемого преобразователя 11 при условии, что функция его погрешности по углу поворота ротора достаточно стабильна и не имеет значительной случайной составляющей. функцию погрешности образцового преобразователя необходимо знать и периодически контролировать. Для периодического контроля функии погрешности преобразователя 9 спользуют поворотную платформу 2. этой целью на предметный столик устанавливают и закрепляют указаным способом преобразователь 11. Заиси семейства диаграмм выполняют ри неподвижном статоре образцового реобразователя 9, когда поворотный еханизм 14. постоянно застопорен, а оворотную платформу 2 от записи к записи смещают на дискретные значения угла в пределах от О до 360°, Обработку результатов производят ана логичным образом с тем отличием, что огибающая линия семейства совмещенны диаграмм отображает функцию погрешности образцового преобразователя 9 от угла поворота его ротора. Таким образом, способ поверки преобразователей угла поворота вала в код и устройство для его осуществления позволяют существенно повысить точность измерения без увеличения точности образцового преобразователя. Формула изобретения 1. Способ поверки преобразователей угла поворота вала в код, основанный на измерении и регистрации р ности выходных сигналов образдового и поверяемого преобразователей при синхронном вращении их валов и опре делении погрешности поверяемого пре образователя путем анализа упомянутых разностей выходных сигналов, со мещенных по одинаковому угловому положению валов, отличающийся тем,, что с целью повыше. НИН точности поверки, измерение и регистрсщию разности выходных сигналов производят при дискретном угловом положении статора образцового преобразователя в диапазоне О-ЗбО, а погрешность определяют в виде огибающей разностей выходных сигналов. 2. Устройство для осуществления способа по п. 1, содержащее поворотную платформу, установленную в станине, укрепленный на поворотной платформе статор поверяемого преобразователя, привод вращения, кинематически связанный с валами образцового и поверяемого преобразователей, выходы которых подключены к измерительному блоку, а выход измерительного блока подключен к регистрирующему блоку, отличающееся тем, чтов него введен дополнительный поворотный механизм, корпус которого укреплен на станине, а выходной вал жестко соединен с корпусом образцового преобразователя, привод вращения кинематически связан с регистрирующим блоком. Источники информации, принятые во внимание при экспертизе 1.Ахметжанов А. А. Системы передачи угла повышенной точности. М., Энергия, 1966, 257-262. 2.Авторское свидетельство СССР № 466534, кл. G 08 С 25/00, 1974. 3.Авторское свидетельство СССР по заявке № 2601252/18-24, ,чл. G 08 С 25/00, 1978.
и II 2 3 4 5 б 7 5 10 ff ,2

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для аттестации преобразователей угла поворота в код | 1978 |
|
SU694884A1 |
| Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1656681A1 |
| Устройство для контроля преобразователейуглА пОВОРОТА ВАлА B КОд | 1979 |
|
SU842916A1 |
| СПОСОБ ПОВЕРКИ ПРЕОБРАЗОВАТЕЛЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2060585C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОГРЕШНОСТИ ПРЕОБРАЗОВАТЕЛЯ ПОВОРОТА ВАЛА В КОД | 2014 |
|
RU2559174C1 |
| Способ проверки преобразователя угла поворота вала в код | 1983 |
|
SU1238235A1 |
| УСТРОЙСТВО КОНТРОЛЯ ТОЧНОСТИ АНАЛОГОВОГО И ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЕЙ УГЛА | 2014 |
|
RU2575467C1 |
| Устройство для автоматической поверки электроизмерительных приборов | 1980 |
|
SU930185A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Устройство для поверки тензометрических весов | 1986 |
|
SU1415069A1 |