1
Изобретение относится к системам регулирования многодвигательных электрогфиводов постоянного тока и может быть использовано для электроприводов прокатных станов.
Известны способы выравнивания токов нагрузки между двигателями воздействием на их ток возбуждения.
Один из известных способов заключается в воздействии на токи возбуждения двигателей таким образом, чтобы при увеличении тока возбуждения одного двигателя уменьшался ток возбуждения второго 1
Вописанном способе выходной сигнал УВН не ограничивается- Это приводит к тому, что ток возбуждения одного из двигателей может чрезмерно увеличиваться, а второго - соответственно уменьшаться.
Известен также способ вырав1твания нагрузок двигателей постоянного тока 2 , заключающийся в воздействии на возбудители в функции суммы сигналов задания на ГОК возбуждения и сигнала, пропорционального разности токов нагрузки.
Наиболее близким к изобретению является способ выравнивания токов нагрузки двигателей постоянного тока 3j , заключающийся в воздействии на возбуждение двигателей в функции величины разности сигналов, пропорциональных токам нагрузки двигателей, с одновременным ограничением токов возбуждения двигателей и предусматривающий указанное ограничение постоянным
по величине. При двухфазном регулировании скорости двигателя в известном способе выравнивания токов нагрузки двигателей постоянного тока ток возбуждения двигателя определяется алгебраической суммой сигнала основного задания и выходного сигнала регулятора выравнивания токов нагрузки. Последний сигнал выбирается нз условия ограничения отклонения тока возбуждения двигателя на некоторую величину
Л от номинального значения тока.
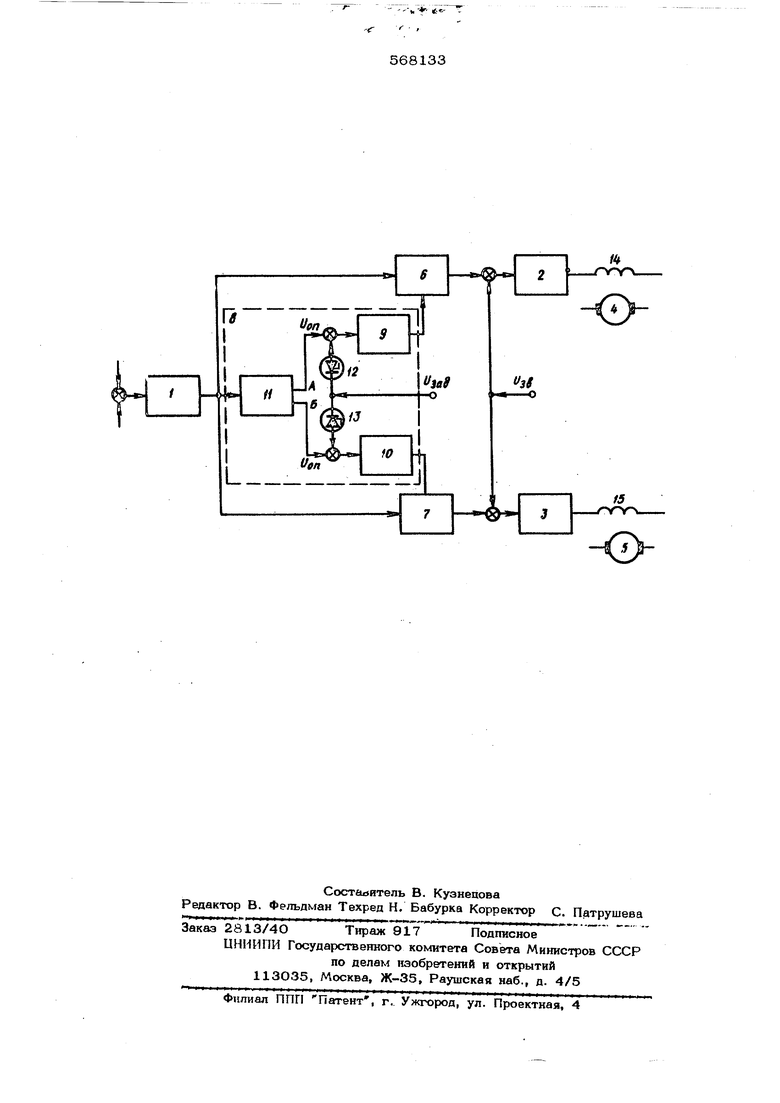
Для выявления недостатков, присущих исзвестным способам, рассмотрим выравнивание токов нагрузки при регулировании скорости двигателей от номинальной (поток двигателя полный) до максимальной (поток двигателя минимальный). В рассматриваемом способе ток возбуж дения двигателя определяется алгебраической суммой сигнала основного задания и выходного сигнала регулятора выррвнивания нагрузок (РЗН), максимальное зна ние последнего выбирается из условия ограничения отклонения тока возбуждения двигателя на некоторую величину ± Д J ( 1 от номинального значения, При этом предельные значения тока воз буждения можно записать в следующем виде:максимальный ток 3g макс ПР скорти двигателя номинальной (или ниже) и максимальном сигнале на выходе РВН 1 Вл1ахс 1 Лрви (П минимальный токС/цд у | при максимал ной скорости двигателя и максимальном сигнале на выходе РВН JBMHH (1 )ьо, (2) где ток. возбуждения, соответствующий максимальной скорости двигателя; « а - „ - кратность изменения тока воз бужденйя при регулирований скорости полем , двигателя (может, колебаться в пределах oL S-4J Для обеспечения достаточной эффек тиьности РВН максимальный сигнал на его выходе принимаеггся таким, чтобы вызвать отклонение тока возбуждения не менее, чем Дл/бн 0-1 б,н , , (з), оцеУчитывая уравнения (1) выделяемые в обмотке врзбуж ним потери, дения: В МАКС во &н ) т.е. потери в обмотке возбуждения на 20% древышают номинальные. Прин5Ш кратность изменения , из уравнения (2), можно оценить минималь ное значение тока возбуждения во 0 мин : Такое уменьшение тока возбуждения мо жет привести при механически несвязанных валах двигателей к аварийному повышению скорости, а при механически связанны валах - к отклонению привода от воздействия реле нулевого тока возбуждения. Таким образом, недостатки известных способов и устройств выравнивания токов нагрузки заключаются в возможности значи тельного перегрева обмоток возбуждения двигателя и аварийного отключения привода По предлагаемому способу с целью по- выщения надежности работы систем регулирования скорости двигателя ограничение TO ов возбуждения двигателей выполнено реулируемым в функции знака разности сигалов, пропорциональных токам нагрузки, исигала задания тока возбуждения. На чертеже представлена схема устройтва реализующего предложенный способ. ыходной сигнал регулятора 1 выравниваНИ57 токов нагрузки, суммирующийся с осовным сигналом задания IT поступат на входы регулируемых возбудителей 2, 3 двигателей 4, 5 через управляемьш оганичители 6, 7 сигйала. Управление ограичителями б, 7 осуществляется сигналаи, которые формируются звеном 8, на вход которого поступают выходной сигнал регулятора 1 и сигнал, определяющий требуеый ток возбуждения Uionнапример о 5 / задание на скорость двигателя при двухзонном регулировании с зависимым управлением полем. Выходное напряжение звена 8 формируется таким образом, что ток возбуждения, определяемый суммарным задающим сигналом регулятору возбуждения, изменяется от номинального до максимального. Рассмотрим пример работы устройства, реализующего звено 8. Управление ограничителями 6, 7 осуществляется при помощи .усилителей 9, 10 входящих в звено 8, в которое включены также нуль-индикатор 11 и стабилитроны 12, 13. Пусть ток нагрузки двигателя 4 больше тока двигателя 5, тогда ток обмотки возбуждения 14 нужно увеличивать , а ток обмотки возбуждения 15 уменьшать. На входе каждого усилителя 9 и 10 сигналы LTпоступающие с прямого А и инверсного Б выходов нуль-индикатора суммируются с сигналом. пределяющим скорость двигателя. При двухзЬнном регулировании скорости сигнал заа определяет ток возбуждения двигателя при изменении .скорости от основной до максимальной. Для рассматриваемого распределения нагрузок сигнал U имеет место только на выходе Б нуль-индикатора 11. При изменении сигнала от нуля до напряжения пробоя l/r-r. стабилитронов 12, 13, что соответствует изменению скорости от нуля до основной, на входе усилителя 9 задающие сигналы отсутствуют, а на входе усилителя 10 имеет место посто5шный сигнал в результате этого сигнал на выходе усилителя 9 равен О и сигнал регулятора 1 на вход возбудителя 2 не поступает, а на выдоде усилителя 10 - максимальный, т.е. на вход возбудителя 3 поступает максима ный сигнал регулятора 1. Таким образом, при сигнале Uia , соот ветствующем номинальному току возбуждения двигателей, сигнал ga выходе регулятора 1, суммирующийся с основным, на вход возбудителя 2 не поступает, а сигнал на выходе регулятора 1, вычитающийся из основного, посгупает на вход возбудителя 3 беспрепятственно. При дальнейшем увеличении сигнала t/ja на входы усилителей 9 и 10 поступает сиг нал Ut ай- (г а .основной сиг нал задания на ток возбуждения С/,, умень шается, в результате чего на выходе уци лителя 9 появляется сигнал, изменяющийся таким образом, чтобы сумма сигналов на входе возбудителя 2 не превышала зада ния на номинальный ток возбуждения двигателя 4, что достигается -выбором коэф.. фиииента усиления усилителя 9 при соответ ствующей полярности его выходного сигнала; максимум выходного сигнала усилителя 9 соответствует заданному отклонению тока возбуждения и сигнал на выходе усилителя 10 остается минималыштм до тех пор, пока .ток возбуждения не уменьшится до некоторого заданного значения во в Дальнейшее уменьшение тока возбуждегая, т.е. увеличение ад приводит к уменьшению сигнала на выходе усилителя 10 таким образом, чтобы разность сигналов на выходе возбудителя 3 не была меньше задания на минимальный ток обмотки возбуждения 15, требуем.ая характеристика усилителя 10 достигается выбором коэффициента усилия при соответствующей п Л5фности его выходного сигнала. При изменении поля{эиости сигнала на выходе регулятора 1 имеет место напряжс ние только на выходе А нуль-индикатора 11, сигнал UQ- подается на вход усилителя 9, дальнейшая работа схемы аналогична описанной. Таким образом, рассмотренный способ выравнивания токов нагрузки двигателей исключает возможность перегрева обмоток возбуждения двигателей, так как суммарный сигнал на входе возбудителей 2, 3 не может превышать задания на номинальный ток возбуждения} предотвращает возможность аварийного отключения двигателей,так как разность сигналов на входе возбудителя не может быть ниже величшы, обеспечивающей заданный минимальный ток возбуждения. Формула изобретения Способ вырав1гава1шя токов нагрузки двигателей посто$шного тока, согласно которому регулируют токи возбуждения двигателей в функпии величины разности сигналов, пропорциональных токам нагрузки двигателей, и одновременно ограничивают токи возбуждения двигателей, отличающийся тем, что, с целью повышения надежности,, работы,величину ограничения токов возбуждения изменяют в функции знача разности сигналов, пропорциональных токам нагрузки и сигнала задания токов возбуждения. Источники информации, принятые во внимание Лри экспертизе: 1.Авторское свидетельство СССР № 2О8О89, Н 02 Р 5/50, 1968 г. 2.Проект ВНИИЭлектропривод О82.839, М., 1969 г. 3.Пате.нт ГДР № 30148, НКИ 21 С 62/05, 1964 г568133
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления возбуждением двигателя постоянного тока | 1989 |
|
SU1718358A2 |
| Способ управлением током возбуждения синхронного электродвигателя в послеаварийных процессах энергосистемы | 2017 |
|
RU2658741C1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| Способ управления профилегибочным агрегатом и устройство для его осуществления | 1987 |
|
SU1447486A1 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Электропривод переменного тока | 1986 |
|
SU1367123A1 |