но-направляющих механизмов выполнены в виде цепных передач, кинематически связанных с ходовыми катками прицепной рамы. Каждый датчик автоматической подачи цепного конвейера вылоднен в виде катка, верТикально установленного на соответствующем захвате этого .конвейера и взаимодействующего с трубой, .находящейся на роликах ниЖнего ложа бункера.
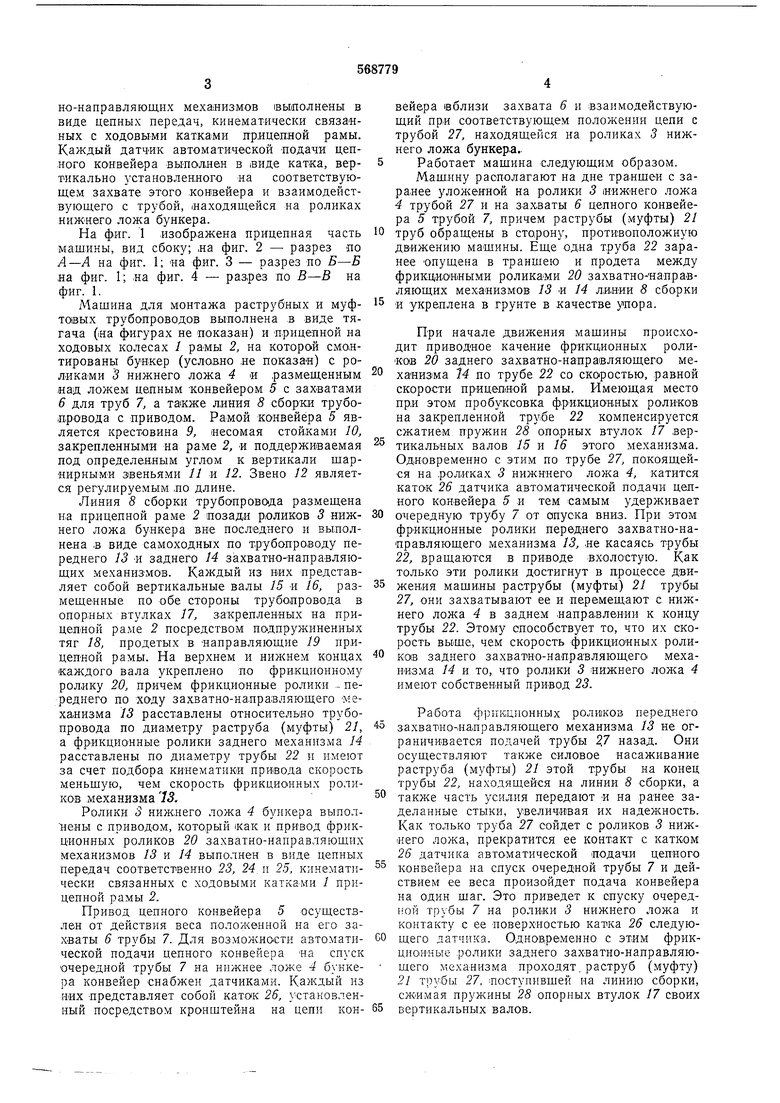
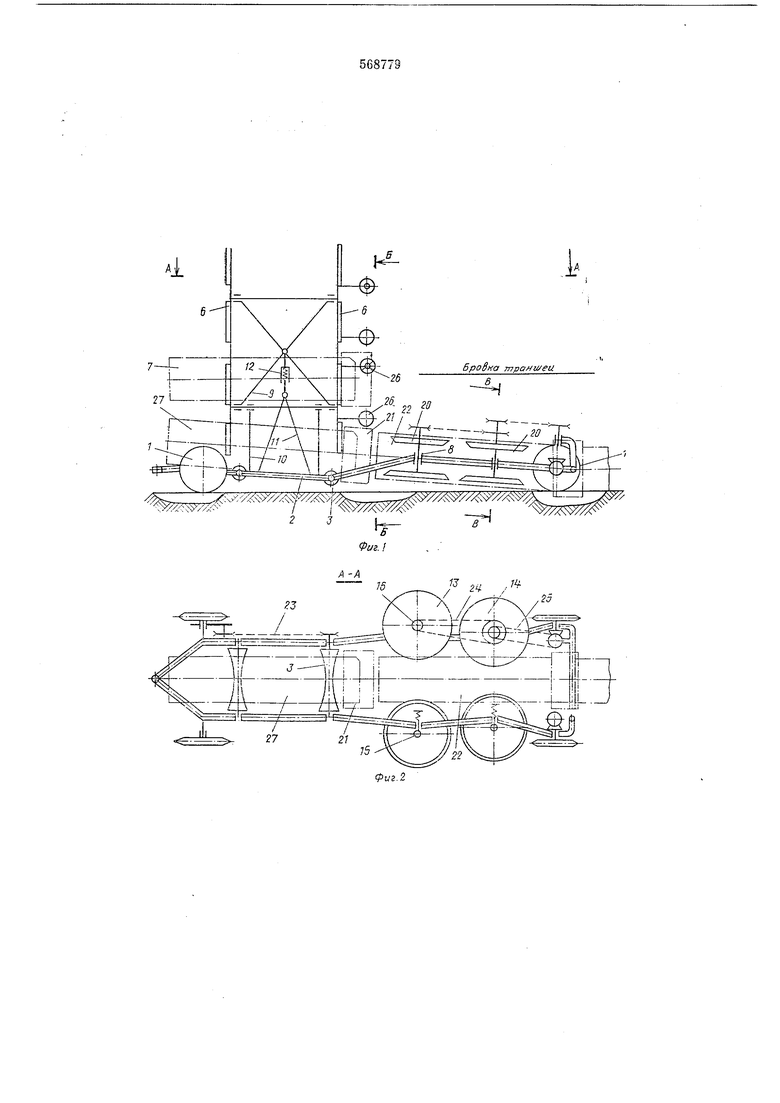
На фиг. 1 .изображена прицепная часть машины, вид сбоку; ,на фиг. 2 разрез по Л-Л на фиг. 1; па ф.иг. 3 - разрез по Б-Б на фиг. 1; ,на фиг. 4 - разрез по В-В на фиг. 1.
Машина для монтажа раструбных и муфТ01ВЫХ трубопроводов выполнена .в виде тягача (iHa фигурах не показан) и прицепной на ходовых колесах 1 рамы 2, на которой смонтированы бункер (условно не показан) с роликами 5 нижнего ложа 4 « .размещенным над ложем цепным ко.нвейером 5 с захватами 6 для труб 7, а также линия 8 сборки трубопровода с приводом. Рамой конвейера 5 является крестовина 9, несомая стойками 10, закрепленными на раме 2, и поддерживаемая под определенным углом к вертикали шарнирными З1веньями // и 12. Звено 12 является регулируемым по длине.
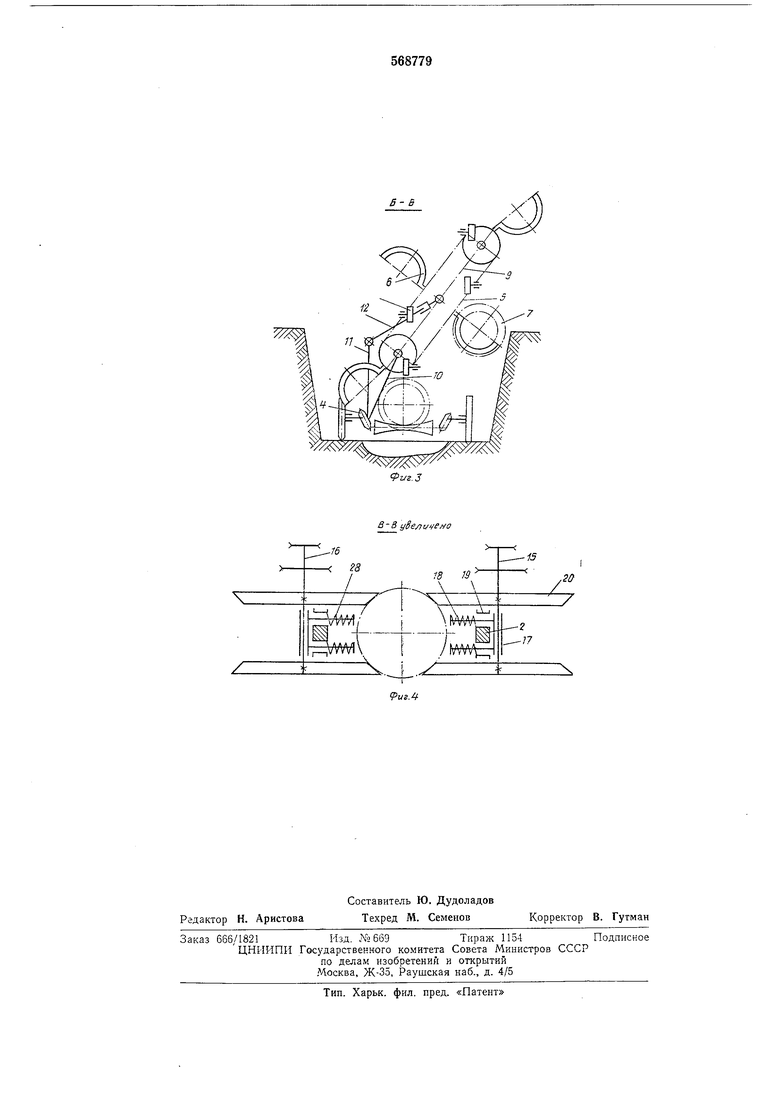
Линия 8 сборки трубопровода размещена на прицепной раме 2 позади роликов 3 нижнего ложа бункера вне последнего и выполнена ,в виде самоходных по трубопроводу переднего 13 И заднего 14 захватно-направляющих механизмов. Каждый из них представляет собой вертикальные валы 15 н 16, размешенные по обе стороны трубопровода в опорных втулках 17, закрепленных на прицепной раме 2 посредством по дпружинен.ных тяг 18, продетых в направляющие 19 пр.ицепной рамы. На верхнем и нижнем концах каждого вала укреплено по фрикционному ролику 20, причем фрикционные ролики - переднего по ходу захватно-направляющего механизма 13 расставлены относительно трубопро.вода по диаметру раструба (муфты) 21, а фрикционные ролики заднего механизма 14 расставлены по диаметру трубы 22 и имеют за счет подбора кинематики привода скорость меньшую, чем скорость фрикционных роликов механизма 13.
Ролики .5 ниж.него ложа 4 бункера выполнены с приводом, кото.рый «ак и привод фрикционных роликов 20 захватно-направляюших механизмов 13 и 14 выполнен в виде цепных передач соответственно 23, 24, и 25, кннематически связанных с ходовыми катками 1 прицепной рамы 2.
Привод цепного конвейера 5 осуществлен от действия веса положенной иа его захваты 6 трубы 7. Для воэмолсности автоматической подачи цепного конвейера на спуск очередной трубы 7 на нижнее ложе 4 бункера конвейер снабжен датчиками. Каждый из них представляет собой каток 26, установленный посредством кронштейна на цепи конвейера вблизи захвата 6 и взаимодействующий при соответствуюшем положении цепи с трубой 27, находящейся на роликах 3 нижнего ложа бункер.а.
Работает машина следующим образом.
Маш.ину располагают на дне траншеи с заранее улол :енной на ролики 3 нижнего ложа 4 трубой 27 и на захваты 6 цепного конвейера 5 трубой 7, причем раструбы (муфты) 21 труб обращены в сторону, противоположную движению машины. Еще одна труба 22 заранее опущена в траншею и продета между фрикционными роликами 20 захватно-направляющих механизмов 13 и 14 линии 8 сборки и укреплена в грунте в качестве упора.
При начале движения машины происходит приводное качение фрикционных роликов 20 заднего захватно-направляющего механизма 74 по трубе 22 со скоростью, равной скорости прицепной рамы. Имеющая место при этом пробуксовка фрикционных роликов на закрепленной трубе 22 компенсируется сжатием пружин 28 опорных втулок 17 вертикальных валов 15 и 16 этого механизма. Одновременно с этим по трубе 27, покоящейся на .роликах 3 нижннего 4, катится като1К 261 датчика автоматической подачи цепного конвейера 5 .и тем самым удерживает очередную трубу 7 от опуска вниз. При этом фрикционные ролики переднего захватно-направляющего механизма 13, не касаясь трубы 22, вращаются в приводе вхолостую. Как только эти ролики достигнут в процессе движения машины раструбы (муфты) 21 трубы 27, они захватывают ее и перемещают с нижнего ложа 4 в заднем направлении к концу трубы 22. Этому способствует то, что их скорость выше, чем скорость фрикционных роликов заднего захватно-направляющего механизма 14 и то, что рол.ики 3 нижнего ложа 4 имеют собственный привод 23.
Работа фрикционных ролнкоз переднего захватно-налравляющего механизма 13 не ограничивается подачей трубы 2J назад. Они осуществляют также силовое насаживание раструба (муфты) 21 этой трубы на конец трубы 22, находящейся на линии 8 сборки, а также часть усилия передают и на ранее заделанные стыки, увеличивая их надежность. Как только труба 27 сойдет с роликов 3 нижнего ложа, прекратится ее контакт с катком 26 датчика автоматической подачи цепного конвейера на спуск очередной трубы 7 и действием ее веса произойдет подача конвейера на один шаг. Это приведет к спуску очередной трубы 7 на ролики 3 нижнего ложа и контакту с ее поверхностью катка 26 следующего датчика. Одновременно с этим фрикцио-н«ь е .ролики заднего захватно-направляющего механизма проходят.раструб (муфту) 21 трубы 27, поступившей на линию сборки, сжимая пружины 25 опорных втулок 17 своих вертикальных валов.
Формула изобретения
1.Машина для монтажа раструбных и муфтовых трубопроводов, выполненная в виде тягача и .прицепной на ходовых колесах рамы, на которой смонтированы бункер с роликами нижнего ложа и размещенным над ложем цепным конвейером с захзатамИ для труб и линия сборки трубопровода с приводом, отличающаяся тем, что, с целью повышения надежности стыковых соединений трубопровода, линия сборки размещена на прицепной раме позади нижнего ложа бункера вне последнего и вынолнена в виде самоходных ло трубопроводу тереднего и заднего захватно-направляющих механизмов, причем ролики нижнего ложа бункера выполнены с приводом, а цепной конвейер снабжен датчиками его автоматической подачи на спуск очередной трубы на нижнее ложе бункера.
2.Машина по п. 1, отличающаяся тем, что каждый захватно-направляющий механизм линии сборки выполнен в виде размещенных по обе стороны трубопровода в под/пружиненных опорных втулках вертикально расположенных валов, на верхнем л нижнем
концах которых укреплено по фрикционному ролику, причем фрикционные ролики переднего по ходу захватно-направляющего механизма расставлены по диаметру раструба (муфты), а фрикщионные ролики заднего расставлены по диаметру трубы и имеют скорость меньшую, чем скорость первых.
3.Машина по пп. 1 и 2, отличающаяся тем, что приводы роликов нижнего ложа бункера и фрикционных роликов захватно-направляющих механизмов выполнены в виде цепных передач, кинематически связанных с ходовыми катками прицепной рамы.
4.Машина по п. 1, отличающаяся тем, что каждый датчик автоматической подачи цепного конвейера выполнен в виде катка, вертикально установленного на соответствующем захвате этого конвейера и взаимодействующего с трубой, находящейся на роликах нижнего ложа бункера.
Источники информации, принятые во внимание .при зкспертизе:
1.Патент США № 2538365, кл. 29-253, опубл. 1951.1
2.Авторское свидетельство № 327358, кл. F 16 L 1/00, 1968.

| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижной агрегат для строительства надземного трубопровода | 1990 |
|
SU1783218A1 |
| Устройство для монтажа раструбного и муфтового трубопроводов | 1976 |
|
SU681159A1 |
| Трубомонтажная машина для сооружения линии нефтепродуктопроводов | 2022 |
|
RU2791635C1 |
| Машина для монтажа трубопровода из труб с раструбами | 1981 |
|
SU1008556A1 |
| Мобильное средство для монтажа трубопроводных модулей | 2016 |
|
RU2620185C1 |
| Мобильный монтажный комплекс для сборно-разборных трубопроводов с раструбными соединениями труб | 2024 |
|
RU2841447C1 |
| Устройство для подачи листа | 1981 |
|
SU1030074A1 |
| Машина для монтажа трубопровода из труб с раструбами | 1977 |
|
SU740916A1 |
| ПОТОЧНАЯ, АВТОНОМНАЯ, МОБИЛЬНАЯ ЛИНИЯ ДЛЯ МОНТАЖА ТРУБОПРОВОДОВ | 1999 |
|
RU2164635C1 |
| РАЗБОРНЫЙ МЕХАНИЗМ ДЛЯ ВЕДЕНИЯ ДЕМОНТАЖА СБОРНО-РАЗБОРНОГО ТРУБОПРОВОДА С СОЕДИНЕНИЕМ "РАСТРУБ" | 2007 |
|
RU2337269C1 |
В- в
Sl/J.j
в-в уёели /ено
