единен с выходом блока выделения знака к вторым входом формирователя корректирующего сигнала, а выход - ico вторым входом второго сумматора, третий вход которого соединен с выходом формирователя корректирующего сигнала, а выход - со вторы м входом первого сумматора.
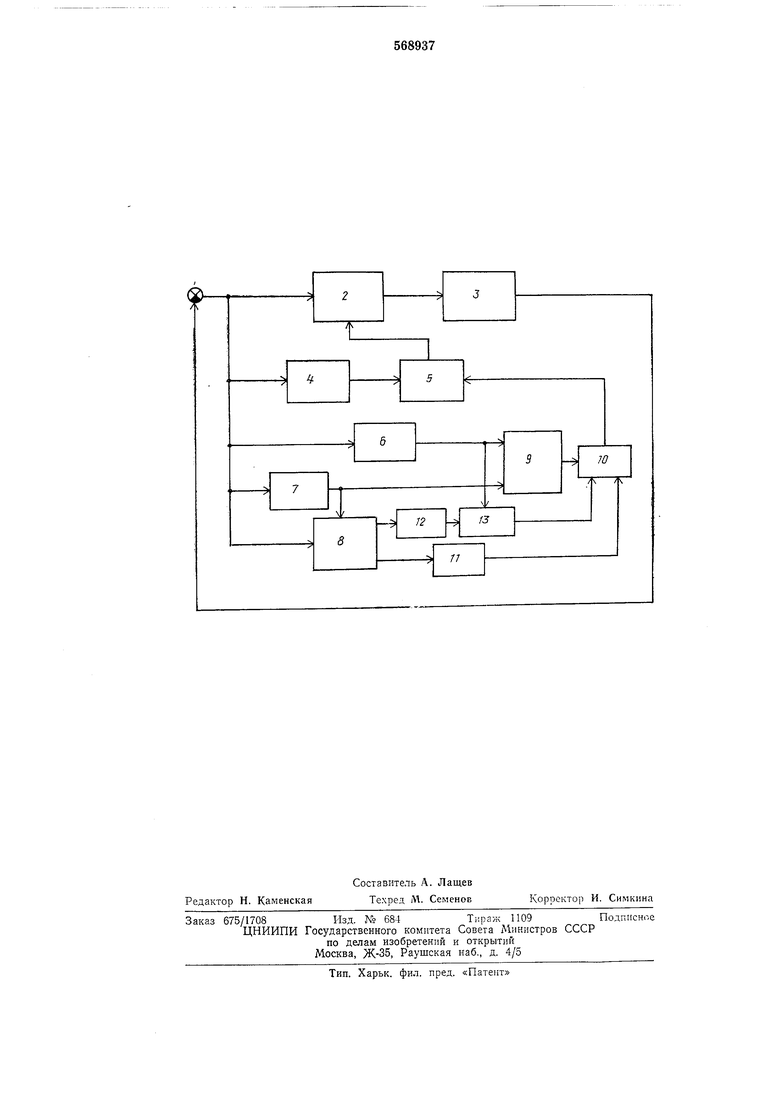
На чертеже представлена блок-схе ма предлагаемой системы.
Система содержит блок сравнения /, выход которого подключен к лервому входу блока Задания коммутируемых коэффициентов 2, а выход блока 2 - ко входу объекта регулирования 3, дифференцирующее устройство 4, соединенное выходом с первым входом первого суММатора 5, блок выделения знака 6, блок выделения модуля 7 и переключатель 8, на входы которых поступает сигнал с выхода блока сравнения I, формирователь корректирующего сигнала 9, подключенный первым входо-м к выходу блока выделения модуля 7, вторым входом - к выходу выделения знака 6, а выходом - к третьему входу второго сумматора 10, пропорциональное звено //, присоединенное входом к первому выходу переключателя 8, а зыходОМ - к первому входу второго сумматора 10, квадратор 12, подключенный входом ко второму выходу переключателя S, а выходом - к первому входу блока умножения 13, выход которого соединен со вторым входом второго сумматора 10. Выход блока выделения модуля 7 подключен ко второму входу переключателя 8, выход блока выделения знака 6 - ко второму входу блока умножеНия 13, а выход второго сумматора 10 - ко вторОМу входу первого сум.матора 5.
Система работает следующим образом.
Сигнал с выхода объекта регулирования 3 проходит блок сравнения / и поступает на первый вход блока коммутируемых коэффициентов 2, а также на входы дифференцирующего устройства 4, блока выделения знака 6, блока выделения модуля 7 и первый вход переключателя 8. Сигнал с выхода блока выделения знака 6 поступает на второй вход формирователя корректирующего сигнала 9 :-1 ,на второй вход блока умножения 13. Сигнал с выхода блока выделения модуля 7 подается на второй вход переключателя 8 и на первый вход формирователя корректирующего сигнала 9. Если значение модуля сигнала на выходе блока выделения модуля 7 не превосходит некоторой заданной величины, то переключатель 8 своим выходом подключается ко входу квадратора 12, который выходом подключен к первому входу блока умножения 13. Если сигнал на выходе блока выделения модуля 7 превосходит заданную величину, то переключатель 8 переключает свой зыход со входа квадратора 12 на вход пропорционального звена //. Одновременно с этим включается формирователь 9, реализующий Лр0|бно-рациональную функцию относительно :игнала с выхода блока выделения модуля 7.
Сигналы с выходов формирователя корректирующего сигнала 9, блока уд1ложения 13 и пропорционального звена // складываются при помощи второго сумматора 10. Первый сумматор 5 производит сложение сигналов с выходов дифференцирующего устройства 4, второго сумматора 10 и формирует сигнал переключения структуры, который подается на второй вход блока задания коммутируемых коэффициентов 2. Этот блок формирует управляющий сигнал, который поступает на вход объекта регулирования 3.
Положительный технико - эконо1мический эффект, 0|беспечивающийся новой совокупностью признаков, заключается в том, что в предлагаемой системе повышается качество перёходных процессов при наличии помех в канале переключения стрзктуры при больших начальных значениях сигнала на выходе объекта управления.
Формула изобретения
Система автоматического управления, содержащая блок сравнения, вход которого соединен с ВЫХОДОМ объекта регулирования, а выход непасредственно и через последовательно соединенные дифференцирующее устройство и первый сумматор соединен с соответствующими входами блока задания коммутируе.мых коэффициентов, выход которого соединен со входом объекта регулирования, блок выделения знака и блок выделения модуля, входы которых соединены с выходом блока сравнения, блок умножения и второй сумматор, отличающаяся тем, что, с целью улучщения качества переходных цроцессав в системе, в «ей установлены формирователь корректирующего сигнала, пропорциональное звено, квадратор и переключатель, первый вход которого соединен с выходо,М блока сравнения, второй в.ход - с выходом блока выделения модуля и первым входом формирователя корректирующего сигнала, первый выход через пропорциональное звено соединен с первым входом второго сумматора, а второй через квадратор соединен с первым входом блока умножения, второй вход которого соединен с выходом блока выделения знака и вторым входо-л формирователя корректирующего сигнала, а выход - со вторым входом второго сумматора, третий 1вход которого соединен с выходом формирователя корректирующего сигнала, а выход - со вторым входом первого сумматора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР ло 276205, кл. G 05 В 13/02, 1969.
2.Авторское свидетельство СССР jYo 332435, кл. G 05 В 13/02, 1968.
3.Авторское свидетельство СССР Л-о 378803, кл. G 05 В 13/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ПРИ НАЛИЧИИ СЛУЧАЙНЫХ ВОЗМУЩЕНИЙ | 1973 |
|
SU378803A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| Нелинейное корректирующее устройство | 1980 |
|
SU951231A1 |
| Адаптивное устройство для передачи информации | 1984 |
|
SU1244693A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Устройство для слежения за информационной дорожкой носителя оптической записи | 1985 |
|
SU1265843A1 |