Изобретение относится к телеизмерениям и может быть использовано в автоматизированных системах контроля состояния окружаюп(ей среды,
Цель изобретения - повьшенне дос- товарности передачи информации путем использования адаптивного алгоритма выбора степени полинома аппроксимации,
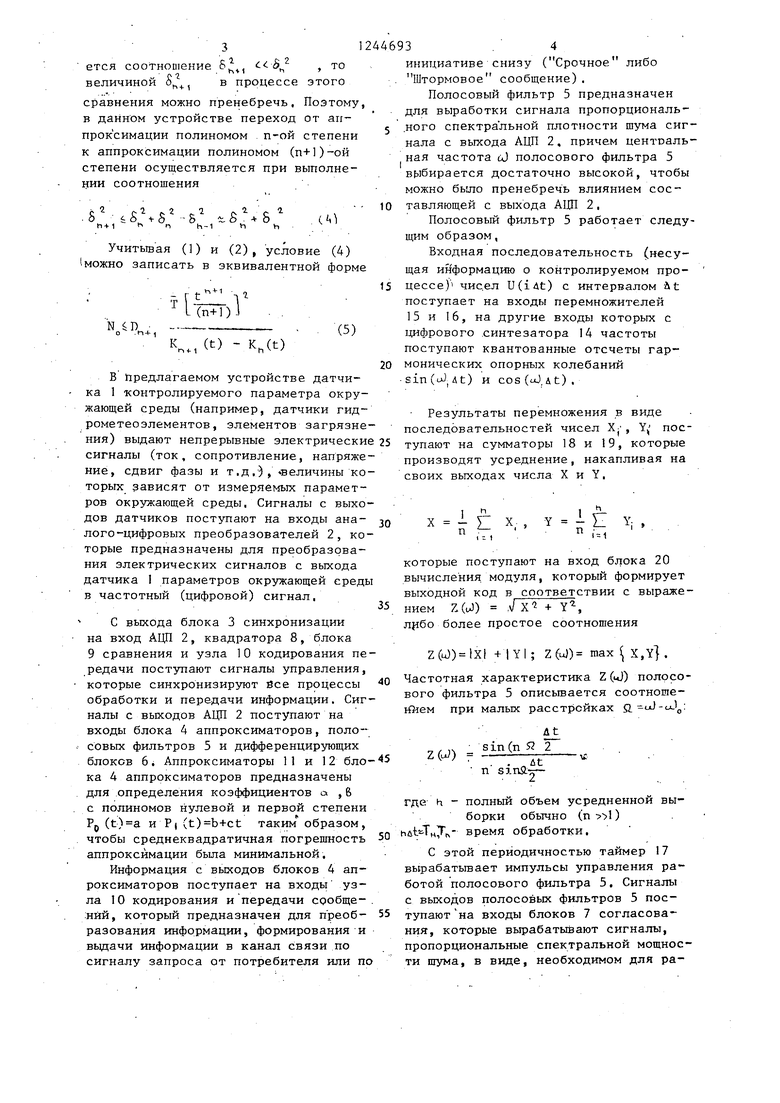
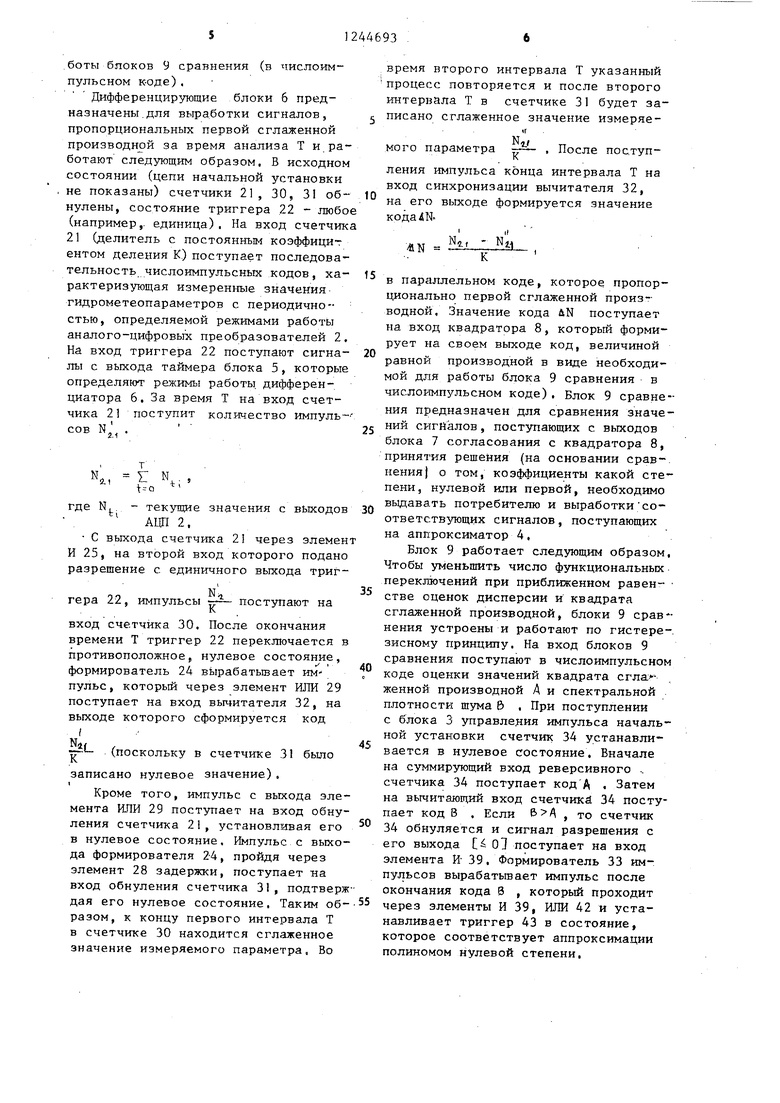
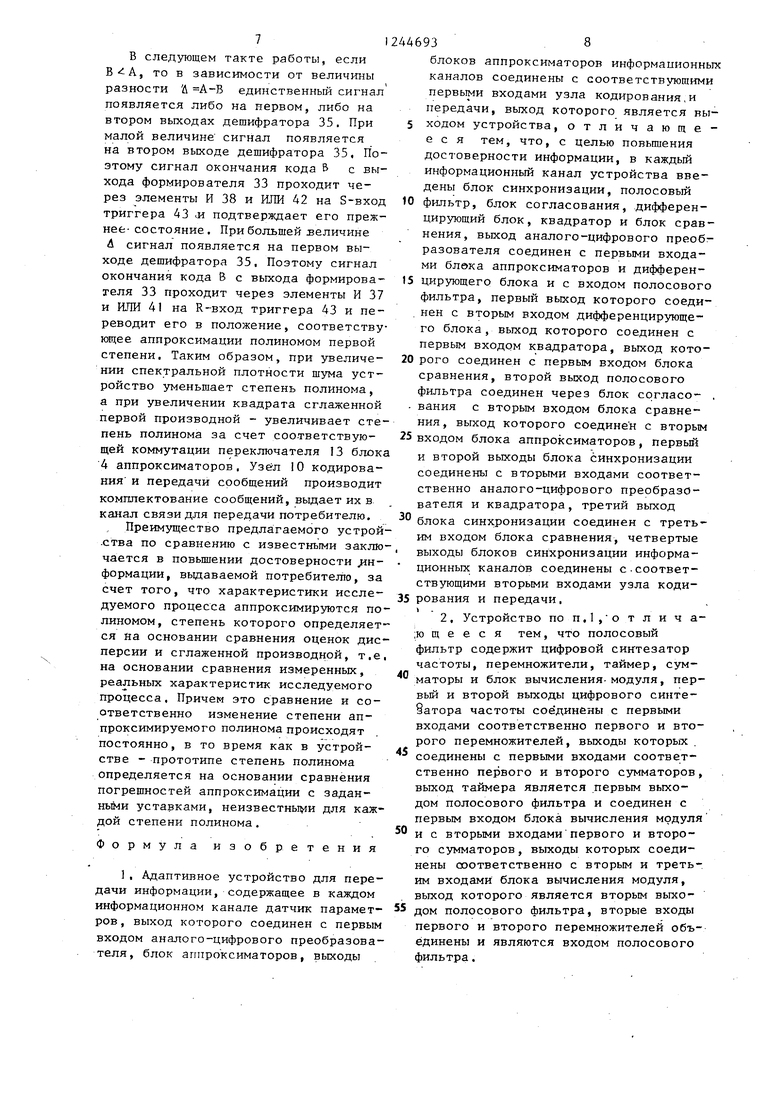
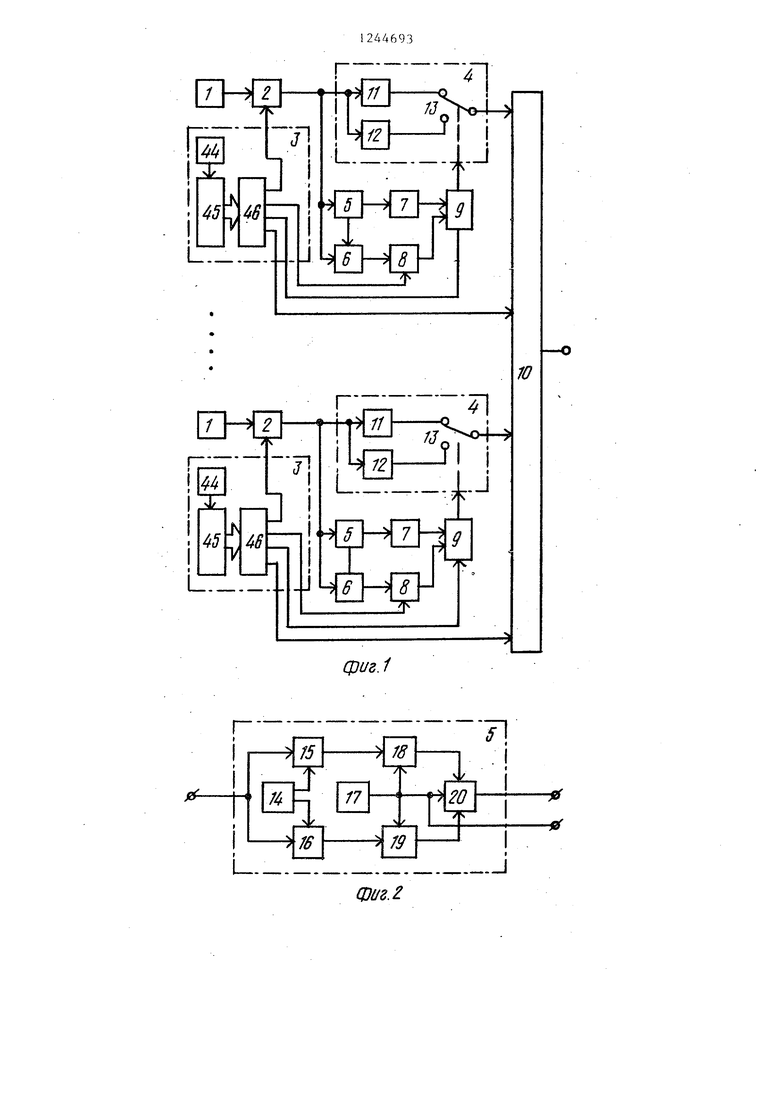
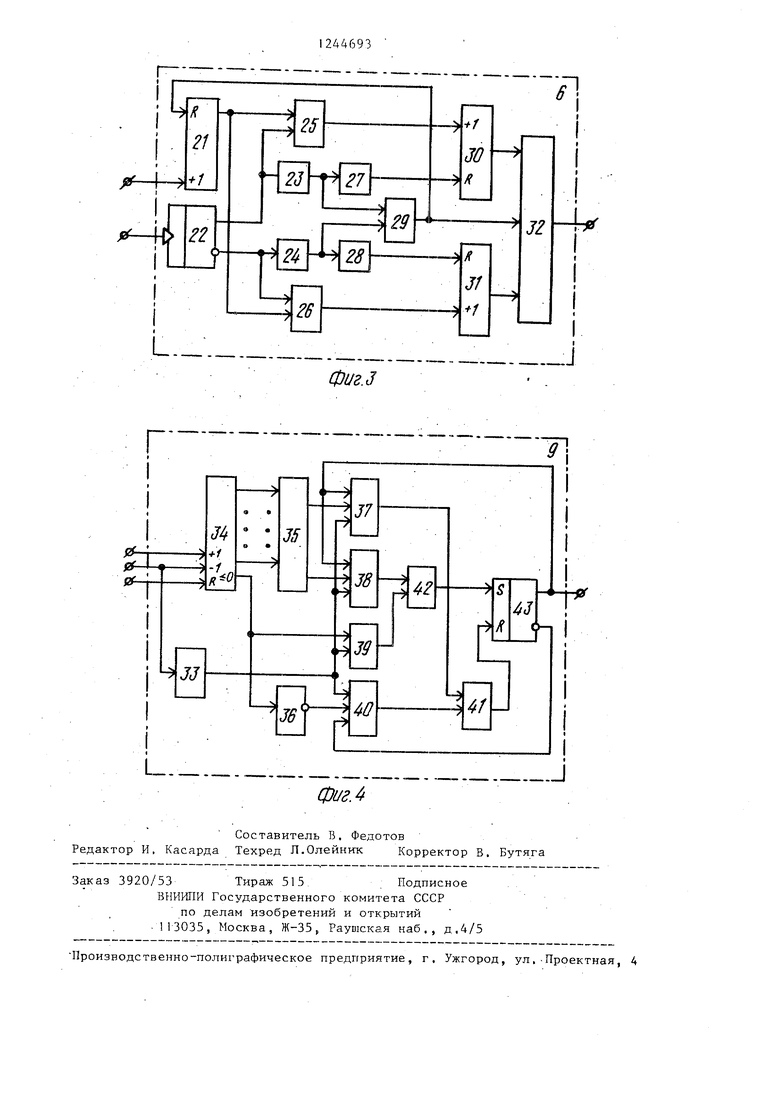
На фиг,1 изображена функциональная схема устройства; на фиг.2 - функциональная схема полосового фильтра; на фиг.З - функциональная схема дифференцирующего блока; на фиг.4 - функциональная схема блока сравнения,
Устройство состоит из h -каналов, каждый из которых содержит датчик 1 параметра Окружающей среды, анало1 о- цифровой преобразователь (А1Щ) 2, .блок 3 синхронизации, блок 4 аппрок- симаторов , полосовый фильтр 5, дифференцирующий блок 6, блок 7 согласо
вания, квадратор 8, блок 9 сравнения, узел О кодирования и передачи,
Блоки 4 аппроксиматоров (фиг,I) содержит аппроксиматор 1 полиномом нулевой степени, аппроксиматор 2 полиномом первой степени и переклю- чатель 13.
Полосовые фильтры 5 (фиг.2) содержат цифровой синтезатор 14 частоты (liJ) перемножители 15 и 16, таймер 17, сумматоры 18 и 19, блок 20 вычисления модуля. Дифференцирующие блоки б (фиг,3) содержат счетчик 21, триггер 22, фор- мирователь 23 и 24 импульсов, элементы И 25 и 26, элементы 27 и 28 за-- : держки, элементы ИЛИ 29, счетчики 30 и 31, вычитатель 32,
Блоки 9 сравнения (фиг.4) содержат формирователь 33 импульсов, реверсив.ный счетчик 34, дешифратор 35, инвертор 36, первый 37, второй 38, третий 39 и четвертый 40 элементы И, первый 41 и второй,42 элементы ИЛИ, триггер 43 ,
Блоки 3 синхронизации (фиг.1) содер .жат генератор 44 импульсов, счетчик 45 и дешифратор 46.
Устройство работает следующим образом.
Из работ, рассматривающих алгоритмы фильтрации результатов наблюдений реализующие аппроксиматтию выделяемой 1шформативной составляющей с помощью полиномов (полиноминальное сглаживание) , следует, что дисперсия результатов фильтрации входного сигнала на
интервале времени (О, Т) имеет вид:
N,
,(t)
(1)
где Т - длительность интервала наблюдения процесса;
N - спектральная плотность белого шума, искажающего информативную составляющую; Кц(1:)- коэффициент пропорциональности, определяемый степенью полинома и зависящий от момента времени t для которого в результате фильтрации оценивается значение информативной составляющей, Например, если результаты фильтрации используются для оценки значения информативной составляющей результата наблюдений к концу интервала обработки, т,е, , то Ко(Т) 1; К, (Т)4; К4(Т)9.
0
5
Другим источником погрешности фильтрации результатов наблюдения путем аппроксимации полиномом п-ой степени является сглаживание более быстрых изменений информативной составляющей, обусловленных отличием от нуля (п+1)-ой-производной вьщеляемой составляющей. Среднее значение квадрата возникающей при этом погрешности можно оценить величиной
h+1
§:
о„
t
(п+1)
(2)
где D
h+ (
- среднее значение квадрата (.п+1)-ой производной информативной составляющей.
С учетом (I) и (2) среднее знача-- ние квадрата полной погрешности имеет вид
г ,2 р. г й.Ь iS
(.Ъ
45
Поскольку ( увеличивается с ростом ь , а 5 уменьшается, существует оптимальное значение степени полинома, при котором квадрат пЬлной погрешности минимален,.
50 Поскольку при обработке результатов метеорологических наблюдений ха- рактерист:ики шума и информативной составляющей априорно не известны, оптимизация фильтра в данном устрой55 стве осуществляется адаптивным путем этом, так как при переходе к полиному более высокой степени в процессе сравнения Л. и U.
выполняется соотношение Б «07
И ь,
ТО
величиной 6 в процессе этого
сравнения можно пренебречь, Поэтому в данном устройстве переход от аппроксимации полиномом п-ой степени к аппроксимации полиномом (п+1)-ой степени осуществляется при выполнении соотношения
. -5 -.S -S (М
П4 1 1 П h-1 И h
Учитьшая (1) и (2), условие (4) (можно записать в эквивалентной форм
г д- 1
т - 1 L (п+1)
К,,, (t) - K,(t)
(5)
В 11редлагаемом устройстве датчика 1 контролируемого параметра окружающей среды (например, датчики гид- рометеоэлементов, элементов загрязнения) вьщают непрерывные электрические сигналы (ток, сопротивление, напряжение, сдвиг фазы и т.д.) , величины которых зависят от измеряемых параметров окружающей среды. Сигналы с выходов датчиков поступают на входы ана- лого-цифровых преобразователей 2, которые предназначены для преобразования электрических сигналов с выхода датчика I параметров окружающей среды
в частотный (цифровой) сигнал.
с выхода блока 3 синхронизации на вход АЦП 2, квадратора 8, блока 9 сравнения и узла 10 кодирования передачи поступают сигналы управления, которые синхронизируют See процессы обработки и передачи информации. Сигналы с выходов АЦП 2 поступают на входы блока 4 аппроксиматоров, полосовых фильтров 5 и дифференцирующих блоков 6i Аппроксиматоры 11 и 12 блока 4 аппроксиматоров предназначены для определения коэффициентов о ,6 с полиномов нулевой и первой степени Рр (t)a и Р) (t)b+ct таким образом, чтобы среднеквадратичная погрешность аппроксимации была минимальной.
Информация с выходов блоков 4 ап- роксиматоров поступает на входы узла 10 кодирования и передачи сробще:нйй, который предназначен для преоб- разования информации, формирования и выдачи информации в канал связи по сигналу запроса от потребителя или по
инициативе снизу (Срочное либо . Штормовое сообщение) ,
Полосовый фильтр 5 предназначен для выработки сигнала пропорциональ- .ного спектральной плотности шума сигнала с выхода АЦП 2. причем центральная частота и) полосового фильтра 5 выбирается достаточно высокой, чтобы можно было пренебречь влиянием составляющей с выхода АЦП 2.
Полосовый фильтр 5 работает следу- щим образом,
Входная последовательность (несущая информацию о контролируемом процессе) чисел U(i4t) с интервалом At поступает на входы перемножителей 15 и 16, на другие входы которых с цифрового .синтезатора 14 частоты поступают квантованные отсчеты гар- моническргх опорных колебаний
-sin() и COS(uJ,At).
Результаты перемножения в виде последовательностей чисел Xj , поступают на сумматоры 18 и 19, которые производят усреднение, накапливая на своих выходах числа X и Y.
I
i Ц
п - 1:1
1
iS
которые поступают на вход блока 20 вычисления, модуля, который формирует выходной код в соответствии с выражением Z(uJ) ,/ Х 2 + Y, лрбо более простое соотношения
Z(u))lXl + I YI ; Z(u)) max i, X,Y.
Частотная характеристика Z (tj) полосового фильтра 5 описьшается соотноше- lOieM при малых расстройках Q.
Д
V/ )Ч S in (и Я 2 Z(u) ,.
п sxnSiyгде h - полный объем усредненной выборки обычно (п 1) hut-TH f,- время обработки.
С этой периодичностью таймер 17 вырабатьтает импульсы управления работой полосового фильтра 5. Сигналы с выходов полосовых фильтров 5 поступают на входы блоков 7 согласования, которые вырабатывают сигналы, пропорциональные спектральной мощности шума, в виде, необходимом для ра.боты блоков 9 сравнения (в числоим- пульсном к-оде) ,
Дифференцирующие блоки 6 предназначены .для выработки сигналов, пропорциональных первой сглаженной производной за время анализа Т и работают следующим образом, Б исходном состоянии (цепи начальной установки не показаны) счетчики 21, 30, 3 об- нулены, состояние триггера 22 - любо (например,, единица). На вход счетчик 21 (делитель с постоянным коэффицит ентом деления К) поступает последовательность числоимпульсних кодов, ха- рактеризующая измеренные значения- гидрометеопараметров с периодично- стью, определяемой режимами работы аналого-цифровых преобразователей 2. На вход триггера 22 поступают сигна- лы с выхода таймера блока 5, которые определянуг режимы работы, дифференциатора 6, За время Т на вход счетчика 21 поступит количество импуль- сов N,V .
N,, 1: N ,
t Q
де N,. - текущие значения с выходов 30 . АЦП 2.
С выхода счетчика 21 через элемент 25, на второй вход которого подано азрешение с единичного выхода триг35
поступают на
ера 22, импульсы
40
45
К
вход счетчика 30, После окончания времени Т триггер 22 перекЛ1очается в противоположное, нулевое состояние, формирователь 24 вьфабатьшает им пульс, который через элемент ИЛИ 29 поступает на вход вычитателя 32, на выходе которого сформируется код /
тр- (поскольку в счетчике 3 было к
записано нулевое значение),
I
Кроме того, импульс с выхода элемента ИЛИ 29 поступает на вход обнуления счетчика 21, установливая его в нулевое состояние. Импульс с выхода формирователя 24, пройдя через элемент 28 задержки, поступает на вход обнуления счетчика 31, подтверждая его нулевое состояние. Таким об- разом, к концу первого интервала Т в счетчике 30 находится сглаженное значение измеряемого параметра. Во
время второго интервала Т указанный процесс повторяется и после второго интернала Т в счетчике 31 будет записано сглаженное значение измеряемого параметра
Nty К
, После поступления импульса конца интервала Т на вход синхронизации вычитателя 32, на его выходе формируется значение кода4№
N
«.)
- i
К
, 0 5 0
5
0
5
0
5
в параллельном коде, которое пропорционально первой сглаженной производной, Значение кода ДЫ поступает на вход квадратора 8, который формирует на своем выходе код, величиной равной производной в виде необходимой для работы блока 9 сравнения в чис.ло1 смпульсном коде) , Блок 9 сравнения предназначен для сравнения значений сигйалов, поступающих с выходов блока 7 согласования с квадратора 8, принятия решения (на основании сравнения) о том, коэффициенты какой степени, нулевой или первой, необходимо выдавать потребителю и выработки со- ответствзтощих сигналов, поступающих на аппроксиматор 4,
Блок 9 работает следующим образом. Чтобы уменьшить число функциональных переключений при приближенном равен- стве оценок дисперсии и квадрата сглаженной производной, блоки 9 нения устроены и работают по гистере- зисному принципу. На вход блоков 9 сравнения поступают в числоимпульсном коде оценки значений квадрата женной производной А и спектральной плотности шума & , При поступлении с блока 3 управления импульса начальной устангавки счетчик 34 устанавливается в нулевое состояние. Вначале на суммирующий вход реверсивного .. счетчика 34 поступает код А . Затем на вьгчитадащий вход счетчики 34 поступает код В , Если & А , то счетчик 34 обнуляется и сигнал разрешения с его выхода t ОЗ поступает на вход элемента И- 39, Формирователь 33 импульсов вырабатьшает импульс после окончания кода В , который проходит через элементы И 39, ИЛИ 42 и устанавливает триггер 43 в состояние, которое соответствует аппроксимации полиномом нулевой степени.
В следующем такте работы, если , то в зависимости от величины разности и А-В единственный сигнал появляется либо на первом, либо на втором выходах дешифратора 35, При малой величине сигнал появляется на втором выходе дешифратора 35, Поэтому сигнал окончания кода & с выхода формирователя 33 проходит через элементы И 38 и ИЛИ 42 на S-вход триггера 43 м подтверждает его прежнее- состояние. При большей величине & сигнал появляется на первом выходе дешифратора 35, Поэтому сигнал окончания кода В с выхода формирователя 33 проходит через элементы И 37 и ИЛИ 41 на R-вход триггера 43 и переводит его в положение, соответствующее аппроксимации полиномом первой степени. Таким образом, при увеличении спектральной плотности шума устройство уменьшает степень полинома, а при увеличении квадрата сглаженной первой производной - увеличивает степень полинома за счет соответствующей коммутации переключателя 13 блока 4 аппроксиматоров, Узел 10 кодирования и передачи сообщений производит комплектование сообщений, выдает их в канал связи для передачи потребителю.
Преимущество предла гаемого устрой .ства по сравнению с известными заключается в повьшгении достоверности н- формации, вьщаваемой потребителю, за счет того, что характеристики исследуемого процесса аппроксимируются полиномом, степень которого определяется на основании сравнения оценок дисперсии и сглаженной производной, т,е на основании сравнения измеренных, реальных характеристик исследуемого процесса. Причем это сравнение и соответственно изменение степени аппроксимируемого полинома происходят постоянно, в то время как в устройстве - прототипе степень полинома определяется на основании сравнения погрешностей аппроксимации с задан- ньми уставками, неизвестны 1и для каждой степени полинома.
Формула изобретения
1, Адаптивное устройство для передачи информации, содержащее в каждом информационном канале датчик параметров , выход которого соединен с первым входом аналого-цифрового преобразователя, блок аппроксиматоров, выходы
блоков аппроксиматоров информационны каналов соединены с соответствующими первыми входами узла кодирования,и передачи, выход которого является вы5 ходом устройства, отличающееся тем, что, с целью повьш1ения достоверности информации, в каждый информационный канал устройства введены блок синхронизации, полосовый
10 фильтр, блок согласования, дифференцирующий блок, квадратор и блок сравнения, выход аналого-цифрового преобразователя соединен с первыми входами блока аппроксиматоров и дифферен15 цирующего блока и с входом полосового фильтра, первый выход которого соеди- , нен с вторым входом дифференцирующего блока, выход которого соединен с первым входом квадратора, выход кото20 рого соединен с первым входом блока сравнения, второй выход полосового фильтра соединен через блок согласо- вания с вторьм входом блока сравнения, выход которого соединен с вторым
25 входом блока аппроксиматоров, первьш и второй выходы блока синхронизации соединены с вторыми входами соответственно аналого-цифрового преобразователя и квадратора, третий выход
блока синхронизации соединен с третьим входом блока сравнения, четвертые
выходы блоков синхронизации информационных каналов соединены с.соответствующими вторыми входами узла коди35 рования и передачи,
2, Устройство по п,1, о т л и ч а- ;ю щ е е с я тем, что полосовый фильтр содержит цифровой синтезатор частоты, перемножители, таймер, сум маторы и блок вычисления-модуля, пер- вьй и второй выходы цифрового синте- §атора частоты соединены с первыми входами соответственно первого и второго перемножителей, выходы которых .
соединены с первыми входами соответственно первого и второго сумматоров, выход таймера является первым выходом полосового фильтра и соединен с первым входом блока вычисления модуля
50 и с вторыми входами первого и второго сумматоров, выходы которых соединены соответственно с вторым и третьим входами блока вычисления модуля, выход которого является вторым выхо55 дом полосового фильтра, вторые входы первого и второго перемножителей объединены и являются входом полосового фильтра.
9124А693
Зо Устройство по п,15 о т л и ч а- ю щ е е с я , что. дифференцирующий блок содержит счетчики, триггер.
15 т 20 И 25 р 30
элементы И элемент ИЛИ, элементы задержки, формирователи импульсов и вы- читатель 5 выход первого счетчик а соединен с первьпчи входами первого и второго элементов И, выходы которых соединены со счетными входами соответственно второго и третьего счетчиков j выходы которых соедине1 Ь соответственно с первым, и вторым сигнальными входами вычитателя5 прямой вьжод триггера - непосредственно с вторым входом первого элемента И и через первый формирователь импульсов- с входом первого элемента задержки и с первым входом элемента ИЛИ, инверсный вьтход триггера соединен непосредственно с вторым входом второго элемента И и через второй формирователь импульсов с входом второго элемента задержки и с вторым входом элемента II, выход которого соединен с входом установки нуля первого счетчика и с входом синхронизации вычитателя J выход которого является выходо дифференцируюи е.го блока, выходы первого к второго элементов задержки соединены с входами установки нуля соответственно второго и третьего счетчиков, входы первого счетчика и триггера являются соответственно первым и вторым входами дифференци- p;,Toiii;ero блока ,
10 4. Устройство по п.
отличающееся тем, что блок срав
нения содержит счетчик, дешифратор, элементы И, элементы ИЛИ, триггер, инвертор и формирователь импульсов, информационные выходы счетчика соединены с, соответствующими входами дешифратора,- первый и второй выходы которого соединены с первыми входами соответственно первого и второго элементов И, зыход обнуления счетчика соединен непосредственно с первым входом третьего элемента И и через инвертор - с первым входом че звер- 5 того элемента И, выход формирователя импульсов соединен с объединенными вторыми входами элементов И, выходы первого и четвертого элементов И сое динены с входами первого элемента 0 ИЛИ, выходы второго и третьего элементов И - с входами второго элемента ИЛИ, выход первого и второго элементов ИЛИ - соответственно с входами установки нуля и единицы тригге- 5 ра, прямой выход которого является выходом блока сравнения и соединен с третьими входами первого и второго элементов И, инверсный выход триггера соединен с третьим входом четвертого 0 элемента И, суммирующий вход и вход обнуления счетчика являются соответственно первым и третьим, входами блока сравнения, вход формирователя и вычитающий вход счетчика объединены и являются вторым входом блока сравнения
фиг.1
...I
Фиг.
L...:..
Фиг.З
L...
.,....I
фиг.
Составитель В, Федотов Редактор И, Касарда Техред Л.Олейнкк Корректор В, Бутяга
Заказ 3920/53 Тираж 515. , Подписное ВНИИ11И Государственного комитета СССР
по делам изобретений и открытий .113035, Москва, Ж-35, Раушская наб . , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.-Проектная, 4
I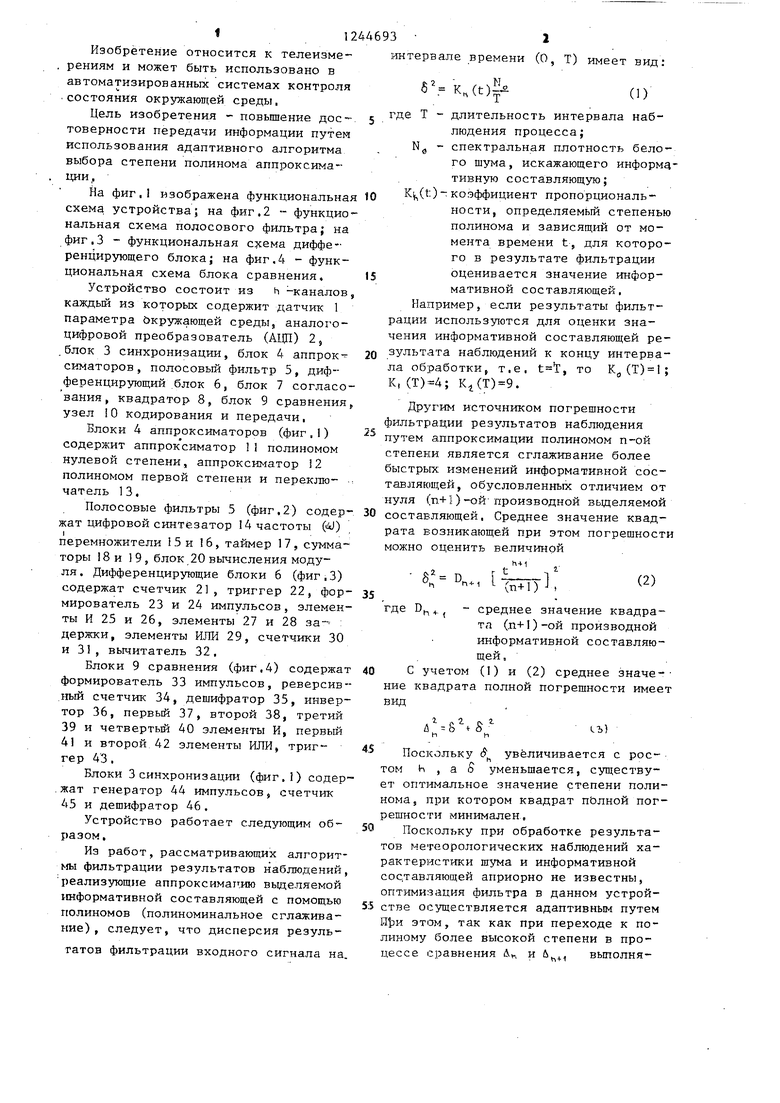
| название | год | авторы | номер документа |
|---|---|---|---|
| Кусочно-квадратичный аппроксиматор | 1984 |
|
SU1288725A1 |
| Измерительная информационная система контроля состояния окружающей среды | 1981 |
|
SU959130A1 |
| Устройство для воспроизведения функций | 1984 |
|
SU1182539A1 |
| Устройство для сжатия информации | 1986 |
|
SU1324047A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| УСТРОЙСТВО для КУСОЧНО-КВАДРАТИЧНОЙ АППРОКСИМАЦИИ ФУНКЦИЙiS^,fi-\?-t "JP'ltpT^^ФУ-ЗД и ;i,'';^r «^'.) | 1973 |
|
SU408329A1 |
| АППРОКСИМАТОР МОНОТОННЫХ ФУНКЦИЙ | 1991 |
|
RU2023297C1 |
| Устройство для передачи многочастотных сигналов | 1989 |
|
SU1700760A1 |
| УСТРОЙСТВО ДЛЯ АППРОКСИМАЦИИ ФУНКЦИЙ, ЗАДАННЫХ ЦИФРОВЫМ КОДОМ | 1971 |
|
SU427346A1 |
| Устройство для определения отношения сигнал-шум сигналов с фазовой модуляцией | 1986 |
|
SU1374154A2 |
Изобретение относится к телеизмерениям и может использоваться в автоматизированных системах контроля состояния окружающей среды. Целью изобретения является повышение досто- вер ности передачи информации. Устрой-, ство состоит из узла кодирования и передачи и п-информационных каналов, каждый из которых содержит датчик . параметра окружающей среды, аналого- Д1 фровой преобразователь, блок синхронизации, блок аппроксиматоров, полосовый фильтр, дифференцирующий блок, блок согласования, квадратор и блок сравнения. Блоки аппроксиматоров содержат аппроксиматор полиномом нулевой степени, аппроксиматор полиномом первой степени и переключатель . Полосовые фильтры содержат цифровой синтезатор частоты, перемножи - тели,таймер сумматоры и блок вычиС ления модуля. Дифференцирующие блоки содержат счетчик, триггер, формиро- ,ватели импульсов, элементы И, элемен ты задержки, элементы ИЛИ, счетчикц. и .вычитатель, Блоки сравнения содер- жат. формирователь импульсов, ревер-- сивный счетчик , дешифратор , инвер - - тор, элементы И, элементы ИЛИ и триггер. Блоки синхронизации содержат генератор импульсов, счетчик и де - . Предлагаемое устройство обеспечивает повьшение достоверности информации, выдаваемой потребителю за счет того, что характеристики исследуемого процесса аппроксимируются полиномом, степень которого определяется на основании сравнения оценок дисперсии и сглаженной производной, т.е. на основании сравнения измеренных, реальных характеристик ис- следуемого процесса. 3. з.п. ф-лы, 4 ил. с 9 (Л
| Романенко А.Ф., Сергеев Г.А | |||
| Вопросы прикладного анализа случайных процессов | |||
| М.: Советское Радио, 1968, с.73-78 | |||
| Виленкин С.Я | |||
| Статистическая обработка результатов исследования случайных функций, М.: Энергия, 1979, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Устройство для передачи телеметрической информации | 1977 |
|
SU660078A2 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
