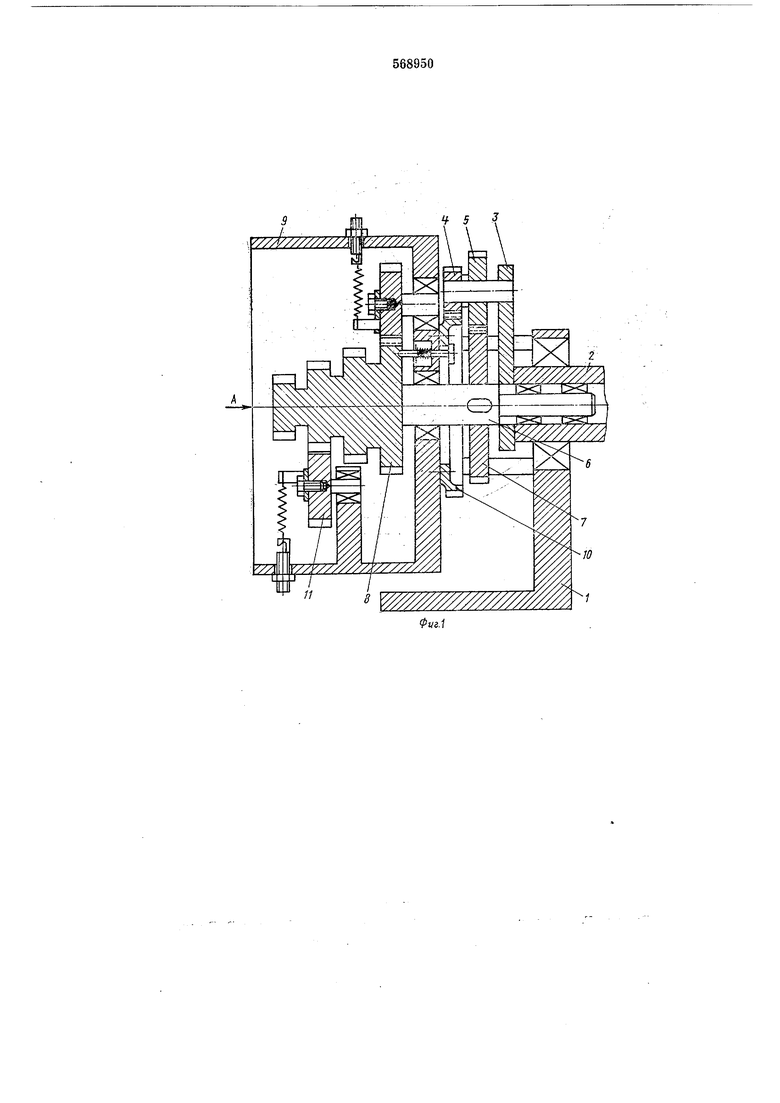
установлены входной приводйой вал 2 сводилом k ;и жесико соедн,нен«ьши между собой шестернями-сателлитами 4 я 5, а также вал 6 задающих перемещений с шестерней 7 и укренлен(НЫ)м яа его торце блоком 8 интегральных шестерен. На валу .задающих перемещений смонтирован на подшипниках поворотный стакан 9, охватывающий блок 8 интегральных шестерен, с шестерней 10 на торцовой поверхности. Одна ,из 1Шбсте рен-сателлитов 4 находится в зацеплении с шестерн-ей ./(3, а другая 5 - с шестерней 7. Внутри поворотного стакала 9 на стойках укреплены вращательно подвижные шестерни 11, лопарно зацепляемые с отдельньгми шестернями блока
8и обеспечивающие передаточные отношения, равные числа,м натурального ряда 1, 2, 3 ..., соответствующим порядковым номерам солрягаемцх зубчатых naip. .
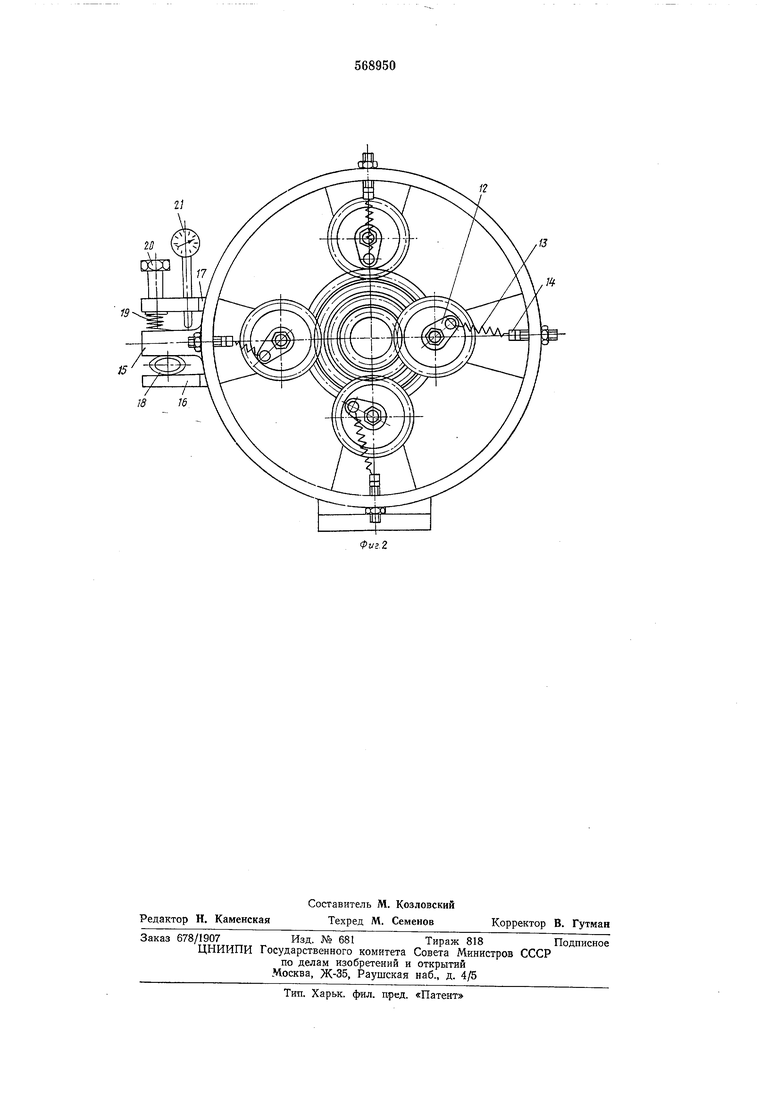
На торцах шестерен // укреплены регулируемые в круговом налр-авлелии крлвошипы 12, которые лосредством тарированных аружин 13 соединены с регулируемыми винтами 14, симметрично расположенными на цилиндричеокой, -ловерхности стакана 9. На наружной noBepxiHocTH поворотного -стакана
9выполнен выступ 15, .который расположен между выступами 16 и 17 .стойки 1. Между выступом 16 стойки и выступом 15 стакана помещен упругий чувствительный элемент 18 датчика силы, а на выступе 17 стойки укреилены пружина 19 с прижимным винтом 20 и датчик неремещеинй 21.
Функциональный преобразователь перемещений работает следующим образом.
Вращательное движение от входного приводного вал-а 2 -С; водилом 3 сообщается через зубчатое зацепление ще|Стернл-сателлита
5и шестерни 7 валу задающих перемещений
6с блоком 8 интегральных шестерен, а далее шестерням //. Величины угловых перемещений и скоростей шестерен 11 в лорядке возрастания их, номеров от первого до «-ого представляют возрастающую арифметическую прогрессию, в которой ее разность равна мервому члену. Каждая из вращающиХ|Ся шестерен 11 посредством жривошипа 12 осуществляет твриодическое деформированяе тарированной пружины 13 и передачу на иоворотный ста.кан 9 :Крутящего момента, функцион-ально зависящего от угла ее поворота и изменяющегося по закону, близкому к гармоническому. Результирующий момент, воспринимаемый noBOjpOTHbiM стаканом 9 -со стороны тарированных лружин 13, представляет собой периодическую функцию с периодом, кратным периодам составляющих функций /крутящих моментов. Действующий на пово)ротный стакан 9 со стороны вала задающих перемещений 6 крутящий момент уравловешивается солротивлбнием деформируемого чувствительного элемента S8 датчика силы, а угловое смещение .поворотного ста,кан.а регистрируется датчиком перемещений 21.
При этом перемещение поворотного стакана 9 не -влияет на- зависимость между перемещениями входного лриводного вала 2 и шестерен 11. Для воспроизведения необходимой наперед заданной периодической функци-анальной зависимости между углом поворота входного приводного в.ала 2, с -оди-ой сстораны, и усилием, воспринимаемым чувствительным элементОхМ 18 датчика силы, либо перемещения-миповоротного стакана 9, регистрируемыми датчиком ле(ремещений 21, с .другой стороны, определяют расчетным лутем необходимые величины ма,коимальных значений и сдвиг по фазе функций крутящих моментов, генерируемых каждой шестерней 7/, -а затем
посредством регулирования, лредварительного
натяжения пружин 13 и угловых смещений
криво1шилов 12 достигают поставленной цели.
Период генерируемой функции усилия,
восприлимаемото чувствительным элементом
да-ТЧика силы, .либо п-еремещений, регистри. .руемых датчиком перемещений, является равным лериоду вращения шестерни 7/ с наименьшей угловой скоростью.. .
Формула из о б р е т е-ни я
25
Функциональный лр-еобразователь ларемещений, содержащий стойку, в которой соосно укреплены входной приводной вал iC водилом и двумя шесте энйми-аателлитами, вал задающих перемещений с шестерней, сопряженной с одной из -шестарен-сателлитов входного врив-одного в-ала, поворотный стакан с шестерней на торцовой поверхности, которая сопряжена с другой щастарней-сателлитом вхо.дного приводного -вала, упругий чув-ствительный элемент датчика силы, пружину с лрижимным винтом и датчик леремещений, о т. л и ч а ю щ .-и и с я тем, что, с целью повышения точности и быстродействия шреобразОвателя, -он содержит блок интегральных -шесте, рен, -который уиреплен на торце вала задающих пер-емещений, и сопряжевные с ним шестерни, которые установлены на стойках внутри поворотного -стакана и со-единены с симметрИчно расположенными на его ловерхности регулируемыми винтами посредством кривошипов и тарированных пружин, пружина с п|рижим-ным винтом и датчик леремещеиий
50 укреплены на одном из выступов стойки и солряжены с поверхн-астью р-адиального выстула на поворотном стакане, между второй новерхзностью котор-ого и другим выступом стойки установлен упругий чувств.-ительный
5 элемент датчика силы.
Источн.иК1и информации, -принятые в-о вяималие при э-кспертизе:
1. А. .Н. Малов, Ю. В. Иванов. Основы ав. 60 томатики 1И автоматизаци я лроизводственных процеооов, М., «МашИН-остроение, -1974, с. 35- 50.
i2. Справочник «Вычислительная тех:ника под ред. Г. Хаски и Г. Корна, iM.-Л., -«Энер65 гия, 1964.
5
.
21
12
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки резьбовых соединений с зажатым осевым усилием затяжки | 1974 |
|
SU564144A1 |
| Устройство для сборки резьбовых соединений | 1982 |
|
SU1147553A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| АНДРОГИННЫЙ ПЕРИФЕРИЙНЫЙ АГРЕГАТ СТЫКОВКИ (АПАС) И ДЕМПФЕР АМОРТИЗАЦИОННО- ПРИВОДНОЙ СИСТЕМЫ ДЛЯ НЕГО | 1998 |
|
RU2131829C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| РЕДУКТОР ПОВОРОТНОГО МЕХАНИЗМА КРАНА | 1992 |
|
RU2043551C1 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2499933C2 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ КОРОБКИ ПЕРЕДАЧ | 2002 |
|
RU2269043C2 |