Если взять весы с коромыслом, положить на одну чашку, например, 10 килограммов какого-либо груза, а на другую 10 килограммов гирь, то ничтожным усилием возможно подымать и опускать эти грузы на некоторую высоту, как, например, 30 мм, так как они взаимно уравновешиваются; подем одного происходит за счет опускания другого на протяжении всех 30 мм, так как ни вес гирь, ни вес груза, на всем этом расстоянии, не изменяется в практически заметных пределах. Механическая работа, необходимая для подема одного груза, получается при опускании другого и поэтому, для некоторого вертикального передвижения их, нужно затрачивать только ту механическую работу, которая необходима для преодолевания различных сопротивлений весов. Совершенно иная картина получится, однако, если вместо груза будет привязан кусок железа, расположенный над полюсом магнита на расстоянии тех же 30 мм, при желании уравновесить его грузом определенного веса. Известно, что
сила магнитного притяжения изменяется обратно пропорционально квадратам расстояний, и если мысленно расстояние в 30 мм будет разделено на целый ряд точек, то во всякой такой точке сила притяжения куска железа магнитом будет иная, как если бы вес этого куска железа был величиной переменной. По отношению к грузу, лежащему на другой чашке весов, его можно рассматривать как груз, вес которого не постоянен и то увеличивается, то уменьшается, в зависимости от приближения или удаления от полюса магнита. Можно, конечно, уравновесить силу притяжения этого куска железа, в какойнибудь определенной точке, какимто грузом, таким образом, что для удерживания его в данном положении потребуется тоже очень небольшое усилие-это частный случай. Предлагаемое устройство имеет целью уравновешивать это переменное притяжение грузом постоянного веса, т.-е. дать возможность приближать и удалять железный якорь к полюсам магнита или сдвитать и раздвигать разноименные полюсы магнитов, с затратой лишь той небольшой механической работы, которая поглощается трением частей прибора и его отклонениями от теоретически верного образца.
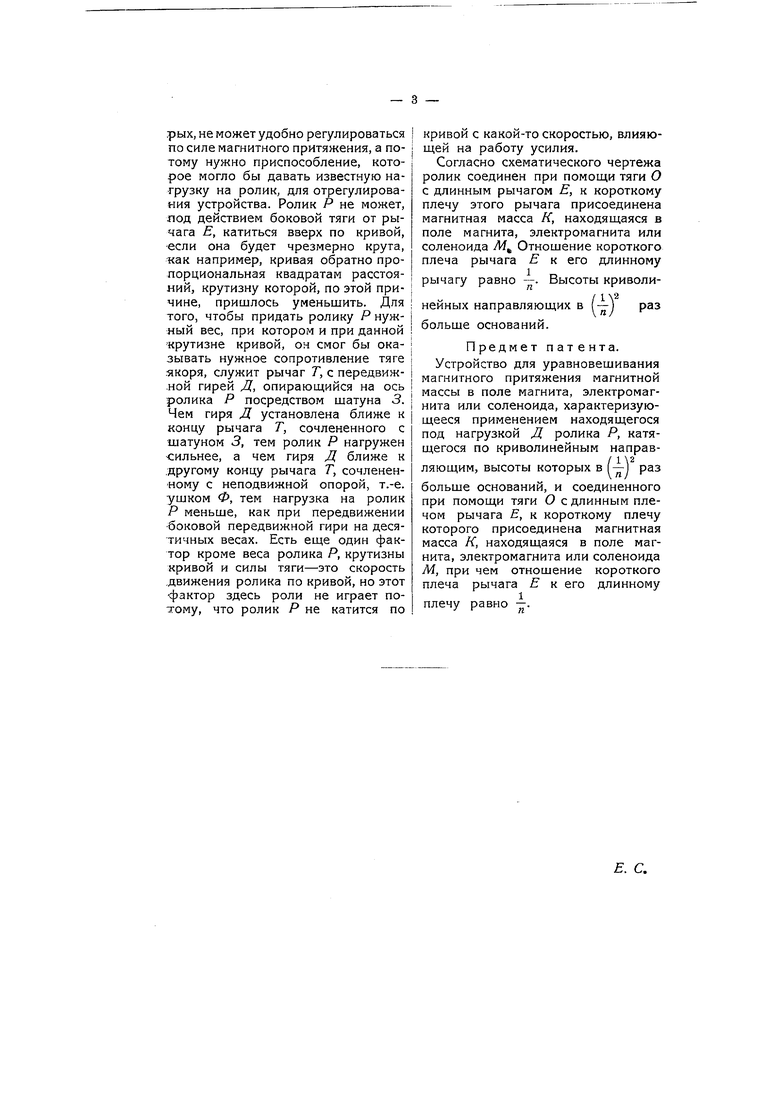
На схематическом чертеже изображено предлагаемое устройство.
Если построить графически кривую, обратно пропорциональную квадратам расстояний, то она вскоре переходит в почти вертикальную линию и для практических применений неудобна. Поэтому в предлагаемом устройстве применяется кривая, у которой шаг основания взят в сантиметрах, а высоты в милли.метрах, в квадрате. Кривая строится следующим образом: прямая линия АВ делится на 10 равных частей, например, сантиметров; из всех этих точек, за исключением начальной, восстанавливаются перпендикуляры. На них откладываются высоты в квадратах миллиметров. Например, первое расстояние от начала линии АВ до первого сантиметра равно 10 мм, но берется Д,, часть этого расстояния, т.-е. 1 мм, и возводят его в квадрат. Но единица в квадрате равна единице, а потому отмечают на первом перпендикуляре точку, удаленную от основной линии АВ на 1 миллиметр. Второй перпендикуляр отстоит от начала линии АВ на 2 сантиметра, т.-е. на 20 мм; их делят на 10, получают 2 мм и возводят их в квадрат; по.лучают 4 мм и откладывают их на втором перпендикуляре, затем делят расстояние от начала линии АВ до третьего перпендикуляра, равное 30 мм на 10, получают 3 мм, возводят их в квадрат, получают 9 мм и откладывают их на (т.-е. эту высоту) третьем перпендикуляре и т. д. Полученные таким образом точки :оединяют между собой по лекалу и получают нужную кривую. Можно, конечно, вычислить промежуточные точки и промежуточные между ними точки высот и построить кривую с любой степенью точности. Кривая эта, более пологая, чем кривая обратно пропорциональная квадратам расстоянии, напоминает ветвь параболы и, будучи вырезана из стального листа, дает дорожку, по которой может катиться ролик при боковом нажиме на него. Необходимо еще ввести между кривой и якорем десятикратный рычаг, который уменьшал бы в 10 раз длину пути, проходимого роликом по этой кривой, ибо, уменьшив в 10 раз высоты кривой, увеличивают в 10 раз длину пути, проходимого роликом под действием якоря магнита и необходимую ролику для того, чтобы подняться или опуститься настолько, как если б он катился по кривой обратно пропорциональной квадратам расстояний. Необязательно отношение в 10 раз при постройке кривой и при передаточном рычаге; могут быть и другие отношения, например, в i/i2 15... -
Пусть, например, ролик стоит на начальной точке АБ, а якорь находится на некотором расстоянии от полюса. Если якорь пойдет на 2 мм к полюсу, то ролик пройдет 2 сантиметра и поднимается по кривой на 4мм, т.-е. если якорь подойдет на 3 мм, то ролик пройдет 3 сантиметра и поднимется на 9 мм (т.-е. 3 9) и т. д.
Нужно так отрегулировать устройство, чтобы эти движения были, так сказать, синхроничны и совпадали по своим ходам и усилиям. Предлагаемое устройство может быть построено лишь с известной степенью точности; его действие состоит в том, что ролик, находясь под действием магнита, останавливается на любом месте кривой и самым незначительным усилием может быть передвинут на другое место ее, выше или ниже прежнего, и должен остановиться на новом месте, несмотря на то-ближе ли или дальше от полюса магнита находится якорь.
Усилие тяги, нужное для перемещения ролика Р по кривой,зависит от ее крутизны. Но вес самого ролика, во-первых, слишком мал по сравнению с усилиями, которые передаются ему отякоря магнита, а во-вторых, не может удобно регулироваться по силе магнитного притяжения, а потому нужно приспособление, которое могло бы давать известную нагрузку на ролик, для отрегулирования устройства. Ролик Я не может, под действием боковой тяги от рычага Е, катиться вверх по кривой, если она будет чрезмерно крута, как например, кривая обратно пропорциональная квадратам расстояний, крутизну которой, по этой причине, пришлось уменьшить. Для того, чтобы придать ролику Р нужный вес, при котором и при данной крутизне кривой, он смог бы оказывать нужное сопротивление тяге якоря, служит рычаг Г, с передвиж.ной гирей Д, опирающийся на ось ролика Р посредством шатуна 3. Чем гиря Д установлена ближе к концу рычага Т, сочлененного с шатуном 3, тем ролик Р нагружен :ильнее, а чем гиря Д ближе к .другому концу рычага Г, сочлененному с неподвижной опорой, т.-е. ушком Ф, тем нагрузка на ролик Р меньше, как при передвижении боковой передвижной гири на десятичных весах. Есть еще один фактор кроме веса ролика Р, крутизны кривой и силы тяги-это скорость движения ролика по кривой, но этот фактор здесь роли не играет потому, что ролик Р не катится по
кривой с какой-то скоростью, влияющей на работу усилия.
Согласно схематического чертежа ролик соединен при помощи тяги О с длинным рычагом Е, к короткому плечу этого рычага присоединена магнитная масса К, находящаяся в поле магнита, электромагнита или соленоида М Отношение короткого плеча рычага Е к его длинному
рычагу равно -. Высоты криволи/ IV неиных направляющих в (-) раз
больше оснований.
Предмет патента. Устройство для уравновешивания магнитного притяжения магнитной массы в поле магнита, электромагнита или соленоида, характеризующееся применением находящегося под нагрузкой Д ролика Р, катящегося по криволинейным направ/
ляющим, высоты которых в (- 1 раз
больше оснований, и соединенного при помощи тяги О с длинным плечом рычага Е, к короткому плечу которого присоединена магнитная масса К, находящаяся в поле магнита, электромагнита или соленоида М., при чем отношение короткого плеча рычага Е к его длинному
1 плечу равно -.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические пружинные весы | 1938 |
|
SU58150A1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2003 |
|
RU2257590C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2008 |
|
RU2364874C1 |
| Устройство для прессования листового табака в кипы | 1957 |
|
SU114433A1 |
| Электромеханический тормоз | 1929 |
|
SU26342A1 |
| Прибор для учета количества пропущенных вагонеток, имеющих вес, равный заранее заданному или превышающий таковой | 1929 |
|
SU22939A1 |
| Гидроимпульсный вибратор для жидкостной обработки капиллярно-пористых материалов | 1989 |
|
SU1646616A1 |
| Платформенные весы | 1939 |
|
SU60186A1 |
| Одно-коленчатый балансир к глубоким насосам | 1924 |
|
SU3603A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |


