фиг.1
Изобретение относится к технике возбуждения механических колебаний и может быть использовано для работы в аппаратах гидродинамической обработки капиллярно-пористых материалов, например жидкостной обработки кожевенного сырья, войлока, текстиля
Цель изобретения - повышение надежности и производительности вибратора
На фи 1 и 2 представлены схемы вибратора, на фиг 3 - механическая характеристика крутизны постоянного многополюсного магнита, на фиг 4 - схема удерживающего элемента
Вибратор содержит корпус 1 с установ1С
пропорционально квадрату расстояния от полюсов, то действие магнита после отрыва подвижной пластины 4 ог полюсов тормозить ее движение практически не будет Подвижная пластина под действием силы Fn отталкивается в рабочую среду, создавая гидравлический импульс
Для уменьшения вихревых токов в пластине, возникающих в процессе ее перемещения, которые могли бы тормозить ее движение, пластина изготовляется их магнито- диэлектрика или из набора полос трансформаторной стали, расположенных перпендикулярно полюсам постоянного магннта 3 Сила отталкивания подвижной пластины 4
1енным на нем электродвигателем 2, удер- определяется силой, создаваемой магнитом
живающий элемент 3, подвижную пластину 4. установленную в корпусе 1 параллельно стенке с рабочим отверстием с возможностью взаимодействия с удерживающим элементом 3, тяги 5, закрепленные на
3, которую можно pei улировать, изменяя количество полюсов, а также устанавливая прокладки между полюсами и подвижной пластиной 4 Процесс отталкивания продолжается до тех пор, пока пружина 6
подвижной пластине 4, пружины 6, один 20 не распрямится и шарнир штанги 7 не упрет- концы которых соединены с тягой 5, а друся в ограничивающий стопор 12 В процессе
10
гие со штангой 7, которая посредством шатуна 8 и кривошипа 9 соединена с валом 10 электродвигателя 2, шарнир штанги
дальнейшего вращения вала 1U кривошип 9 снова поднимается вверх, посредством 5 поднимает подвижную пластину 4
7 и пружина 6 зажаты между регулиро- вверх и последняя притягивается к полювочным стопором 11 и ограничивающим сто пором 12, закрепленными на тяге 5, а подвижная пластина 4 соединена с корпусом 1 через гибкое герметизирующее уппотнение Вибратор устанавливается таким образом, чтобы подвижная пластина 4 контактировала с рабочей средой
Вибратор работает следующим образом В исходном состоянии кривошип 9, закрепленный на валу 10 электродвигателя 2, находится в верхнем положении (фиг 1) При том прчжина 6 разжата, штата 7 под- 5 нята зверх шатуном 8, а ее шарниры прижаты к 01 раничивающим стопорам 12 благодаря небольшому прижатию со стороны пружин 6 Соответственно тяги 5 находятся в верхнем положении, а подвижная пластина
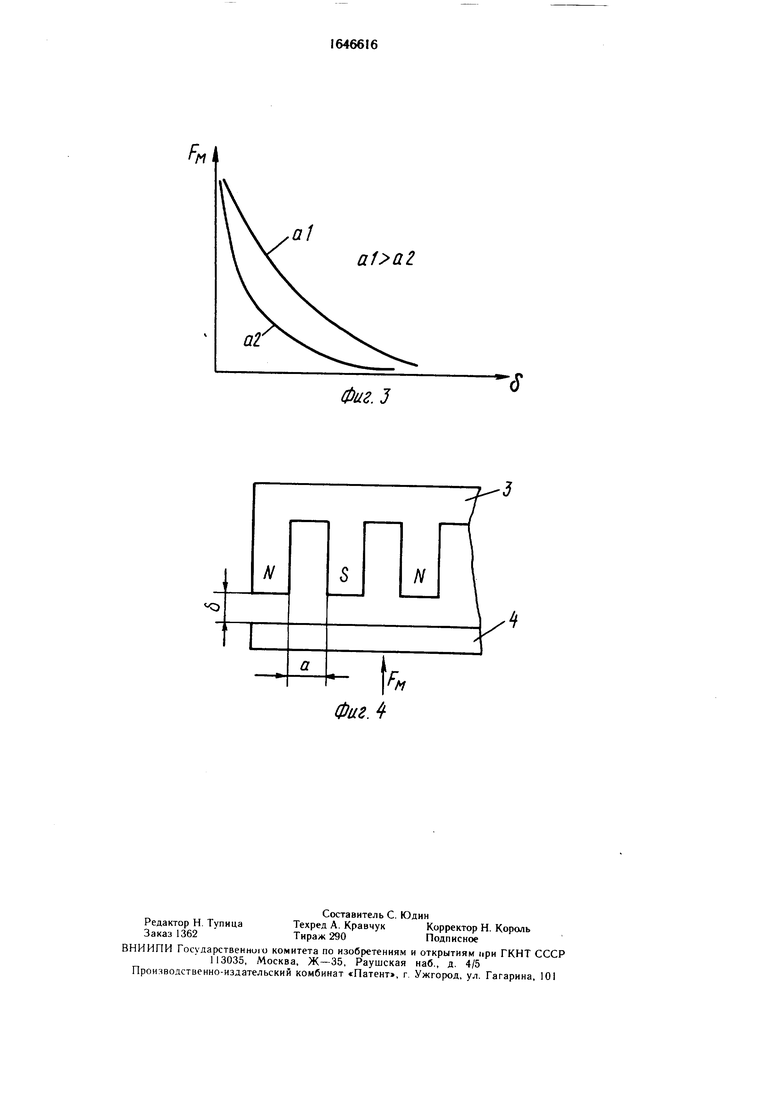
сам постоянного многополюсного магнита 3. Затем цикл работы вибратора повторяется. Эффективность работы вибратора возрастает в зависимости от крутизны механической характеристики магнита (фиг 3) Чем Зс круче убывает сила удержания подвижной пластины 4 в зависимости от расстояния ее до полюсов (б), тем меньше тормозящее действие магнитного поля в момент образования гидравлического импульса, тем больше сила гидравлического импульса и короче его длительность, т е эффективнее работа вибратора Вид характеристики при определенных свойствах материала магнита существенно зависит от расстояния (а) между полюсами (фиг 4) Чем меньше расстояние (а), тем круче характеристика
4 прижата к полюсам постоянного много- 40 Однако минимальное расстояние (а) межд;
полюсами ограничено величиной просачивания поля в зазоре между полюсами, т е магнитное поле частично замыкается через подвижную пластину 4, а через за- .J- зор между полюсами При этом снижается сила удержания подвижной пластины 4. Экспериментально установлено, что оптимальная величина расстояния (а) в 3-5 раз превышает величину рабочего хода криво- шипно-шатунного механизма.
полюсного магнита 3 При включении электродвигателя 2 вал 10 начинает поворачиваться, кривошип 9 перемещает шатун 8 вни, который увлекает за собой штату 7 Однако тяги 5 остаются неподвижными, поскольку подвижная пластина 4 прижата к полюсам постоянного многополюсного магнита 3 с силой Fff Это приводит к сжатию пружин 6, поскольку их нижние концы опираются на стопоры 11, а верхние сжимаются за счет скольжения шарнира штанги 7 по тяге 5 Сжатие пружин продолжается до тех пор, пока сила сжатия пружин Fn не уравновесит силу удержания пластины При достижении такого равновесия происходит отрыв подвижной пластины
50
Экономичность вибратора обусловлена тем, что удержание пластины в процессе накопления энергии в пружинах производится не электромагнитом, а постоянным магнитом, работающим без специальной сис4 от постоянного многополюсного магнита 55 темы управления Кроме того, при неболь3 и ускоренное перемещение пластины 4 в сторонч рабочей среды Поскольку сила притяжения магнита 3 убывает обратно
шом поджатии пружин можно избежать люфта вблизи верхнего положения. Процесс накопления энергии в пружинах происходит
пропорционально квадрату расстояния от полюсов, то действие магнита после отрыва подвижной пластины 4 ог полюсов тормозить ее движение практически не будет Подвижная пластина под действием силы Fn отталкивается в рабочую среду, создавая гидравлический импульс
Для уменьшения вихревых токов в пластине, возникающих в процессе ее перемещения, которые могли бы тормозить ее движение, пластина изготовляется их магнито- диэлектрика или из набора полос трансформаторной стали, расположенных перпендикулярно полюсам постоянного магннта 3 Сила отталкивания подвижной пластины 4
определяется силой, создаваемой магнитом
3, которую можно pei улировать, изменяя количество полюсов, а также устанавливая прокладки между полюсами и подвижной пластиной 4 Процесс отталкивания продолжается до тех пор, пока пружина 6
не распрямится и шарнир штанги 7 не упрет- ся в ограничивающий стопор 12 В процессе
10
дальнейшего вращения вала 1U кривошип 9 снова поднимается вверх, посредством 5 поднимает подвижную пластину 4
вверх и последняя притягивается к полю5
сам постоянного многополюсного магнита 3. Затем цикл работы вибратора повторяется. Эффективность работы вибратора возрастает в зависимости от крутизны механической характеристики магнита (фиг 3) Чем с круче убывает сила удержания подвижной пластины 4 в зависимости от расстояния ее до полюсов (б), тем меньше тормозящее действие магнитного поля в момент образования гидравлического импульса, тем больше сила гидравлического импульса и короче его длительность, т е эффективнее работа вибратора Вид характеристики при определенных свойствах материала магнита существенно зависит от расстояния (а) между полюсами (фиг 4) Чем меньше расстояние (а), тем круче характеристика
0 Однако минимальное расстояние (а) межд;
Экономичность вибратора обусловлена тем, что удержание пластины в процессе накопления энергии в пружинах производится не электромагнитом, а постоянным магнитом, работающим без специальной сисшом поджатии пружин можно избежать люфта вблизи верхнего положения. Процесс накопления энергии в пружинах происходит
плавно в ходе вращения кривошипа и снижает уровень шума при его работе в связи с отсутствием ударов при притягивании якорей к статорам накопительных электромагнитов. Наряду с указанным в предлагаемом вибраторе достигается более полное использование инерции вращающегося ротора, что позволяет повысить частоту следования импульсов. Даже в моменты фор мирования импульсов происходит накопление энергии в виде кинетической энергии вращающегося ротора.
Формула изобретения
1. Гидроимпульсный вибратор для жидкостной обработки капиллярно-пористых материалов, содержащий корпус с рабочим отверстием в одной из стенок, подвижную пластину, установленную в рабочем отверстии корпуса через гибкое герметизирующее
5
0
уплотнение, привод перемещения подвижной пластины, тяги, соединенные с подвижной пластиной, пружины, расположенные между закрепленными на тягах регулировочными и ограничивающими упорами, удерживающий элемент, установленный в корпусе с возможностью взаимодействия с подвижной пластиной, отличающийся тем, что, с мелью повышения надежности и производительности, он снабжен двумя кривошипно-шатун- ными механизмами, а привод перемещения подвижной пластины выполнен в виде электродвигателя, рабочий вал которого расположен параллельно плоскости подвижной пластины, при этом оба конца вала двигателя через кривошипно-шатукные механизмы и через штанги связаны с пружинами, а удерживающий элемент выполнен в виде постоянного многополюсного магнита.
2. Вибратор по п. 1, отличающийся тем, что подвижная пластина выполнена из магнитодиэлектрика.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| ДВИГАТЕЛЬ НА ПОСТОЯННЫХ МАГНИТАХ | 2000 |
|
RU2177201C1 |
| СТАНОК-КАЧАЛКА | 2009 |
|
RU2406874C1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ПОГРУЖЕНИЯ СВАЙ, ШПУНТА И Т. П. ЭЛЕМЕНТОВ | 1966 |
|
SU215099A1 |
| Способ уравновешивания подвижных масс | 1982 |
|
SU1082501A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 2001 |
|
RU2217314C2 |
| Кривошипный пресс | 1980 |
|
SU1046118A1 |
Изобретение относится к технике возбуждения механических колебаний и может быть использовано для работы в аппаратах гидродинамической обработки капиллярно- пористых материалов. Цель изобретения - повышение надежности и производительности. Устройство содержит корпус 1, в рабочем отверстии которого размещена подвижная пластина 4, связанная через тяги 5, пружины 6, штангу 7 и кривошипно-шатунный механизм с валом 10 электродвигателя 2. При вращении вала 10 электродвигателя 2 происходит перемещение штанги 7. Новым является введение двух кривошипно-шатун- ных механизмов, и средство перемещения подвижной пластины выполнено в виде электродвигателя, рабочий вал которого установлен параллельно плоскости подвижной пластины, при этом одни концы кри- вошипно-шатунных механизмом связаны с валом двигателя, а их другие концы шар- нирно соединены с пружинами, лри этом удерживающий элемент выполнен в виде постоянного многополюсного магнита.. 1 з.п ф-лы, 4 ил. (/
HHF
У//////Ш7//ЛУ/////ЛШ
игмгигуп
а
1г
Гп
Ш
wss/ж
Щи г. г
Фиг. 4
Фиг. J
| Электромагнитный вибратор | 1981 |
|
SU995890A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
