1
Изобретение относится к устройствам для автоматического управления станками.
Известна контурпая система программного управления, содержащая последовательно соединенные устройство ввода основной программы, устройство подпрограмм, блок декодирования и блок управления приводом 1.
Иаиболее близко к изо.бретению устройство для числового программного управления, содержащее последовательно соединенные блок памяти, блок декодирования, блок управления и шаговые двигатели координатных перемещений, а также элементы И по числу координат 2.
Однако в этих устройствах не обеспечивается контроль за их работой с глубиной диагностирования неисправностей до отдельной координаты, т. е. недостаток их заключается в узких функциональных возможностях.
Целью изобретения является расщирение функциональных возможностей устройства путем обеспечения контроля его работы с глубиной диагностирования неисправностей до отдельной координаты.
Для этого предлагаемое устройство дополнительно содержит элемент задержки, датчики перемещений по координатам, триггеры по числу координат, выходы которых подключены к первым входам элементов И, вторые входы которых подключены ко входу лемен2
та задержки и информационному выходу блока декодирования, выход элемента задержки подсоединен к нулевым установочным входам триггеров, счетные входы которых
подсоединены к выходам датчиков перемещений по координатам, подсоединенных к щаговым двигателям координатных перемещений, едпничные входы триггеров подключены к выходам блока памяти, а выходы элементов
И являются контрольными выходами устройства.
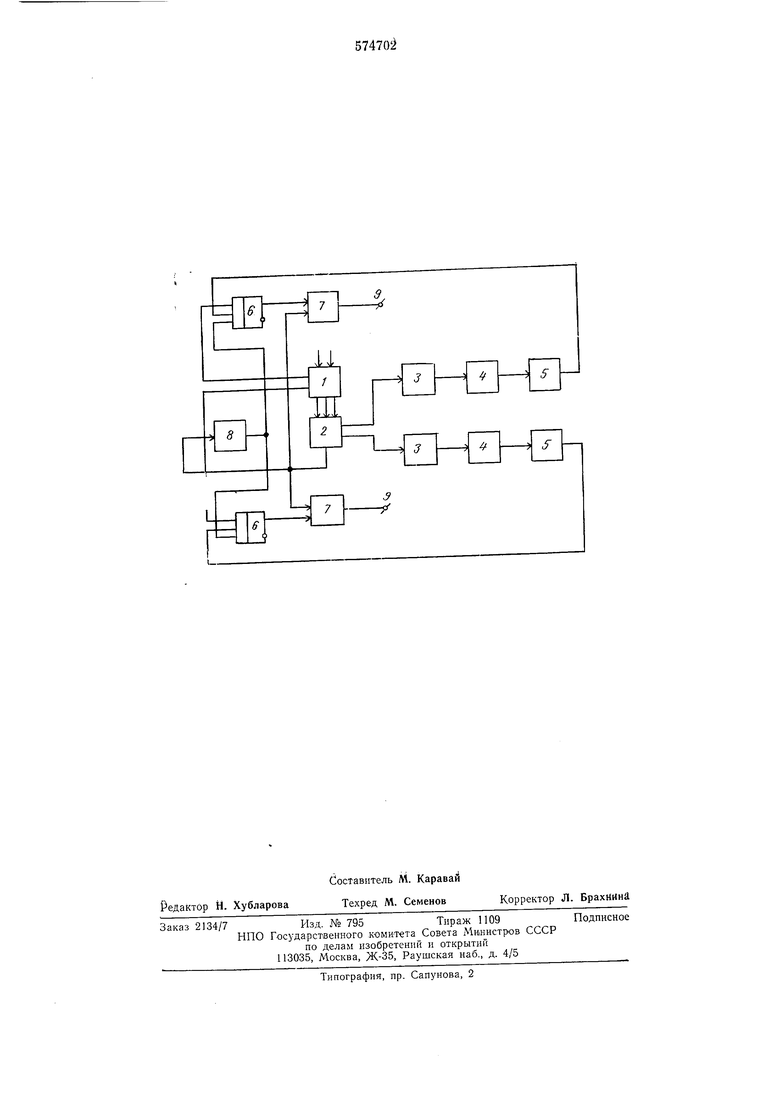
На чертеже приведена функциональная схема предлагаемого устройства для числового программного управления.
Устройство содержит блок 1 памяти, блок 2 декодирования, блок 3 управления, щаговые двигатели 4 координатных перемещений, датчики 5 перемещений по координатам, триггеры 6 по числу координат, элементы И 7 по
числу координат, элемент 8 задержки, контрольные выходы 9.
В исходном состоянии информация на входе и выходе блока памяти и блока декодирования отсутствует. Триггеры 6 находятся в
нулевом полол-:ен11И, на выходах 9 сигнала нет. Единичный вход каждого триггера 6 подключен к разряду величины перемещения буферной памяти блока 1 памяти одноименной координаты с весовым коэффициентом 2°.
Устройство работает следующим образом. Информация кадра от исто чника информации (на чертеже не показан) через буферную и рабочую память блока 1 памяти поступает на вход блока 2 декодирования и на единичные установочные входы триггера 6, который обеспечивает декодирование этой информации и выдачу унитарного кода на входы блоков 3 управления. Каждый обработанный шаговым двигателем 4 координатного перемещения шаг преобразуется датчиком 5 в импульс, который по счетному входу управляет триггером 6 одноименной координаты. После обработки информации кадра с выхода блока 2 декодирования на входы элементов И 7 и элемента 8 задержки поступаетсигнал, который опрашивает состояние триггеров 6 и через элемент 8 устанавливает их в нулевое положение. Если при этом один из триггеров 6 находится в «единичном положении, то по одноименной координате происходит отказ. Действительно, наличие «1 в разряде с весовым коэффициентом 2° кода величины перемещения при исправной работе устройства соответствует нечетному числу единиц унитарного кода с выхода блока декодирования 2, а следовательно нечетному опрокидыванию триггера 6 одноименной координаты. Информация этого разряда величины перемещения по координате в начале обработки кадра записывается в триггер 6 одноименной координаты по единичному установочному входу. В конце кадра при опросе с блока 2 декодирования триггеры 6 должны находиться в нулевом положении. Таким образом в устройстве обнаруживаются отказы, приводящие к нечетному искажению информации величины перемещения по соответствующей координате. При этом в конце обработки кадра с контрольного выхода 9 соответствующей координаты выдается сигнал «Неисправность, что обеспечивает определение неисправного канала. При использовании данного изобретения сокращаются потери рабочего времени в процессе эксплуатации системы «устройство для числового программного управления - станок путем непрерывного контроля за работой устройства с глубиной диагностирования неисправностей до отдельной координаты. Формула изобретения Устройство для числового программного управления, содержащее последовательно соединенные блок памяти, блок декодирования, блок управления и шаговые двигатели координатных перемещений, а также элементы И по числу координат, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит элемент задержки, датчики перемещений по координатам, триггеры по числу координат, выходы которых подключены к первым входам элементов И, вторые входы которых подключены ко входу элемента задержки и нформационнО;Му выходу блока декодирования, выход элемента задержки подсоединен к нулевым установочным входам триггеров, счетные входы которых подсоединены к выходам датчиков перемещений по координатам, подсоединенных к шаговым двигателям координатных перемещений, единичные входы триггеров подключены к выходам блока памяти, а выходы элементов И являются контрольными выходами устройства. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР №408276, кл. G 05В 19/18, 1970. 2. Авторское свидетельство СССР ЛЬ 434380, кл. G 05В 19/18, 1971.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| Устройство для числового программного управления станком | 1978 |
|
SU744465A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1980 |
|
SU959036A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1987 |
|
SU1481714A2 |
| Устройство для программного управления | 1980 |
|
SU920637A1 |
| Устройство для числового программного управления станком | 1980 |
|
SU924674A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Линейный интерполятор | 1976 |
|
SU697976A1 |