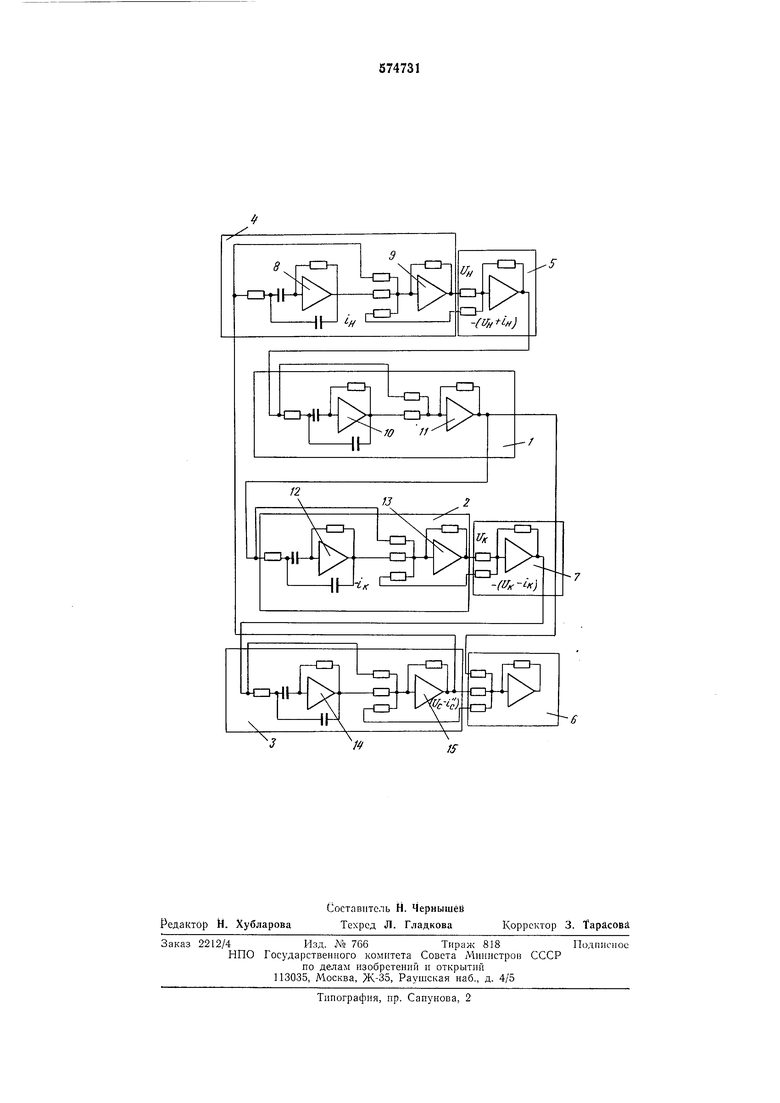
Изобретение относится к области аналогового моделирования и может быть использовано при моделировании динамических систем, имеющих звенья с распределенными параметрами. Известны устройства для моделирования звеньев с распределенными параметрами, содержащие блоки запаздывания и операционные усилители 1. Наиболее близко к изобретению по технпческой сущности устройство для моделирования звена с расиределенными параметрами 2, содержащее сумматоры и блоки запаздывания, причем выход первого блока запаздывания подключен ко входу второго, а выход третьего блока запаздывания соединеи со входом четвертого. Однако это устройство имеет сравнительно невысокую точность моделирования. С целью повышения точности моделирования в предлагаемом устройстве для моделирования звена с распределенными параметрами, содержащем сумматоры и блоки запаздывания, выходы четвертого блока запаздывания через первый сумматор подключены ко входу первого блока запаздывания, выход которого соединен с одним входом второго сумматора, другие входы второго сумматора подключены к выходам третьего блока запаздывания, вход которого через третий сумматор оединен с выходами второго блока запаздыания. На чертеже показана схема предлагаемого устройства для моделирования звена с распределенными параметрами. Устройство содержит блоки запаздывания 1-4 и сумматоры 5-7, причем выход первого блока запаздывания 1 подключен ко входу второго блока запаздывания 2, а выходы четвертого блока запаздывания 4 через первый сумматор 5 подключены ко входу первого блока запаздывания 1. Выход блока 1 соединен с одпим входом второго сумматора 6, другие входы которого подключены к выходам третьего блока запаздывания 3, а вход блока 3 через третий сумматор 7 соединен с выходами второго сумматора 2. Устройство работает следующим образом. На вход блока запаздывания 4, содержащего усилители 8, 9, подается сигнал, представляющий собой разность переменных произвольной внутренней точки (через ic обозначен ток модели элементов, подсоединенных к внутренней точке). На выходе усилителя 9 образуется сумма двух сигналов - задержанного инвертированного сигнала, поданного на вход блока запаздывания 4, и сигнала IH, поданного на дополнительный вход усилителя 9 первого блока запаздывания с обратным знаком, которая равна Vn - напряжению в начале линии. Далее эта сумма иостунает на нервый вход первого сумматора 5, на второй вход которого подается сигиал iu- На выходе нервого выходного сумматора 5 образуется сигнал, иредставляющий собой сумму переменных начальной точки с обратным знаком. Задержанный на блоке 1, содержащем усилители 10 и 11, сигнал дает сумму неремеипых в произвольной внутреиией .
Затем эта еумма поступает на вход второго блока заназдывания, образованного усилителями 12 и 13. На выходе усилителя 13 второго блока запаздывапня 2 образуется еумма двзх сигналов ипвертированного задержанного сигнала, поданного па вход блока запаздывания 2, и снгпа.Га, поданного на дополнительный вход усилителя 13, которая равна УК - папряжеиню в конечной точке модели звена. Этот еигнал подается на первый вход третьего выходного сумматора 7, па второй вход которого нодаетея сигнал /к. На выходе третьего сумматора 7 образуется сигнал, представляющий собой разность переменных в конечной точке с обратным знаком. Этот сигнал нодаетея на третий блок запаздывания 3, образованный усилителями 14 и 15.
На выходе усилителя 15 образуется сумма двух сигналов - задержанного инвертированного еигиала, поданного на вход блока запаздывания 3, и инвертированного сигнала, ноданного иа дополнительный вход усилителя 15. В результате иа выходе усилителя 15 получается разиость переменных произвольной точки, которая подается на вход четвертого блока запаздывания.
Напряжение произвольной внутренней точки образуетея на выходе сумматора 6 ири суммировании трех сигналов: сумма (V,: + ic) переменных произвольной внутренней точки, не включающая в себя ток элементов, подсоединенных к ней; разность иеременных произ вольпой внутреиией точки (Vc-гс), нрпчем ток, входяпиш в эту разность /с , включает а к себя ток элементов, подсоедииенных к произвольной внутренней точке (ic).
Новышенне точноетн моделирования достигается тем, что переменные произвольной внутренней точкн звена образуются в одном Q замкнутом контуре с получением переменных начальной и конечной точек, чем обеспечиваетея сквозной канал, построенный из блоко иостоянного запаздывания и суммнрующнх уснлителей.
Фор м у л а и 3 о б р е т е и и я
Устройство для моделирования звена с рас0 иределенными параметрами, содерл ащее сумматоры н блоки запаздывания, причем выход нервого блока заиаздывания нодключен ко входу второго, а выход третьего блока запаздывания соединен со входом четвертого, от5 лнчающееся тем, что, с целью иовыщення точности моделирования, выходы четвертого блока запаздывапия через первый еумматор иодключеиы ко входу первого блока запаздывапня, выход которого соедииеи с одним входом второго сумматора, другие входы второго сумматора иодключены к выходу третьего блока заиаздывания, вход которого через третий сумматор соедииен с выходами второго блока заиаздывания.
Нсточники информации, прииятые во внимаиие при экспертизе
1.Нримененпе аналоговых вычислительных машин в энергетических системах. М., «Энергия, 1971, с. 137.
2.Авторское свидетельство СССР Л 452014 кл. G 06G 7/50, 1974.
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования звена с распределенными параметрами | 1972 |
|
SU452014A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОУСТОЙЧИВЫХ СОСТОЯНИЙ ОБЪЕКТА БИОЛОГИЧЕСКОЙ СИСТЕМЫ | 1970 |
|
SU273538A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Устройство для моделирования силовыхпАРАМЕТРОВ пРОцЕССА зубОфРЕзЕРОВАНияпО МЕТОду ОбКАТКи | 1979 |
|
SU805353A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система регулирования диаметра жил на бумагомассных машинах | 1988 |
|
SU1667016A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЛИНИЙ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 1970 |
|
SU275541A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |