Изобретение относится к автоматизации судовых силовых установок. Известна система управления глав ным двигателем и винтом регулируемого шага, содержащая блок задания режимов работы, связанный через программный блок, регулятор наг рузки, коммутатор, соединенный одним из входов непосредственно с выходом блока задания режимов, и исполнительный механизм винта регулируемого шага с механизмом изменения шага винта с датчиком шага и через исполнительный механизм двигателя с регулятором оборотов двигателя, снабженного датчиком нагрузки, выход которого соединен с одним из входов регулятора нагрузки 1 . Однако эта система не обеспечивает эксплуатацию установки в оптимальных режимах и необходимой эко номичности работы силовой установк Известна также система управлени судовым главным двигателем и винтом регулирования шага, содержащая бло задания режимов работы, соединенный с программным устройством, первый выход которого соединен с одним из входов регулятора нагрузки, другой .вход которого подключен к датчику нагрузки главного двигателя, снабженного всережимным регулятором, а выход - к одному из входов блока сравнения, другой вход которого соединен с датчиком шага винта, и коммутатор, выход которого соединен с исполнительным механизмом изменения шага винта 2. Данная, система обеспечивает надежное раздельное управление оборотами главного двигателя и винтом регулируемого шага и защиту двигателя от перегрузки, но не обеспечивает Э1 ономичность работы силовой установки на всех режимах переднего хода. Цель изобретения - повышение экономичности работы силовой установки на всех режимах переднего хода. Эта цель достигается тем, что програ лмное устройство система состоит из соединенных с его входом блока прогр амм экономичной работы установки на малых нагрузках, блока оптимальной програглмы управления частотой вращения двигателя и подключенных к его выходу блока программ экономичной установки, блока программ заградительной характе ристики двигателя и блока перек.люче ния программ, а также блока выбора программ, входы которого соединены с выходами блоков программ эконо.мичной работы и заградительной характеристики двигателя, а выход блока выбора программ соединен с первым выходом программного устройства, при этом выходы блока переключения программ и блока программ экономичной работы установки на малых нагрузках соединены соответственно со торым и третьим выходами программного устройства и подключены к первому и второму входам коммутатора, третий вход которого соединен с выходом блока сравнения.
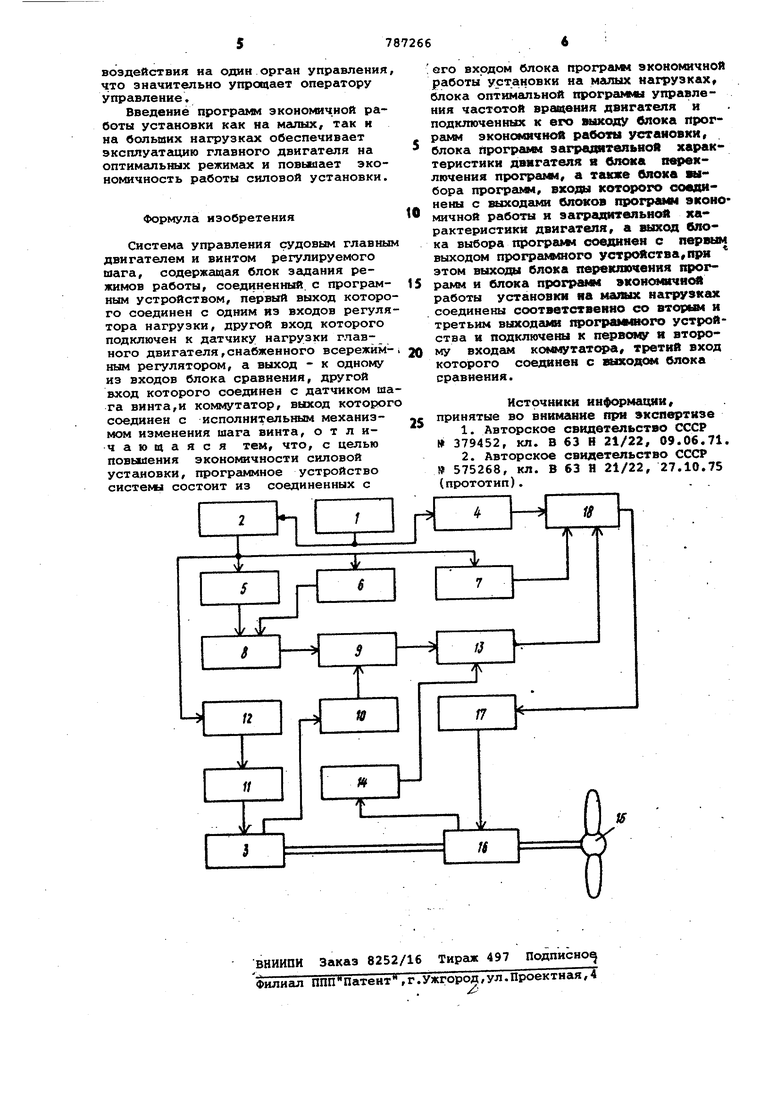
На чертеже приведена функционсшьная схема системы управления судовым главным двигателем и винтом регулируемого шага.
Система содержит блок 1 задания режимов, соединенный с программным устройством, в сортав которого входят блок 2 оптимальной программы управления частотой вращения двигателя 3, блок 4 программ экономичной работы установки на малых нагрузках, подключенные к выходу блока 2 блок 5 программы экономичной работы установки,блок 6 программы заградительной характеристики двигателя 3 и блок 7 переключения программ, а также блок 8 выбора программ, соединенный своими входами с выходами блоков 5 и б, а выход его является первым выходом программного устройства и подключен к одному из входов регулятора 9 нагрузки, второй вход которого соединен с датчиком 10 нагрузки двигателя 3, снабженного всережимным регулятором 11, связанным с исполнительным механизмом 12, вход которого соединен с выходом блока 2.
Выход регулятора 9 соединен с одним из входов блока 13 сравнения, к другому входу которого подключен датчик 14 шага винта 15 с механизмом 16 изменения шага, связанным с его исполнительным механизмом 17, вход которого соединен с выходом коммутатора 18, входы которого соединены соответственно с выходами блок;рв 4, 7 и 13.
Система работает следующим образом.
При воздействии на блок 1 задания режимов работы последний вырабатывает командный сигнал на блок 2 оптимальных программ управления частотой вращения двигателя и блок 4 программ экономичной работы установки на малых нагрузках.
При задании оператором режима, соответствующего малой нагрузке силовой установки, блок 2 вырабатывает на своем выходе постоянный по величине сигнал, равный, например, оборотам холостого хода. При этом исполнительный механизм 12 воздействует на всережимный регулятор 11 двигателя .3, который поддерживает постоянными обороты двигателя 3. Одновременно блок 4 вырабатывает на своемвыходе сигнал, который через коммутатор 18 проходит на исполнительный механизм 17 и устанавливает органы управления механизма 16 изменения шага в згщанное положение.
При задании оператором режима,
0 соответствующего нагрузке силовой установки несколько большей, чем дви- гатель может развивать на оборотах холостого хода при максимальнс растворе винта, блок 7 вырабатывает
5 дискретный сигнал, по которому коммутатор 18 подключает к исполнительному механизму 17 выход блока 13. Одновременно производится перестройка всережимного регулятора 11, так как исполнительный механизм 12 получает
0 от блока 2 задание. При этом на регулятор 9 поступает сигнал от датчика 10, а через блок 8 выбора программ сигнал от блока 5 программ экономичной работы установки.
5
По этим двум сигналам регулятор 9 осуществляет управление шагом винта 15 таким образом, чтобы обеспечивалась Зс1данная программа управления по нагрузке силовой установки. При
0 этом в зоне малых нагрузок происходит изменение нагрузки двигателя 3 только за счет изменения частоты вращения двигателя при максимальном растворе шага винта, а на другом
5 участке программы изменение нагрузки двигателя осуществляется как за счет изменения частоты вращения двигателя 3, так и за счет изменения раствора шага винта 15.
Управление установкой на больших
0 нагрузках производится аналогичным образом на соответствукяцем участке прогрг1ммы за счет одновременного изменения частоты вращения двигателя и шага, винта.
5
В случае задания оператором режима, превышающего заградительную характеристику двигателя, блок 8 выбора программ подключает к регулятору 9 нагрузки выход блока 6 програм0мы заградительной характеристики и тем самым обеспечивает зшдиту двигателя от перегрузки.
Для ускорения вывода установки на заданный режим предусмотрено воз5действие на блок 13 датчика 14 шага вигта 15. При этом, поскольку регуляторы нагрузки используются, как правило, типа интегральных, введение датчика 14 обеспечивает при незначиОтельном изменении выхода регулятора 9 нагрузки перемещение лопастей винта 15 со скоростью, обеспечиваемой механизм 16 изменения шага винта.
Таким образом, управление силовой установкой осуществляется с помощью
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1978 |
|
SU700375A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДОВОЙ ДИЗЕЛЬНОЙ УСТАНОВКОЙ С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА | 1973 |
|
SU363964A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Датчик загрузки двигателя | 1977 |
|
SU664060A1 |
| СТЕНД ДЛЯ ПРИРАБОТКИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2027982C1 |
| Система дистанционного автоматизированного управления судовыми двигателями | 1974 |
|
SU495234A1 |
