Изобретение относится к судостроению.
Известна система автоматического регулирования скорости хода судна путем изменения шага гребного винта 1.
Известна система управления судовым главным двигателем и винтом регулируемого шага (ВРШ), содержащая блок задания режимов работы, связанный через программный блок, регулятор нагрузки и исполнительный механизм винта регулируемого шага с механизмом изменения шага винта, с датчиком положения лопастей винта и посредством исполнительного механизма двигателя - с регулйтором оборотов двигателя, снабженным датчиком нагрузки, выход которого соединен с одним из входов регулятора нагрузки 2.
Однако известные системы не обладают достаточным быстродействием при смене режимов работы, что снижает их эксплуатационные характеристики.
Целью изобретения является улучшение эксплуатационных характеристик системы.
Цель достигается тем, что система снабжена сумматором, включенным в линию управления
винта регулируемого шага и связанным своими входами с регулятором нагрузки и датчиком положения лопастей винта, а выходами - с исполнительным механизмом винта регулируемого шага.
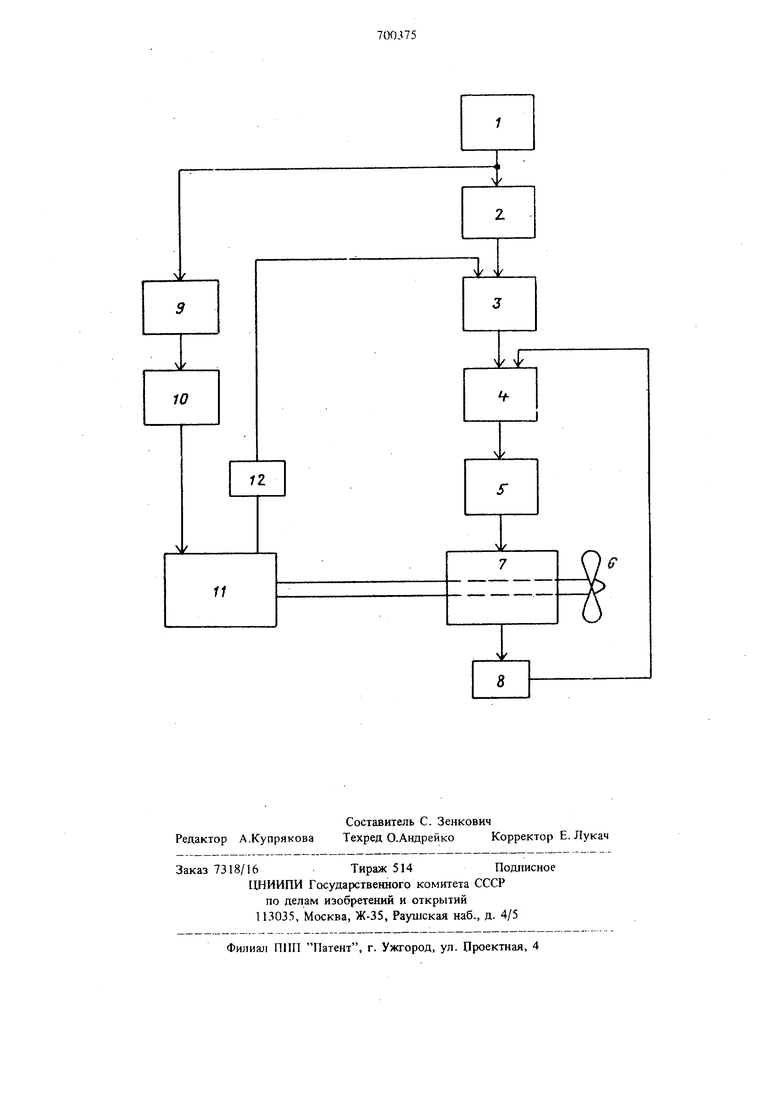
На чертеже изображена функциональная схема системы управления судовым главным двюателем и винтом регулируемого шага.
Система содержит блок 1 задания режимов работы, связанный одним из своих выходов через программный блок 2, регулятор 3 нагрузки, сумматор 4, исполнительный механизм 5 винта 6 регулируемого шага с механизмом 7 изменения шага, имеющим датчик 8 положения лопастей,соединенный со входом сумматора 4. Другой выход блока 1 задания связан через исполнительный механизм 9 главного двигателя iD с всережимным регулятором И оборотов главного двигателя .с главным двигателем 10, имеюшим датчик 12 нагрузки, соединенный со входом регулятора 3 нагрузки.
Система работает следующим образом.
При воздействии оператора на органы управлениэблок 1 задания вырабатывает задаюшдй
Сигнал - величину частоты вращения двигателя - на исполнительный механизм 9 и программный блок 2. Исполнительный механизм 9 главного двигателя при изменении задающего сигнала воздействует на всережимный регуяятор И, который устанавливает и поддерживает Частоту вращения двигателя 10, соединенного с ВРШ 6. Крутящий момент двигателя измеряется датчиком 12 нагрузки, с которого сигнал истинной величины нагрузки двигателя постуПает в регулятор 3 нагрузьси.
Программный блок 2 по заданной велич 1не частоты вращения формирует значение нагрузки двигателя в соответствии с заданной Программой управления. Этот сигнал поступает в регулятор 3 нагрузки, с выхода которого через сумматор 4 поступает на исполнительный механизм 5, регулирующий положение лопастей ВРШ посредством механизма 7. Датчик 8 вырабатывает сигнал истинной величины шаг;1 Ч подает его на вход сумматора 4, где корректирует сигнал регулятора 3 на1рузки.
В статическом режиме на выходе программного блока 2 и датчика 12 надрузки сигналы равны, выходной сигнал регулятора 3 равен ну;1гю, а выходные сигналы сумматора 4 и датчика 8 равны.
При изменении одного из входных сигналов регулятора нагрузки, например при изменении Задающего сигнала от блока 1 в сторону увелиЧения нагрузки, на выходе регулятора 3 поялля. ется сигнал на увеличение разворота лопастей ВРШ. Этот сигнал, прохо;5л через сумматор 4, йоздействует на исполнительный мехайизм 5, увличивающий разворот лопастей ВРШ, что призодит к увеличению сигнала на выходе датчика 8 и через сумматор 4 дополнительно влияет на механизм 5, еще больще увелишвающий разиорот лопастей. Увеличение разворота лопастей вызывает увеличение нагрузки двигателя 10, фиксируемое датчиком 12, и на входе в регулятор 3 сигналы выравниваются. При зтом сигнал на выходе регулятора 3 становится равным нулю.
Аналогично работает система при задании от блока 1 сигнала на уменьшении разворота лопастей.
Данная система управления уменьщает время вывода установки на заданный режим.
Формула изобретения
Система управления судовым главным двигателем и винтом регулируемого щага, содержащая блок задания режимов работы, связанный через программный блок, регулятор нагрузки и исполнительный механизм винта регулируемого шага с механизмом изменения щага,с датчиком положения лопастей пинта и посредством исполнительного механизма двигателя - с регулятором оборотов двигателя, снабженнь м датчиком нагрузки, выход которого соединен с одним из входов регулятора нагрузки, отличающаяся тем, что, с целью улучщения эксплуатационных характеристик системьц она снабжена сумматором, связанным своими входами с регулятором нагрузки и с датчиком положения лопастей винта, а выходами - с исполнительным механизмом викта регулируемого шага.
Источники информа1ми,
принятые во внимание при экспертизе
1.Патент Япония № 45-11262, кл. 84 Е - 1 84 D - 00, опублик. 1970.
2.Авторское свидетельство СССР № .575268, кл. В 63 h 21/22, 27. 10.75 (прототип).
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1979 |
|
SU787266A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| Устройство для управления гребным винтом регулируемого шага и двухступенчатым редуктором | 1980 |
|
SU906791A1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ГЛАВНЫМ ДВИГАТЕЛЕМ И ВИНТОМ РЕГУЛИРУЕМОГО ШАГА | 1973 |
|
SU379452A1 |
| Устройство управления двигателем внутреннего сгорания, снабженным винтом регулируемого шага | 1990 |
|
SU1728516A1 |
| Система автоматического управления | 1979 |
|
SU780684A2 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |