1
Изобретение может быть использовано в системах автоматического дистанционного управления судовыми силовыми установками.
Известны устройства, содержащие блок задания режима, блоки программирования заДания числа оборотов дизеля и угла поворота лопастей винта, блоки коррекции программ (автоматической или полуавтоматической) для обеспечения близости задаваемых режимов к оптимальным по экономичности и защиты от длительных перегрузок, исполнительные механизмы дистанционной перестройки регулятора числа оборотов дизеля и механизма изменения шага.
Предлагаемое устройство отличается от известных тем, что в нем дополнительно установлены блок автоматического снижения оборотов в начальный период реверса, один вход которого подключен к выходу блока программирования числа оборотов, другой - к выходу блока программирования шага, третий-к выходу датчика фактического шага винта, а выход подключен к входу исполнительного механизма перестройки регулятора оборотов, и блок защиты от кратковременных перегрузок, входы которого нодсоединены к выходам блока программирования шага и датчика нагрузки, а выход - к исполнительному механизму изменения шага.
Это позволяет повысить быстродействие системы и обеспечить оптимизацию управления устройства.
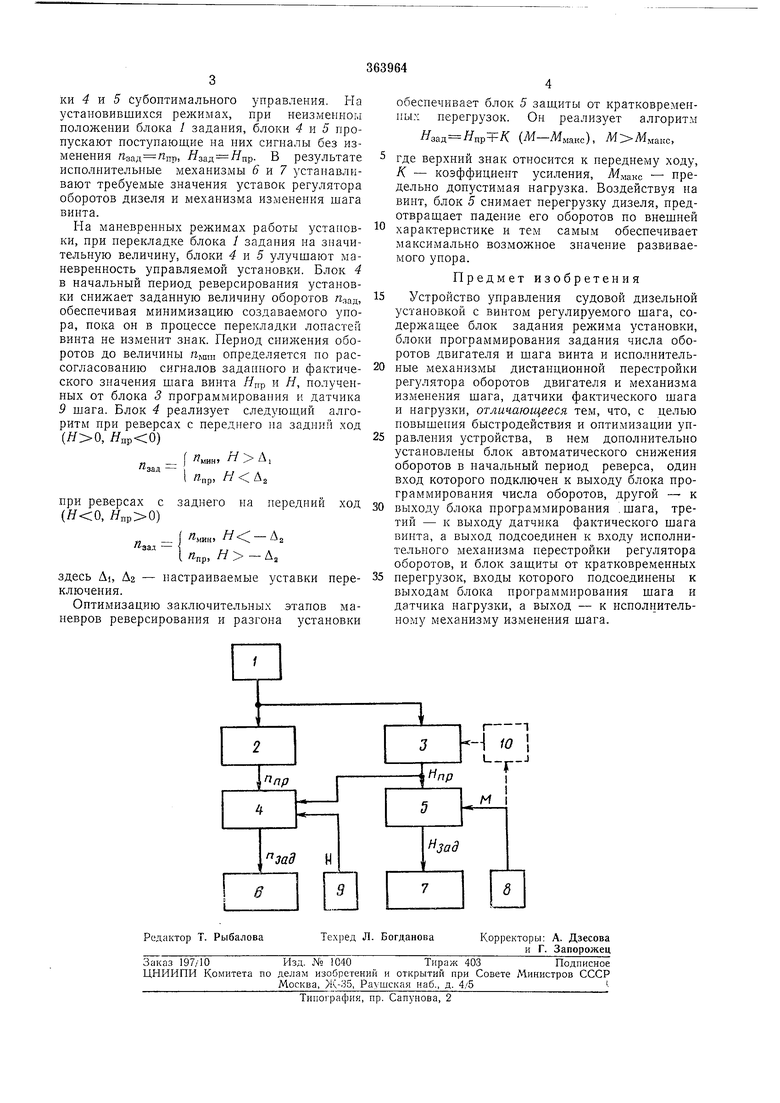
На чертеже показана блок-схема описываемого устройства.
Схема содержит блок / задания режима установки, блок 2 программирования задания оборотов двигателя, блок 5 программирования задания шага винта, блок 4 автоматического снижения оборотов в начальный период реверса, блок 5 защиты от кратковременных перегрузок, исполнительный механизм 6 дистанционной перестройки регулятора оборотов дизеля, исполнительный механизм 7 дистанционной перестройки механизма изменения шага винта, датчик 6 нагрузки дизеля, датчик 9 фактического шага винта и блок Ю коррекции програ.ммы управления тагом в1И1та.
Устройство работает следующим образом.
Режим работы устройства задает блок / задания, сигнал с которого поступает в блоки 2 и 3 программирования, формирующие сигналы задания оборотов дизеля Пар и шага ви.чта Я„р. Величина Япр может корректироваться по фактической нагрузке Л4 (крутящему моменту на валу пли перемещению органов тонливоподачи) коррекции.
Сип-алы от блоков программирования поступают на исполнительные механизмы 6 и 7 дистанционных линий через специальные блоки 4 и 5 субоптимального управления. На установившихся режимах, при неизменном иоложении блока 1 задания, блоки 4 и 5 пропускают поступающие на них сигналы без изменения , Язад Япр. В результате исполнительные механизмы 6 и 7 устанавливают требуемые значения уставок регулятора оборотов дизеля и механизма изменения шага винта.
На маневренных режимах работы устаповки, при перекладке блока 1 задания на значительную величину, блоки 4 и 5 улучшают маневренность управляемой установки. Блок 4 в начальный период реверсирования установки снижает заданную величину оборотов я.ад, обеспечивая минимизацию создаваемого упора, пока он в процессе перекладки лопастей винта не изменит знак. Период снижения оборотов до величины определяется по рассогласованию сигналов заданного и фактического значения шага винта Н„р и Я, полученных от блока 3 программирования и датчика 9 шага. Блок 4 реализует следующий алгоритм при реверсах с переднего иа задний ход (, )
. AI
«-- -1. « / .
Дпр, /У А,
При реверсах с заднего на передний ход (, )
«мин. -Лг
зад - пр) а
здесь Ai, АЕ - настраиваемые уставки переключения.
Оптимизацию заключительных этапов маневров реверсирования и разгона установки
обеспечивает блок 5 защиты от кратковременных перегрузок. Он реализует алгоритм
Язад Япр + : (УИ-УИмакс), Л| М„акс,
5 где верхний знак относится к переднему ходу, К - коэффициент усиления, - предельно допустимая нагрузка. Воздействуя на винт, блок 5 снимает перегрузку дизеля, предотвращает падение его оборотов по внешней характеристике и тем самым обеспечивает максимально возможное значение развиваемого упора.
Нредмет изобретения
Устройство управления судовой дизельной установкой с винтом регулируемого шага, содержащее блок задания режима установки, блоки программирования задания числа оборотов двигателя и шага винта и иснолнитель0 ныв механизмы дистанционной перестройки регулятора оборотов двигателя и механизма изменения шага, датчики фактического шага и нагрузки, отличающееся тем, что, с целью повышения быстродействия и оптимизации управления устройства, в нем дополнительно установлены блок автоматического снижения оборотов в начальный период реверса, один вход которого подключен к выходу блока программирования числа оборотов, другой - к
выходу блока программирования .шага, третий - к выходу датчика фактического шага винта, а выход подсоединен к входу исполнительного механизма перестройки регулятора оборотов, и блок защиты от кратковременных
перегрузок, входы которого подсоединены к выходам блока программирования шага и датчика нагрузки, а выход - к иснолрштельному механизму изменения шага.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Пневматическая система управления судовой установкой с винтом регулируемого шага | 1974 |
|
SU608704A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО | 1973 |
|
SU383651A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1979 |
|
SU787266A1 |
| Устройство для управления судовой дизельной установкой с винтом регулируемого шага (врш) | 1971 |
|
SU489094A1 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| Система дистанционного автоматизированного управления судовыми двигателями | 1974 |
|
SU495234A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДИЗЕЛЕМ И ВИНТОМ РЕГУЛИРУЕМОГО ШАГА | 1962 |
|
SU151578A1 |
| Система дистанционного управления главной судовой дизельной установкой | 1982 |
|
SU1063709A1 |
