Изобретение относится к технике измерения силы тяжести на подвижном основании и может использоваться при геофизических, геодезических, и астрономических исследованиях.
В практике отечественных гравиметрических измерений на подвижном основании (в частности, при морских гравиметрических исследованиях) широко применяются кварцевые Г1)авиметры, содержащие помещенный в демпфирующую жидкость горизонтальный маятник, датчик смешения маятника, регистрирующее устройство LI .
Аппаратурная точность такого типа гравиметров за последнее время значительно повысилась. Однако из-за больщого уровня знакопеременных вертикальных ускорений, а также из-за взаимного влияния вертикальных и горизонтальных ускорений, приводящих к появлению систематической поправки, называемой поправкой СС, реализовать эту точность на практике не удается.
Для уменьшения величины поправки СС наблюдения обычно ведутся либо гравиметро со спаренной чувствительной системой, либо
двумя гравиметгями, маятники KOTopf-ix pfiaвеонуты ОД1Ш относительно другого на 180. В этом случае если 1тараметры чувствительныхсистем вдектич.чы, тосуммарное кхпоказание будет свободно от поправки СС . Однако создать совершенно 1щентичные ма Тники практически невазможно, поэтому полностью избавиться от поправки СС таким путем не удается. Остаточное впияние ее оп- (геделить невозможно.
Кроме того, при морских гравиметрически измерениях, чтобы избавиться от влияния знакопеременных ускорений, приходится осреднять показания гравиметра в 10-20 -мгаутном 1штервале , считая в этом временном интервале величш1у силы тяжести постоянной, Учитывая быстроходность современных судов и возможность Y a6oTbi в аномальных зонах, такие допущения-не всегда можно оправдать.
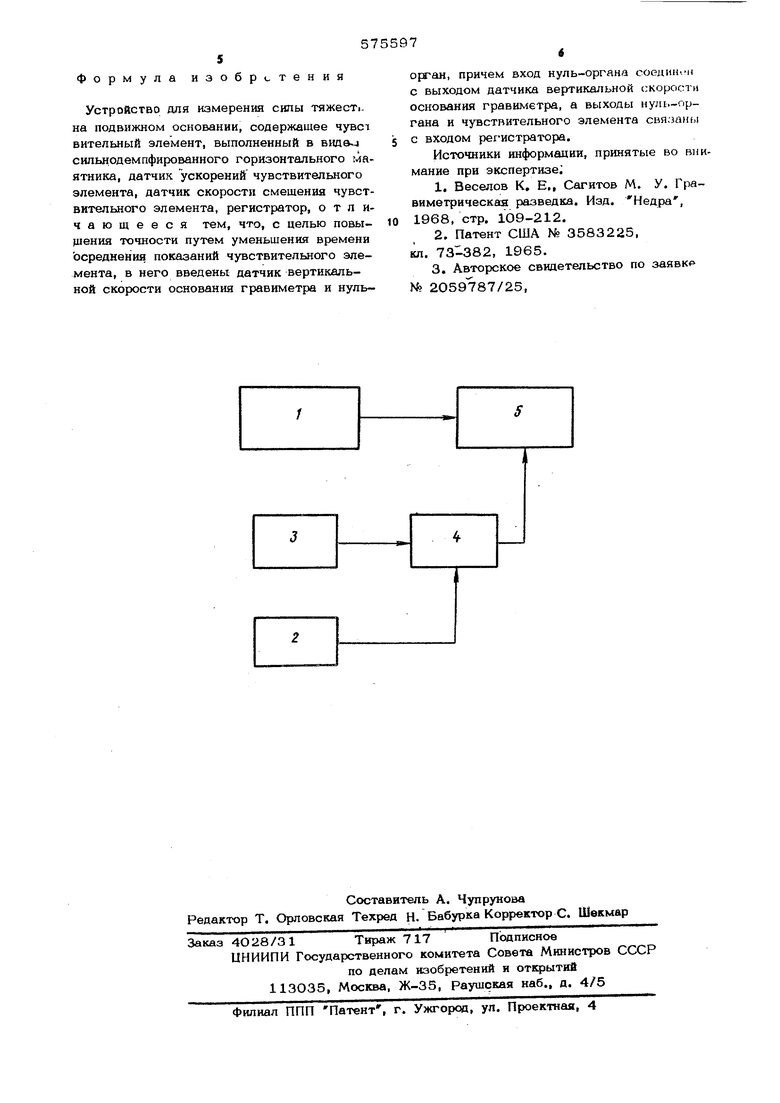
Извест51ы также морские гравиметры с метаппическим чувствительным эпементом, содержащие горизонтальный маятник, подвещенный с помощью упругого подвеса, устройство ступенчатого демпфирования, датчик смещения маятника, регистратор 2 , При высокой аппаратурной точности этим приборам также присущи перечисленные недостатки. Наиболее близким техническим решением к предложенному является гравиметр, который помимо горизонтального маятника, датчика j ускорения маятника, регистрирующего устройства, содержит датчик I скорости смещения маятника и блок экстремальных значений З . С помощью этогб прибора можно получить значения силы тяжести за небольшие интерватш I осреднения. Однако изготовление чувствительных систем такого типа встречает ряд трудностей fexHonorH4ecKoro характера, например установка гальванометрической катушки и подвод к ней проводов. В ряде приборов, таких как ГАЛ, установка датчика скорости чувствительного элемента практически невозможна из-за малого объема, занимаемого чувствительным элементом. Цель изобретения - повышение точности за счет уменьшения времени осреднения показаний чувствительного элемента. Указанная цель достигается тем, что в гравиметр с сильнодемпфироваиным маятником введены датчик вертикальной скорости основания гравиметра и нуль-фган, причем вход нуяь-органа соединен с выходом датчи ка вертикальной скорости основания гравиметра, а выходы :нуль-органа и чувствитель ного элемента связаны с вхолом регистратора. Известно, что показания сильнодемпфиро ванного маятника характеризуются сдвигом фазы по отношению к вынужденной сипе, близким 5Г /2. Отсюда следует, что в моме ты максимальных значений вертикальных ускорений их впияние напоказания чувствительной системы (маятника) близко к нулю а скорость движения маятника максимальна В эти моменты времени маятник проходит поло жение равновесия. В эти же моменты времени вертикальная скорость движения основания гравиметра бпиака к нупю. Из теории измерений на подвижном осно вании известно, что в моменты времени, когда сипьнодемпфированный маятник прохо дит через положение равновесия, соответст вующее тому, которое он принимает под де ствием силы тяжести, поправка, обусловлен ная взаимным влиянием вертикальных и гор зонтальных ускорений, {эавна нулю. Кроме т го, в эти моменты влияние вертикальных ускорений и скорость движения основания г виметра также близки к нулю. Таким образом, чтобы получить показания сильнодемпфированного маятника, свобо ные от поправки СС и вертикальных уско рений, необходимо, чтобы на гиростабилизированной платформе рядом с грави етром был установлен прибор, измеряющий либо скорость вертикального перемещения основания гравиметра, либо вертикальные ускорения. Необходимо также брать отсчеть1 с гравиметра в моменты времени, когда показадия вертикального акселерометра максимальны а показатели датчика вертикальной скорости основания гравиметра равны нулю, В нашем случае можно использоватъ либо вертикальный акселерометр, либо датчик скорости вертикального перемещения основания гравиметра, либо использовать их одновременно. В последнем случае повышается надежность и точность измерений. На чертеже показана функциональная схема предложенного устройства, включающая чувствительную систему гравиметра с сильнодемпфированным маятником 1, датчик 2 вертикального ускорения чувствительного элемента, датчик 3 вертикальной скорости оснобания гравиметра, нуль-орган. 4, регистрирующее устройство 5. При использовании в устройстве вертикального акселерометра и блока экстремальных значений необходимо в блок-схеме заменить датчик вертикальной скорости основания гравиметра. Принцип работы устройства заключается в следующем. В процессе измерения сигналы от датчика 3 вертикальной скорости поступают в нуль-орган 4 и в моменты времени, когда показания датчика вертикальной скорости равны нулю , с нуль-органа-по дается импульс или команда на регистрирующее устройство 5, которое записывает показания чувствительного элемента гравиметра. Запись -гравиметра может быть дискретной, если она производится только в те моменты времени, когда показания вертикального акселерометра максимальны (или показания датчика вертикальной скорости равны нулю), но может быть и непрерывной. В последнем случае на записи указанные моменты времени необходимо отличать какимилибо отметками, например импульсами. Применение в существующих гравиметрах устройства для измерения силы тяжести на подвижном .основании позволит повысить не только точность гравиметрических измерений, но и их производительность и детальность. Это достигается за счет уменьшения времени осреднения показаний гравиметра, а также за счет исключения из показаний гравиметра систематической поправки, обусловленной влиянием вертикальных ускорений и взаимным влиянием горизонтальных и вертикальных ускорений (поправки СС).
Формула изобретения
Устройство для измерения сипы тяжест.. на подвижном основании, содержащее чувст вительный элемент, выполненный в видв-i сильчодемпфирюванного горизонтального маятника, датчик ускорений чувствительного элемента, датчик скорости смещения чувствительного элемента, регистратор, отличающееся тем, что, с целью повышения точности путем уменьшения времени осреднения показаний чувствительного элемента, в него введены датчик вертикальной скорости основания гравиметра и нульорган, причем вход нуль-органа соелнн и с выходом датчика вертика/шной скорости основания гравиметра, а выходы ny/u,-opгана и чувствительного элемента связаны с входом регистратора.
Источники информации, принятые во внимание при экспертизе
1.Веселов К, Е., Сагитов М. У. Гравиметрическая разведка. Изд. Недра, 1968, стр. 1О9-212.
2.Патент США № 3583225, кл. 73-382, 1965.
3.Авторское свидетельство по заявка
№ 2059787/25,

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения ускорения силы тяжести на подвижном основании | 1981 |
|
SU1000983A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| СТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ В МОРЕ | 2009 |
|
RU2441260C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
