1
Изобретение быть использоваио в системах многодвигательпого электропривода поточных линий текстильно-отделочного производства.
По основному авт. св. jV° 560311 известен многодвигательный электропривод постоянного тока для обработки в процессе перемещения гибкого деформируемого материала, преимупгественпо ткани, содержащий несколько пар электродвигателей с последовательным соединением якорных цепей, подключенных к общему источиику питания; каждая иара двигателей снабжена общим и автономными регуляторами скорости, ко входу которых подключены выходы соответствующих датчиков натяжения ткани, причем датчики натяжения, расположенные между транспортирующими оргаиами, приводимыми соответствующей парой двигателей (внутри двухдвигательиой секции), воздействуют на автономные регуляторы скорости соответствующих двухдвигательных секций.
Известный многодвигательный электропривод может быть значительно упрощен, если в качестве общпх и автономных регуляторов скорости вместо магнитных усилителей использовать обычные реостаты, непосредственно связанные с соответствующими датчиками иатяжения. Однако в этом случае нельзя использовать задатчики натяжения, что снижает точность поддержания требуемого патяжения ткани в зонах машины.
Для повышения точности заданного натяжеппя ткани предлагаемый электропривод снабжен задатчиками, каждый из которых представляет собой кулачковую муфту, одна полопип;. Koiopoii несет контроля натяжения и соединена с выходом соответствуloritcro датчика натяжения, а )угая нолумуфта с :- ад;11О 11. стрелке) с г хоДОМ рСГуЛЯЮрО СКОрОСТ С(Ю -iieTCTI yЮ1 ;еЙ
пары двигатс; сГ.
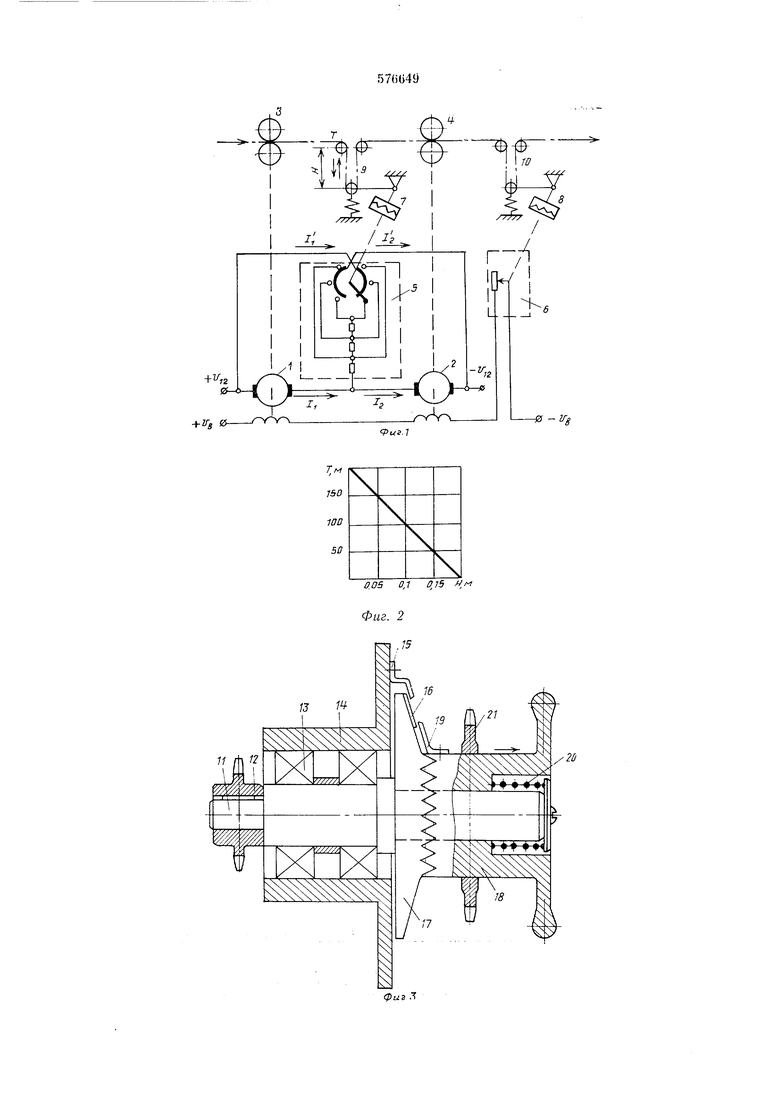
Ila фиг. 1 схема электропривода (для одной секц 1роизводственной ,1апип1ы); на фнг. 2 -- характер 1стпка датчнка натяже111;я на ф1П 3 -- конструктивная схема задатмика натяження ткани.
Электропр 1под (см. d)U Г) 5ключаст в себя два Д В гате;:я 1 и 2 )) тока, приводящих механизмы 3 и 4, тра1 С Юртирующпе ткань с натяжением Т. Параллс.-ыю 1риводным двигателям гшдклюпеи автономный регулятор 5 скорости, а обни1Й регу:1ятор G скорости включен последовательг.о с обмотками возбуждения дв 1гателсГ1. регуляторо 5 и 6 скорости через задат11 ч 7 и 8 с выходами датч 1ко1з 9 и 10 иагяжен.я.
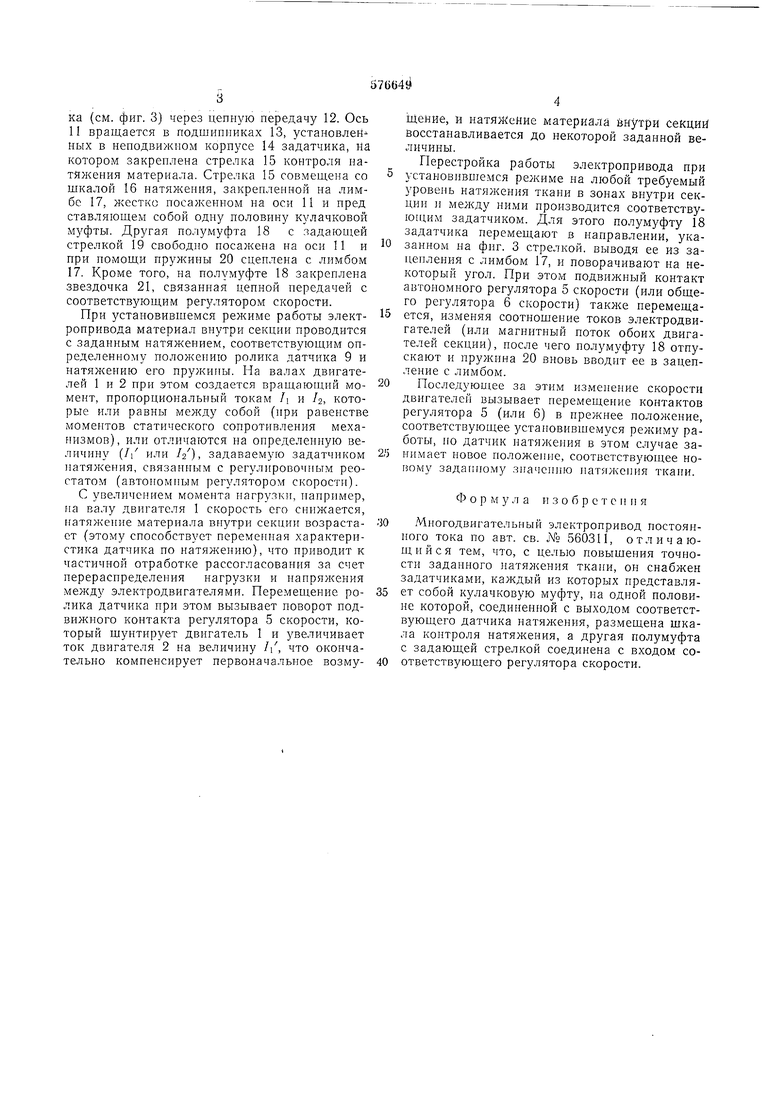
Выходной вал каждого датчика 1 атяження связан с осью 11 соответствующего задатчпка (сМ. фиг. 3) через цепную передачу 12. Ось II вращается в подшипниках 13, установлейных в неподвижном корпусе 14 задатчика, на котором закренлена стрелка 15 контроля натяжения материала. Стрелка 15 совмещена со шкалой 16 натяжения, закрепленной на лимбе 17, жестко посаженном на оси II и пред ставляющем собой одну половину кулачковой мзфты. Другая полумуфта 18 с задающей стрелкой 19 свободно посажена на оси II и при помощи пружины 20 сцеплена с лимбом 17. Кроме того, на полумуфте 18 закренлена звездочка 21, связанная цепной передачей с соответствующим регулятором скорости.
При установивщемся режиме работы электроиривода материал внутри секции проводится с заданным натяжением, соответствующим определенному положению ролика датчика 9 и натяжению его пружины. lia валах двигателей 1 и 2 при этом создается вращающий момент, пропорциоиальный токам и /2, которые или равны между собой (ири равенстве моментов статического сонротивления механизмов), или отличаются на оиределенную величину (// или /2), задаваемую задатчиком натяжения, связанным с регулировочным реостатом (автономным регулятором скоростн).
С увеличением момента нагрузки, иапрнмер, на валу двигателя 1 СЕчорость его сннжается, натяжение материала внутри секции возрастаот (этому способствует переменная характеристика датчика по натяжению), что приводит к частичной отработке рассогласования за счет иерераснределення нагрузки и нанряжения между электродвигателями. Перемещеиие ролика датчика нри этом вызывает новорот подвижного контакта регулятора 5 скорости, который щуитирует двигатель 1 и увеличивает ток двигателя 2 на величину //, что окончательно компенсирует первоначальиое возмуЩение, и натяЖеНие материала внутри секций восстанавливается до некоторой заданной величины.
Перестройка работы электропривода ири установившемся режиме на любой требуемый уровень натяжения ткани в зонах внутри секции и меледу ними производится соответствуюндим задатчиком. Для этого полумуфту 18 задатчика перемещают в направлении, указанном иа фиг. 3 стрелкой, выводя ее из зацепления с лимбом 17, и поворачивают на некоторый угол. При этом подвижный контакт автономного регулятора 5 скорости (или общего регулятора 6 скорости) перемещается, изменяя соотношение токов электродвигателей (или магнитный поток обоих двигателей секции), после чего полумуфту 18 отпускают и пружина 20 вновь вводит ее в зацепление с лимбом.
Последующее за этим изменение скорости двигателей вызывает перемещение контактов регулятора 5 (или 6) в прежнее положение, соответствующее установивщемуся режиму работы, но датчик натяжения в этом случае занимает новое положение, соответствующее новому заданному значсн но натяжения ткани.
Фор м у л а и 3 о б р е т с н и я
Многодвигательный электропривод постоянного тока по авт. св. № 560311, отличающийся тем, что, с целью повыщения точности заданного натяжения ткани, он снабжен задатчиками, каждый из которых представляет собой кулачковую муфту, иа одной половине которой, соединенной с выходом соответствующего датчика натяжения, размещена шкала контроля натяжения, а другая полумуфта с задающей стрелкой соединена с входом соответствующего регулятора скорости.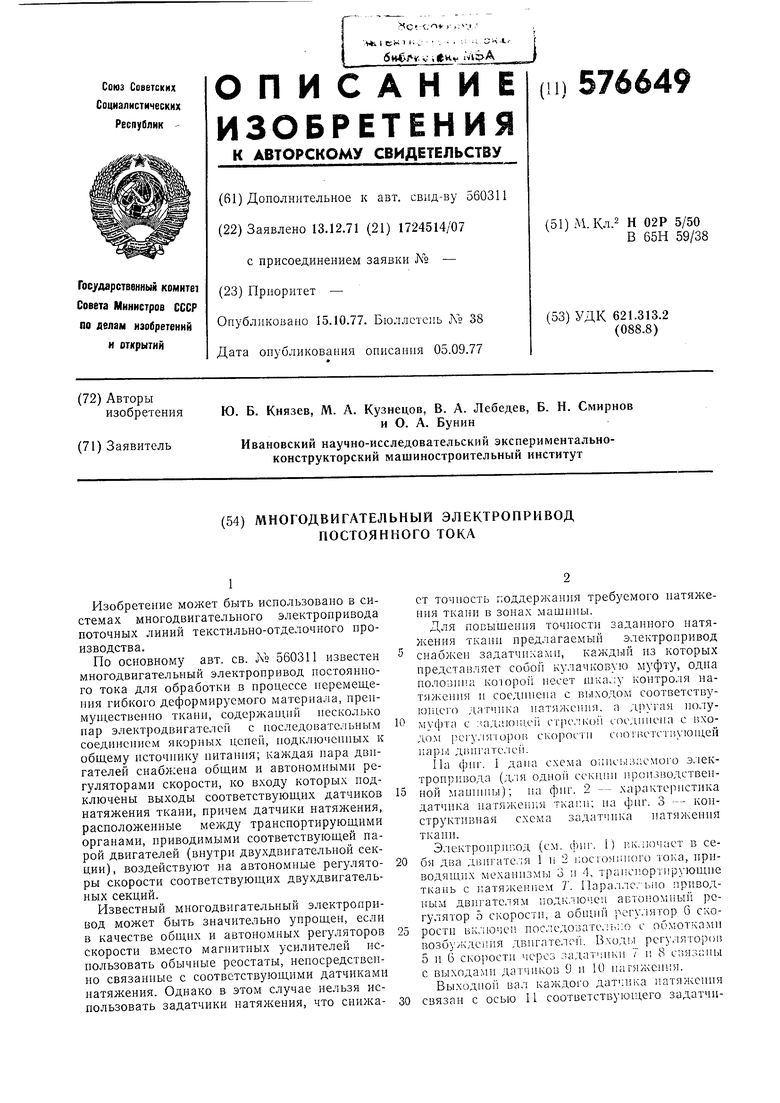
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод постоянного тока | 1969 |
|
SU560311A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство для управления многодвигательным электроприводом тянущей станции | 1977 |
|
SU743151A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |