В случае, когда тянущая станциябазовый механизм на участке, с.ммарная нагрузка электродвигателей роликов определяется знаком и величиной разности натяжений в полосе на входе и на выходе т.е, при изменении условий работы двигатели роликов тяиугцей станции могут переходить из двигательного режима в генераторный и наоборот. При этом изменяется направление увеличения натяжения и, в соответствии с изложенным, необходимо измен,ять распределение загрузки электродвигателей для сохранения условий отсутствия буксования.
Известно аналогичное устройство в котором используют лкфференциалы с вспомогательными электродвигателя-ми, что значительно усложняет и консрукцию механизма и систему управления, снижает надежность меканическог и электрического оборудования 1.
Известны устройства для управлени многодвигательньдал электроприводом, ршающие задачу обеспечения заданного соотношения скоростей или усилий нескольких электродвигателей технологической линии с помощью сдвоенного (два механически связанных) потенциометра 2 и 3, Коэффициент передач потенциометра является величиной постоянной, не зависящей от величины и полярности приложенного напряжения, поэтому эти устройства не могут решить задачу изменения величины сигнала за,дания скорости (тока) при ;:зменении полярности сигнала управ.пеНИН, что необходимо при изменении тенологического режима работы станции (переход двигателей из двигательчого режима работы в генераторный или ка.оборот) .
Наиболее близким к предлагаемому является устройство, в котором каждый электродвигатель снабжен индивидуальным источником питани.я и регулятором тока, а кроме того имеется общий регулятор напряжения с обратной связью по напряжению одного из двигателей, выдающий задание всем подчиненным ему параллельно регулятора л тока. Такая система управления решает задачу выравнивания или равномерного , распределения загрузки между двигателями тянущей станции, но не обеспечивает неравномерного распределения загрузки между электродвигателями роликов и не может изменять закон распределения загрузки между элект одвигателями роликов тянущей станции при смене режима работы последней 4 ,
Целью изобретения является повышение надежности установки в работе и повьошение качества обрабатЕ ваемого материала путем обеспечения заданног распределения нагрузки между электродвигателями многодвигательного электропривода тянущей станции при осуществлении любого требуемого технологией режима работы механизма.
Это достигается тем, что в устройство для управления многодвигательны электроприводом, содержащее индивидуальные источники питаЕ-гия электродвгателей, регулятор скорости с подключенным к его входу датчиком скорости одного из электродвигателей и задатчиком скорости, и индивидуальные регуляторы тока, входы каждого из которых соединены с датчиками тока электродвигателей, а выходы - с управляющими входами упомянутых источников питания, введены нелинейные элементы с характеристикой, изменяквдей коэффициент передачи при изменении знака входного сигнала, включенные между регулятором скорости и регуляторами тока каждого из электродвигателей .
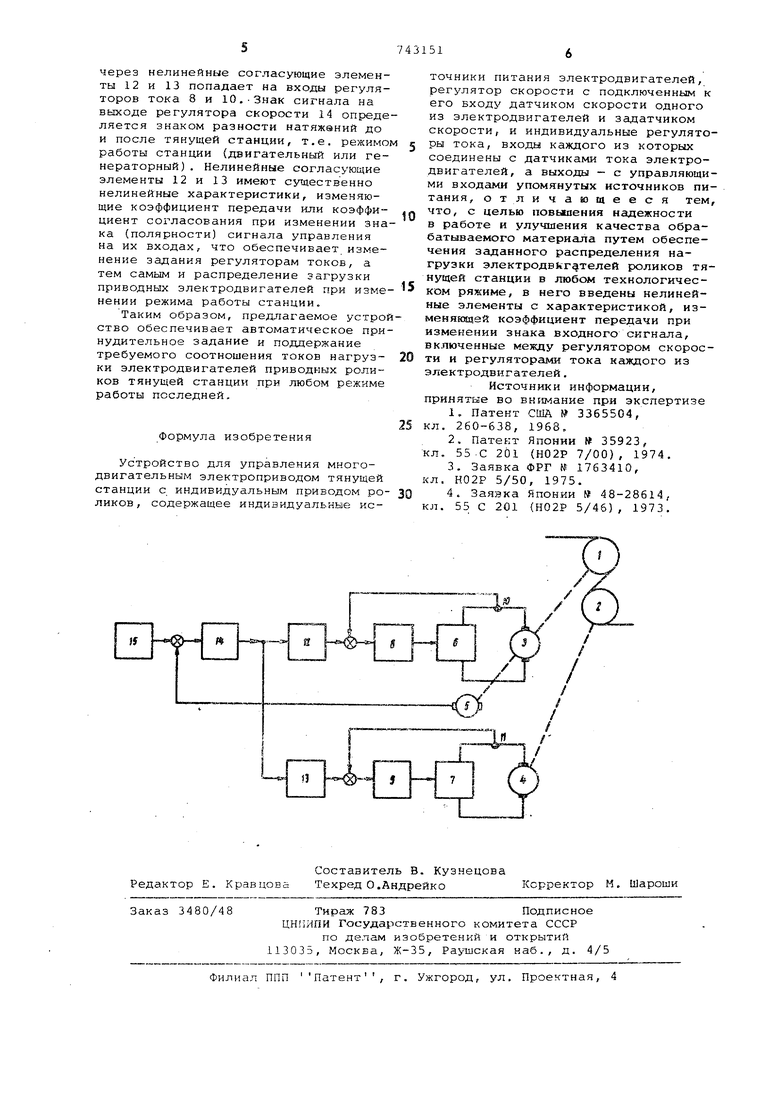
На чертеже приведена функциональная схема устройства применительно к двухдЕигательному электроприводу.
Ролики 1 и 2 тянущей станции соедкнег.ы механическ; с приводными электродвигателями постоянного тока 3 и 4„ Электродвигатель 3 механически соединен с датчиком 5 скорости вращения (тахогенератором). Якори электродвигателей 3 и 4 подключены к регулируемым индивидуальным источникам литания 6 и 7, в качестве которых .vioryT быть использованы генераторьз постоянного тока, ионные или тиристорные преобразователи с системами импульсно-фазового управления или другие устройства. Входы источников питания б к 7 подключены к выходам регуляторов тока 8 и 9, входы каждого из которых соединены: один - с выходом датчика тока нагрузки 10 и 11 соотзетствующего приводного электродвигателя, а другой - с выходом соответствующего нелинейного согласующего элемента 12 или 13. ВхОды нелинейных согласующих элементов 12 и 13 подключены к выходу регулятора скорости 14, входы которого присоединены: один к датчику скорости 5, а другой - к задатчику скорости 15.
Работает устройство следующим образом.
В рабочем р§жиме при наличии сигнала на выходе задатчика скорости 15 при отсутствии токов нагрузки электродвигателей (идеальный холостой ход регулятор скорости 14 обеспечивает одинаковые скорости вращения приводных электродвигателей 3 и 4. Появление разкости натяжений в полосе пере и за тянущей станцией приводит к появлению токов нагрузки двигателей 3 и 4, что вызывает изменение их скоростей и, следовательно, изменение величины сигнала на выходе тахогенератора 5. В результате на выходе регулятора скорости 14 появляется общи сигнал задания тока нагрузки, которы через нелинейные согласующие элементы 12 и 13 попадает на входы регуляторов тока 8 и 10,-Знак сигнала на выходе регулятора скорости 14 опреде ляется знаком разности натяжений до и после тянущей станции, т.е. режимо работы станции (двигательный или генераторный) . Нелинейные согласующие элементы 12 и 13 имеют сутцественно нелинейные характеристики, изменяющие коэффициент передачи или коэффициент согласования при изменении зна ка (полярности) сигнала управления на их входах, что обеспечивает изменение задания регуляторам токов, а тем самым и распределение загрузки приводных электродвигателей при изме нении режима работы станции. Таким образом, предлагаемое устро ство обеспечивает автоматическое при нудительное задание и поддержание требуемого соотношения токов нагрузки электродвигателей приводных роликов тянущей станции при любом режиме работы последней. Формула изобретения Устройство для управления многодвигательным электроприводом тянущей станции с индивидуальным приводом ро ликов, содержащее индивидуальные источники питания электродвигателей, регулятор скорости с подключенным к его входу датчиком скорости одного из электродвигателей и задатчиком скорости, и индивидуальные регуляторы тока, входы каждого из которых соединены с датчиками тока электродвигателей, а выходы - с управляющими входами упомянутых источников питания, от л и чающееся тем, что, с целью повышения иадежности в работе и улучшения качества обрабатываемого материала путем обеспечения заданного распределения нагрузки электродвигателей роликов тянущей станции в любом технологическом ряжиме, в него введены нелинейные элементы с характеристикой, изменякяцей коэффициент передачи при изменении знака входного сигнала, включенные меяоду регулятором скорости и регуляторами тока каждого из электродвигателей. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3365504, 260-638, 1968. 2.Патент Японии 35923, кл. 55 С 201 (Н02Р 7/00), 1974. 3.Заявка ФРГ № 1763410, кл. Н02Р 5/50, 1975. 4.Заявка Японии № 48-28614, кл. 55 С 201 {Н02Р 5/46), 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многодвигательным электроприводом многороликового натяжного механизма | 1978 |
|
SU758457A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод | 1985 |
|
SU1348979A1 |
| Устройство для управления электроприводом натяжного механизма | 1975 |
|
SU560312A1 |
| Многодвигательный электропривод | 1977 |
|
SU828354A1 |
| Многодвигательный электропривод | 1980 |
|
SU928581A1 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Устройство для управления многодвигательным электроприводом механизма передвижения роторного экскаватора | 1987 |
|
SU1465932A1 |
