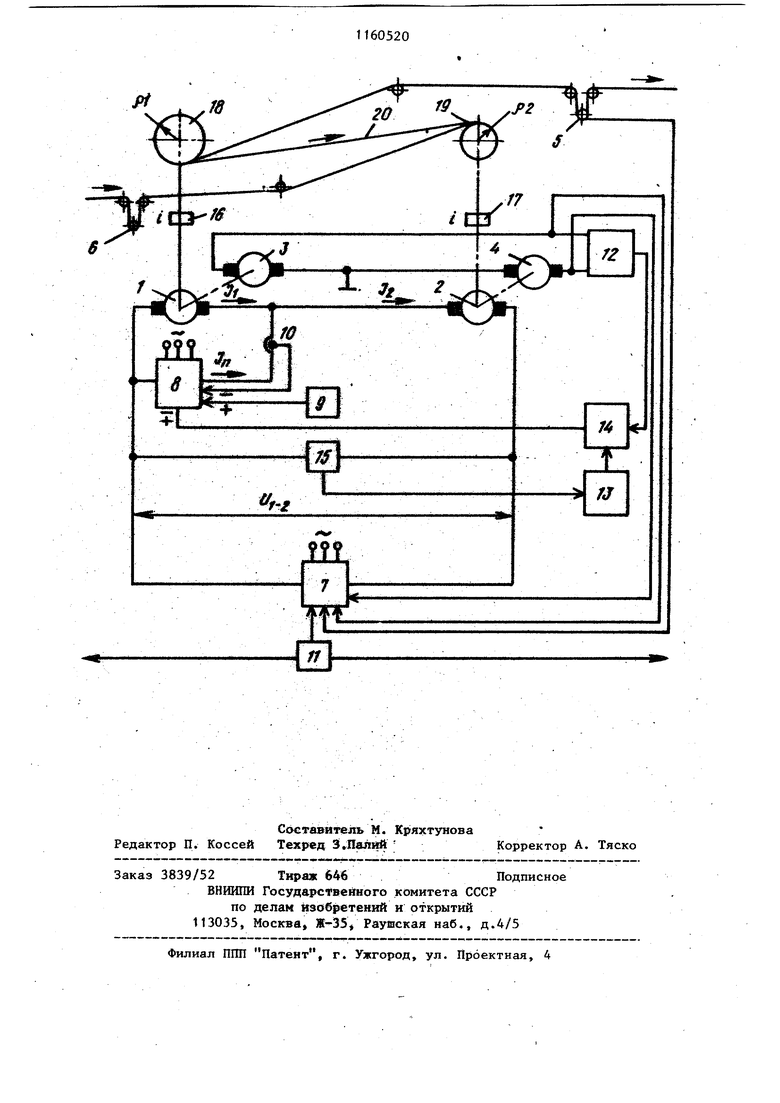
Изобретение относится к электротехнике и может быть использовано в текстильной промьшшенности в системах многодвигательного электропривода поточных линий с перематывающим механизмом для обработки гибкого деформируемого материала. Известен многодвигательный электропривод постоянного тока для обработки в процессе перемещения ги кого деформируемого материала, содержащий несколько пар электродвигателей с последовательным соединением якорных цепей подключенных к общему источнику питания, датчики натяжения перемещаемого материала, каждый из которьйс воздействует на регулятор скорости одной из пар дви гателей, к обмоткам возбуждения которых подключены выхода регуляторов скорости дополнительные регуляторы скорости по числу приводных двигате лей, каждый из которых подключен параллельно относящемуся к нему двигателю, причем к. входу каждого из дополнительных регуляторов подключены выходы дополнительных датчиков натяжения, каждый из которых расположен между транспортирующими органами, приводными соответствующей парой двигателей 03 Недостатками электропривода являются невысокая точность поддержания натяжения обрабатьшаемого матер ала и необходимость установки датчи ка петли или датчика натяжения, что возможно не в любых механизмах поточной линии. Наиболее близким технический решением к изобретению является мно годвигательный электропривод постоянного тока для поточной линиис перематьшающим механизмом, содержащий электродвигатели постоянного тока, объединенные в дифференхщальную ячейку, связанные сдатчиками скорости датчики натяжения, один из которых связан с общим преобразователем напряжения, подключенНью к якорНым обмотк&м электродвигателе регулятор тока подпитки, подключанный к якорным обмоткам электродв гателей, один вход которого соедине с задатчиком тока подпитки, а другой с датчиком тока подпитки, задатчик скорости, соединенный- с общим преобразователем напряжения 23 . Недостатком извес.тного многодвигательного электропривода является невысокая точность поддержания натяжения обрабатываемого материала при изменении, скорости его проводки в случае неравенства радиусов намотки материала на ролики перематьтающего механизма. Объясняется это тем, что при изменении скорости проводки материала, например при ее увеличении, растет напряжение с выхода общего преобразователя и, поскольку ток подпитки остается постоянным в этом режиме, увеличиваются динамические токи двигателей а следовательно, и их моменты, что приводит к росту натяжения обрабатываемого материала при неравенстве радиусов намотки материала на Ьодающий и наматьшающий ролики перематьшающего механизма. Целью изобретения я:вляется повышение точности поддержания натяжения обрабатываемого материала. Поставленная цель достигается тем, что в многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом содержащий электродвигатели постоянного тока, объединенные в дифференциальную ячейку, связанные с датчиками скорости датчики натяжения, один из которых связан с общим преоб- разователем напряжения, подключенным к якорным обмоткам электродвигателей, гулятрр тока подпитки, подключенньй к якорным обмоткам электродвигателей, один вход которого соединен с задатчиком тока подпитки, а другой - с датчиком тока подпитки, задатчик скорости, сое динейНЁЙ с общим преобразователем напряжения, дополнительно введены сумматор), корректирующий блок, блок перемножения и датчик напряжения общего преобразователя напряжения, причем выход датчика напряжения через корректирующий блок подключен к одному входу блока перемножения, к другому входу которого подключен выход сумматора, входами соединенного с датчиками скорости, а выход блока перемножения соединен с регулятором тока подпитки. fia чертеже представлена схема электропривода. Нногодвигательный электропривод содержит электродвигатели 1 и 2, объединенные в дифференциальную {ячейку, связанные с датчиками 3 и 4 3 скорости, датчики 5 и 6 натяжения, один из которых связан с общим преобразователем 7 напряжения, подключенным к якорным обмоткам электродвигателей 1 и 2, регулятор 8 тока подпитки, подключенный к якорным . обмоткам электродвигателей 1 и 2, один вход которого соединен с задат чиком 9 тока подпитки, а другой - с датчиком 10 тока подпитки, задатчик 11 скорости, соединенный с преобразователем 7 напряжения. Кроме того, многодвигательный электропривод содержит сумматор 12,корректирующий блок 13, блок 14 перемножения и датчик 15 напряжения преобразователя 7 напряжения, выход датчика 15 напряжения через корректир ощий блок 13 подключен к одному входу блока 14 перемножения, к втор му входу которого подключен выход сумматора 12, входами соединенный, с датчиками 3 и .4 скорости, а вькод блока 14 перемножения соединен с ре гулятором 8 тока подпитки. Электродв«п атели 1 и 2 соединены через редуктор 16 и 17 с поданндим и наматьшакицим роликами 18 и 19, на которые периодически наматьшают и сматывают обрабатываемый материал 2 Многодвигательный электропривод работает следующим образом. В установившемся режиме работы материал 20 с подающего, ролика 18 перематывается на наматъшающий ролик 19 с постоянным натяжением, устанавливаемым задатчиком 9 тока подпитки.. Дифференциальный электропривод обладает возможностью силового согласования скоростей без применения непосредственных измерителей натяжения., являясь статическим регулятором косвенного действия, компенси рующ1 1 изменения натяжения проводимого материала. Компенсация технологических возмущений в дифференциальном электроприводе возможна при портоянстве то ка подпитки, величина которого устанавливается задатчикон 9 тока подпитки и поддерживается постоянно за счет охвата регулятора 8 toKa .по питки отрицательной о братной связью с датчика 10 тока подпитки. Скорость перемотки материала регулируется изменением напряжения 1) с выхода общего преобразователя 7 204 напряжения. Величина скорости устанавливается задатчиком 11 скорости, общим ,для всей линии, и поддерживается постоянной за счет отрицательной обратной связи по сумме частот вращения электродвигателей 1 и 2 с датчиков 3 и 4 скорости. При изменении уровня скорости (сигнала с выхода задатчика 11 скорости) или сигнала с датчика 5 натяжения изменяется напряжение U на выходе общего преобразователя нап ряжения 7, происходит изменение динамических токов электродвигателей 1 и 2 и их угловых ускорений на одинаковую величину, приводящее в . неравенства радиусов намотки к изменению на различную величину линейных ускорений роликов 18 и 19 и, как следствие - изменению натяжения материала в зоне между роликами 18 и 19 перематывающего механизма, поскольку ток подпитки остается постоянным. В случае равенст- вз радиусов намотки линейные ускорения изменяются на одинаковую величину, и отклонения натяжения от заданного не происходит. Таким образом, схема дифференциального электропривода с одной обратной св.язью по току подпитки, обеспечивая постоянство натяжения при технологических возмущениях, не обеспечивает постоянства натяжения при изменении скорости проводки материала и радиусов намотки. Для поддержания натяжения постоянным в этих режимах необходимо изменение тока подпитки при изменении скорости проводки материала в зависимости от соотношения величин радиусов намотки, компенсирующее изменение TOJCOB двигателей. Дл.я этого в электроприводе напряжение U с выхода общего преобразователя 7 напряжения, определяющее уровень скорости провo и материала, через датчик 15 напряжения и блок 13 коррекции поступает на блок 14 перемножения. На другой вход блока 14 перемножения заводится сигнал, пропорциональный разнице радиусов намотки. Таким образом, на выходе блока 14 перемножения получаем сигнал, поступающий далее на регулятор 8 тока подпитки, позволяющий изменением величины тока подпитки компенсировать изменения токов двигателей при изменении
. S
скорости проводки материала и радиусов намотки. Введение данной обратной связи ликвидирует неточность силового согласования скоростей и компенсирует изменения натяжения материала при изменении скорости провод ки материала и радиусов намотки.
При увеличении скорости проводки материала сигнал, поступающий с выхода задатчика 11 скорости увеличива ется, в результате чего возрастает разность между напряжением задания скорости и напряжением обратной связи по сумме скоростей электродвигателей 1 и 2. Последняя вызьшает увеличение сигнала с выхода общего преобразователя 17 напряжения, что приводит к резкому увеличению сигнала на выходе корректирующего блока 14, величина которого пропорциональна темпу роста.
В случае перемотки материала с подающего ролика 18 на наматывающий ролик 19 при V гле f и р радиусы намотки сигнал с выхода кор ректирующего блока 13 умножается блоком 14 перемножения на положитель-. ный сигнал с сумматора 12. На выходе блока 14 перемножения возникает положительный сигнал, приводящий к увеличению тока подпитки, а следовательно, и уменьшению тока 1 и частоты вращения (о, электродйигателя 1 с большим MC, т.е. линейные ско рости роликов 18 и 19 перематывающего механизма выравниваются и натяжение остается постоянным.При .
60520
устройство работает аналогично. Сигнал с выхода корректируклцего блока 13 умножается блоком 14 и отрицатель ный сигнал с выхода сумматора 12, 5 что приводит к резкому уменьшению тока подпитки, а следовательно, к увеличению тока I-f и частоты вращения М электродвигателя 1 с меньшим моментом статического сопротивления на валу. В результате линейные скор|ости роликов 18 и 19 перематьшающе1 о механизма выравниваются .и натяжение остается постоянным.
В случае равенства радиусов намотки сигнал данной обратной связи равен нулю, поскольку с выхода сумматора 12 сигнал также равен нулю.
Коррекция по и, должна быть упреждающей, чтобы ток подпитки 1ц изменялся одновременно с напряжением и общего преобразователя 7 напряжения, т.е. в качестве коррекции может быть использован дифференцирующий блок с передаточной функцией..
Таким образом, в многодвигательном электроприводе поточной линии с перематЬюающим механизмом обеспечивается повьшенная точность стабилизации натяжения обрабатьтаемого материала за счет .введения на управляющий вход регулятора тока подпитки через блоки перемножения, коррекции и сумматор обратных связей по напряжению общего преобразователя напряжения и разности частот вращения электродвигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Двухдвигательный электропривод намоточной машины | 1981 |
|
SU964944A1 |
| Электропривод перематывающего устройства | 1988 |
|
SU1578076A1 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |
| Многодвигательный электропривод агрегата непрерывной обработки полосы материала | 1986 |
|
SU1374394A1 |
| Многодвигательный электропривод непрерывно-поточного агрегата | 1983 |
|
SU1171949A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
МНОгаДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ поточней 1ШНИИ С ПЕРЕМАТЫВАЮЩИМ МЕХАНИ КМ, содержащий электродвигатели постоянного тока объединенные в дифференциальную ячейку, связаннью с датчиками скорости датчики натяжения, один из которых связан с обф1м преобразователем напряжения, подключенным к якорным обмоткам электродвигателей, регулятор тока под:питки, подколоченный к якорным обмоткам электродвигателей,,один вход которого соединен с задатчиком тока подпитки, а другой - с датчиком тока 1Ю1щкткн, задатчик скорости, соединенный с общим преобразователем напряжения, отличающийся тем, что, с целью |повш1ения точности поддержания натяжения рбрабатьшаемого материала, дополнительно введены сз мматор, корректирзгющий блок, блок перемноЖе ия и датчик напряжения общего преобразователя напряжения, причем (Л :выход датчика напряжения через кор ректирующий блок подключен к одному входу блока перемножения, к друiroMy входу которого подключен выход сумматора, входами соединенного с ,датчиками скорости, а выход блока перемножения соединен с регулятором {Тока подпитки.,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| Многодвигательный электропривод постоянного тока | 1969 |
|
SU560311A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , т - | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
