перемещениг задано двумя направлякхцими. Первоначальное сжатие пружины плавно регулируется, с помощью винта, снабженного электроприводом.
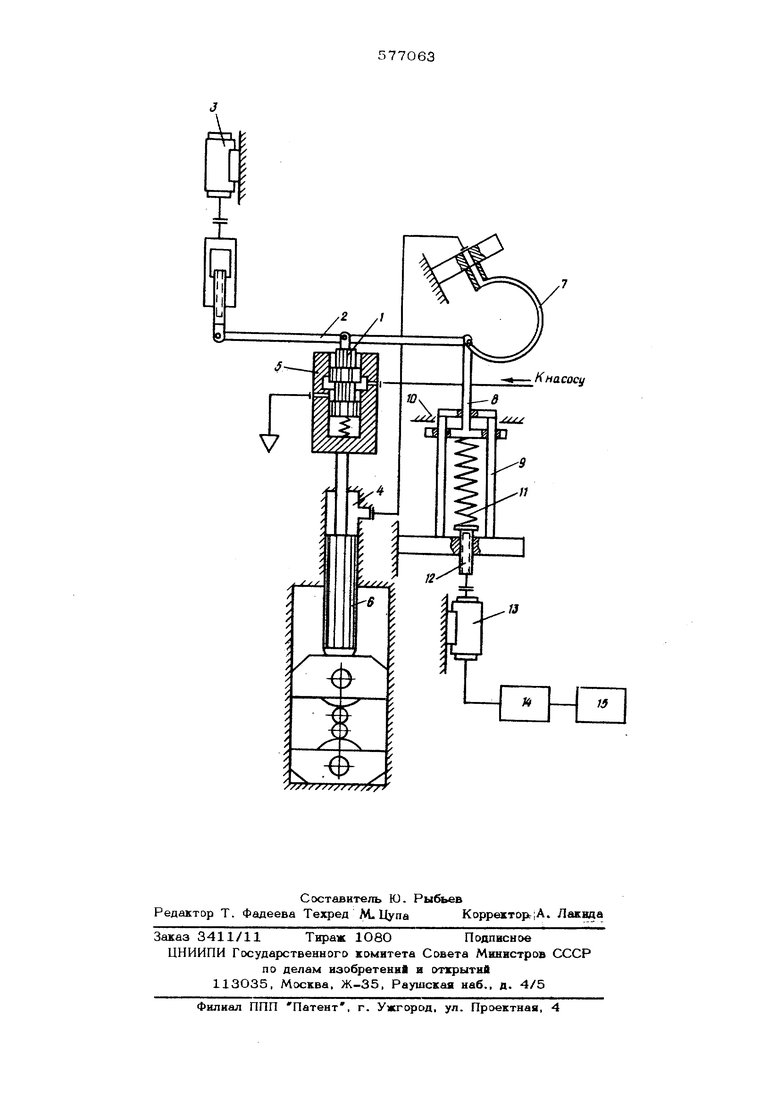
На чертеже приведена принципиальная схема предлагаемого устройства.
Устройство содержит золотник 1 следящего гидравлического привода, перемещение которого определяется перемещением плеч рычажного дифференциального устройства 2 одно иэ которых связано с шаговьал двигателем 3, а другое - с контуром поло- жнтельной обратной связи по давлению в силовом цилиндре 4. Силовой цилиндр соединен с насосом так, что давление в силовом цилиндре определяется сопротивление в щелях дросселирующего золотника, зависит от взаимного положения подвижной золотниковой втулки 5 и золотника Золотниковая втулка жестко связана с плу жером 6 силового цилиндра. Одновитковая манометрическая трубка 7 воспринимает давление в силовом цилиндре. Она связана с толкателем 8, который может передвигатся по двум вертикальным направлякйдим f Верхнее положение толкателя ограничено упором 10, фиксирующим начало отсчета деформац.ки. Снизу на толкатель воздействует механическая пружина 11, предварительно сжатая винтом 12. Винт может перемещаться с помощью электродвигателя 13 с системой управления 14 и задающим устройством 15. Толкатель связан с плечом рычажного дифференциального устройства, управляющего следящим золотником.
Устройство для компенсации деформации работает следующим образом. Заданный зазор между валками до прокатки устанавливается с помощью шагового двигателя. Необходимый коэффициент передачи контура положительной обратной связи устанавливается для проката с помощью задаю щего устройства. При наличии давления в силовом цилиндре одновитковая манометрическая трубка оказывает давление на толкатель, деформвфуя механическую пружину, на величину, пропорциональн то деформации клети. Вместе с толкателем перемещается рычаг , дифференциального устройства, которое перемещает золотник в осевом направлении на величину упругой деформации клети. Перемещение золотника вниз увеличивает сопротивление в щелях золотниковой
пары. При этом давление в силовом цилиндре возрастает, и плунжер, преодолевая вйешнее усилие, перемещается вниз на величину упругой Деформации клети. Втулка
5 золотника, жестко связанная с плунжером силового цилиндра, также перемещается на величину упругой деформации клети и открывает дроссельную щель, восстанавливая равновесие. Таким образом, влияние упру0 гой деформации клети на зазор между вал-, ками постоянно компенсируется перемещением нажимного устройства. Осцилляция в силовом гидроцилиндре при необходимости может осуществляться путем подачи импуль5 сов нужной частоты в систему управления шаговым двигателем..
Использование предложенного устройств позволит устранить значительную часть ошибки компенсации, обусловленную трени0 ем в управляющем цилиндре, а также дает возможность осуществить точную настройку коэффициента передачи контура положительной обратной связи на данную жесткость клети, которая за&исит от ширины
5 прокатываемой полосы и жесткости валков т.е. повышается точность регулирования при смене сортамента и смене валков.
Форм ул а изобретения
0Устройство для автоматической компенсации деформации клети, содержащее следящий гидравлический привод нажимного устройства с контуром положительной обратной связи по давлению в силовом цилин5 дре, отличающееся тем, что, с целью повышения точности регулирования производственного процесса, чувствительный элемент контура положительной обрат-% ной связи по давлению выполнен в виде
0 одновитковой манометрической трубки, свя. занной с полостью силового цилиндра магистралью и механически соединенной с плечом рычажного дифференциального механизма, соединенного с золотником, и тол5 кателём, верхнее положение которого ограничено упором, посредством которого фицсируют начало отсчета деформации, связан., ным с регулируемой механической пружиной.
0Источники информации, принятые во внимание при экспертизе 1,
1. Авторское свидетельство № 206257 кл. В 21 Н 37/08, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ НАЖИМНОЕ УСТРОЙСТВО ПРОКАТНОГОСТАНА | 1966 |
|
SU181030A1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
| Гидравлическая система рулевого управления шарнирно-сочлененного транспортного средства | 1978 |
|
SU765082A1 |
| Устройство для адаптивной настройкиРЕгуляТОРА ТОлщиНы пРОКАТА HA ТРЕбуЕМыйпАРАМЕТР | 1976 |
|
SU806187A1 |
| Зубошлифовальный станок | 1973 |
|
SU454100A1 |
| Устройство для автоматического регулирования давления в гидравлическом прессе | 1983 |
|
SU1133119A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ГИДРОУСИЛИТЕЛЬ | 1971 |
|
SU302500A1 |
| ПРЕСС ГИДРАВЛИЧЕСКИЙ | 1971 |
|
SU308884A1 |