Известен гидроусилитель для следящих систем управления, содержащий рычажный механизм, гидравлический цилиндр и золотниковую коробку с распределительным золотником, гидрозамком и золотипком кольцевания и обеспечивающий неоднократное механическое отключение рычага управления от гидроцилиндра без разрушения их связи при отказах гидросистемы.
Предлагаемый гидроусилитель отличается тем, что он снабжен вторым гидравлическим цилиндром и оба цилиндра выполнены дифференциальными с качающимися рычагами, захватывающими рычаг нагрузки при подаче давления в систему. Это позволяет обеспечить илавиое автоматическое включение и выключение гидроусилителя в режиме слежения.
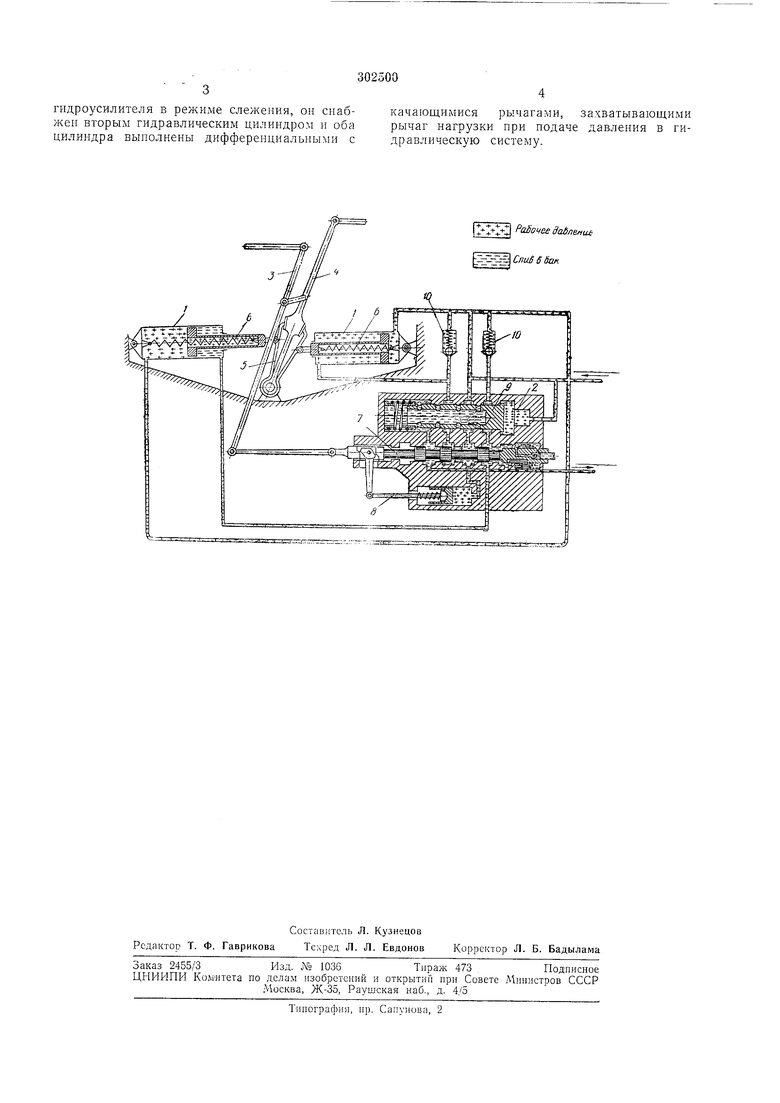
На чертеже схематически изображен предлагаемый гидроусилитель.
Он имеет дифференциальные силовые гидроцилиндры /, золотниковую коробку 2, рычаг управления 3, рычаг нагрузки 4, рычаги гидроцилиндров 5 и возвратные пружины гидроцилиидров 6. В золотниковой коробке смонтированы распределительный золотпик 7, гидрозамок 8, золотник кольцевания 9 и два щариковых клапана 10.
ник, обеспечивая иоступление жидкости в соответствующие полости гидроцилиндров. Рычаги гидроцилиндров плавно захватывают рычаг нагрузки. При падении давления в гидросистеме срабатывает гидрозамок, который фиксирует золотник в закрытом ноложении и устраняет перемещение опоры рычага управлення. Под действием пружин рычаги гидроцилиндров освобождают рычаг нагрузки. В этом случае перемещение рычага нагрузки осуществляется за счет механической связи между рычагами управления и нагрузки. Рычаги гидроцилиндров находятся в крайних положениях и на работу системы не влияют.
Как включение, так и отключение гидроусилителя от рычажной системы происходит в режиме слежения в любом положении последней.
20
Предмет изобретения
Гидроусилитель для следящих систем управления, содержащий рычажный механизм, гидравлический цилиндр и золотниковую коробку с распределительным золотником, гидрозамком и золотником кольцевания, отличающийся тем, что с целью обеснечения плавного автоматического включения и выключения
гидроусилителя в режиме слежения, ои сиабжеи вторым гидравлическим цилиндром и оба цилиндра выполнены дифференциальными с
качающимися рычагами, захватывающими рычаг иагрузки при подаче давления в гидравлическую систему.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ЗАКРЫЛКА САМОЛЕТА | 1966 |
|
SU183448A1 |
| Двухрежимный гидроусилитель | 1979 |
|
SU840515A1 |
| Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна | 1976 |
|
SU610725A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1449459A1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1977 |
|
SU1840180A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ВОДОМЕТНОГО ДВИЖИТЕЛЯ | 2022 |
|
RU2776626C1 |
| Гидравлическая система рулевого управления шарнирно-сочлененного транспортного средства | 1978 |
|
SU765082A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
Рабочее даблепче Спи б дал
