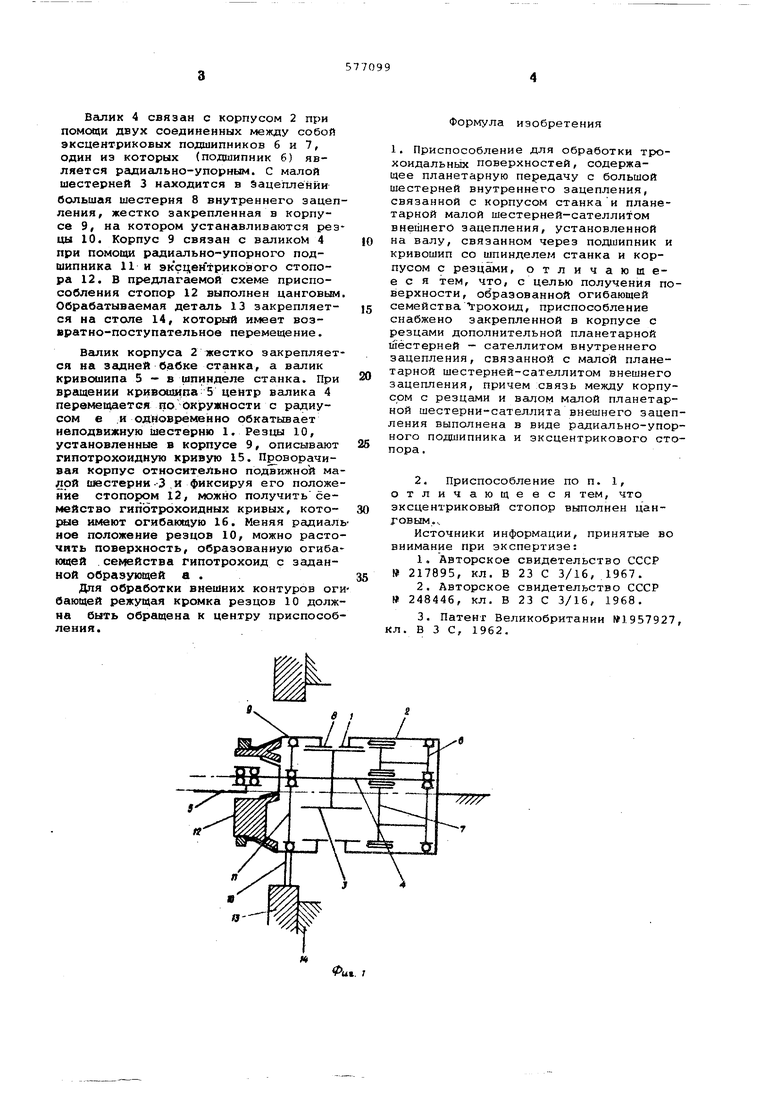
Изобретение относится к машиностроению и может быть использовано для изготовления поверхностей, выполненных во внутренней или внешней огибающих семейства трохоид без при менения копировальных устройств. Известны приспособления для обработки трохоидальных поверхностей без применения копировальных устройств l и 2 . В этих приспособлениях столу с обрабатываемой деталью или инструменту для получения трохоидальных поверхностей сообщают два вращения и возвратно-поступательное перемещение. Известны приспособления для обработки трохоидальных поверхностей содержащие планетарную передачу с большой шестерней внутреннего зацеп ления, связанной с корпусом станка и планетарной малой шестерней - сателлитом внешнего зацепления, установленной на валу, связанном через подшипник и кривошип со шпинделем станка и корпусом с резцами J.1 Однако известные приспособления не позволяют получить поверхности, образованньле огибающей семейства трохоид. Для получения поверхности, образованной огибающей семейства трохоид, предлагаемое приспособление снабжено закрепленной в корпусе с резцаИ дополнительной планетарной шестерней-сателлитом внутреннего зацепления, связанной с малой планетарной шестерней-сателлитом внешнего зацепления, причем связь между корпуссм с резцами и валом малой планетарной шестерни внешнего зацепления выполнена в виде радиально-упорного подшипника и эксцентрикового стопора. На фиг. 1 дана кинематическая схема предлагаемого устройства; на фиг. 2 показаны формы обрабатываемой поверхности. Приспособление имеет центральную шестерню 1 внутреннего зацепления, которая закреплена в корпусе 2, имеющем валик для жесткой связи с корпусом станка. Планетарная подвижная малая шестерня 3 закреплена на валике 4, который соединен при помощи кривошипа 5 со шпинделем станка. В предлагаемой схеме валик кривошипа 5 и валик 4 расположены соосно и соединены мезкду собой через подшипник.
Всшик 4 связан с корпусом 2 при помощи двух соединенных между собой эксцентриковых подшипников 6 и 7, один из которых (подшипник 6) является радиально-упорным. С малой шестерней 3 находится в Эацепленйи большая шестерня 8 внутреннего зацепления, жестко закрепленная в корпусе 9, на котором устанавливаются резцы 10. Корпус 9 связан с валиком 4 при помощи радиально-упорного подшипника Ни эксцентрикового стопора 12. В предлагаемой схеме приспособления стопор 12 выполнен цанговым. Обрабатываемая деталь 13 закрепляется на столе 14, который имеет возвратно-поступательное перемещение.
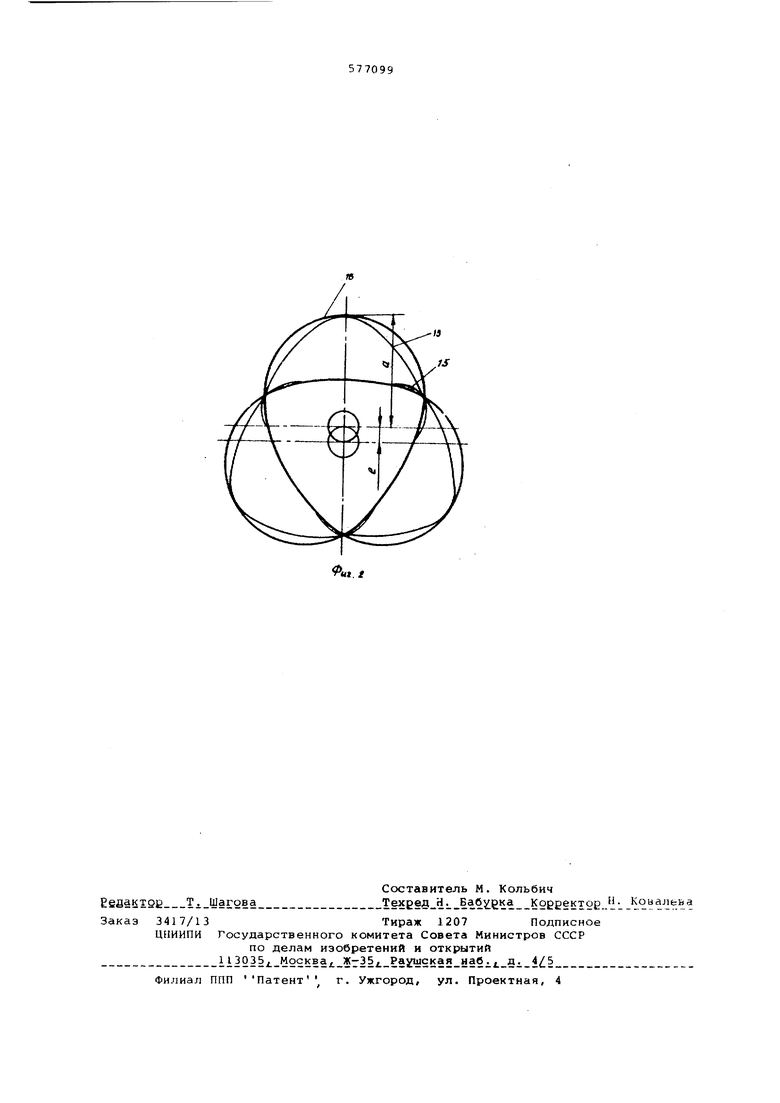
Валик корпуса 2 жестко закрепляется на задней бабке станка, а валик кривошипа 5 - в шпинделе станка. При вргицении кривсооипа 5 центр валика 4 первметдается по Окружности с радиусом е и одновременно обкатывает неподвижную шестерню 1. Резцы 10, установленные в корпусе 9, описывают гипотрохоидную кривую 15. Проворачивая корпус относительно подвижной малой шестерни-3,и фиксируя его положение стопором 12, можно получить семейство гипотрохоидных кривых, кото{нле имеют огибающую 16. Меняя радиальное положение резцов 10, можно расточить поверхность, образованную огибающей семейства гипотрохоид с заданной образующей а .
Для обработки внешних контуров огибающей режущая кромка резцов 10 должна быть обргицена к центру приспособления.
ut. г
Формула изобретения
1. Приспособление для обработки трохоидальньй поверхностей, содержащее планетарную передачу с большой шестерней внутреннего зацепления, связанной с корпусом станка и планетарной малой шестерней-сателлитом внешнего зацепления, установленной на валу, связанном через подшипник и кривошип со шпинделем станка и корпусом с резцами, отличающееся тем, что, с целью получения поверхности, образованной огибающей семейства трохоид, приспособление снабжено закрепленной в корпусе с резцами дополнительной планетарной шестерней - сателлитом внутреннего зацепления, связанной с малой планетарной шестерней-сателлитом внешнего зацепления, причем связь между корпусом с резцами и валом малой планетарной шестерни-сателлита внешнего зацепления выполнена в виде радиально-упорного подшипника и эксцентрикового стопора.
2. Приспособление по п. 1, отличающееся тем, что эксцентриковый стопор вьтолнен цанговым.ч
Источники информации, принятые во внимание при экспертизе;
1.Авторское свидетельство СССР 217895, кл. В 23 С 3/16, 1967.
2.Авторское свидетельство СССР 248446, кл. В 23 С 3/16, 1968.
3.Патент Великобритании №1957927 кл. В 3 С, 1962.
L
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для механической обработки гипотрохоидных поверхностей | 1976 |
|
SU580064A1 |
| Приспособление для механической обработки гипо (эпи) - трохоидных поверхностей | 1977 |
|
SU665988A1 |
| Устройство для механической обработки полов | 1982 |
|
SU1126284A1 |
| ЛЕБЕДКА | 1995 |
|
RU2099276C1 |
| Способ обработки резанием трохоидальных поверхностей и устройство для его осуществления | 1980 |
|
SU897405A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ НЕЙТРАЛИЗАЦИИ РАДИАЛЬНОЙ НАГРУЗКИ ОТ КОНТАКТИРУЮЩИХ ЗУБЬЕВ | 2017 |
|
RU2668451C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2602938C1 |
| Устройство для нанесения гальванических покрытий электронатиранием | 1983 |
|
SU1164319A1 |
| Поводковый патрон | 1989 |
|
SU1712070A1 |