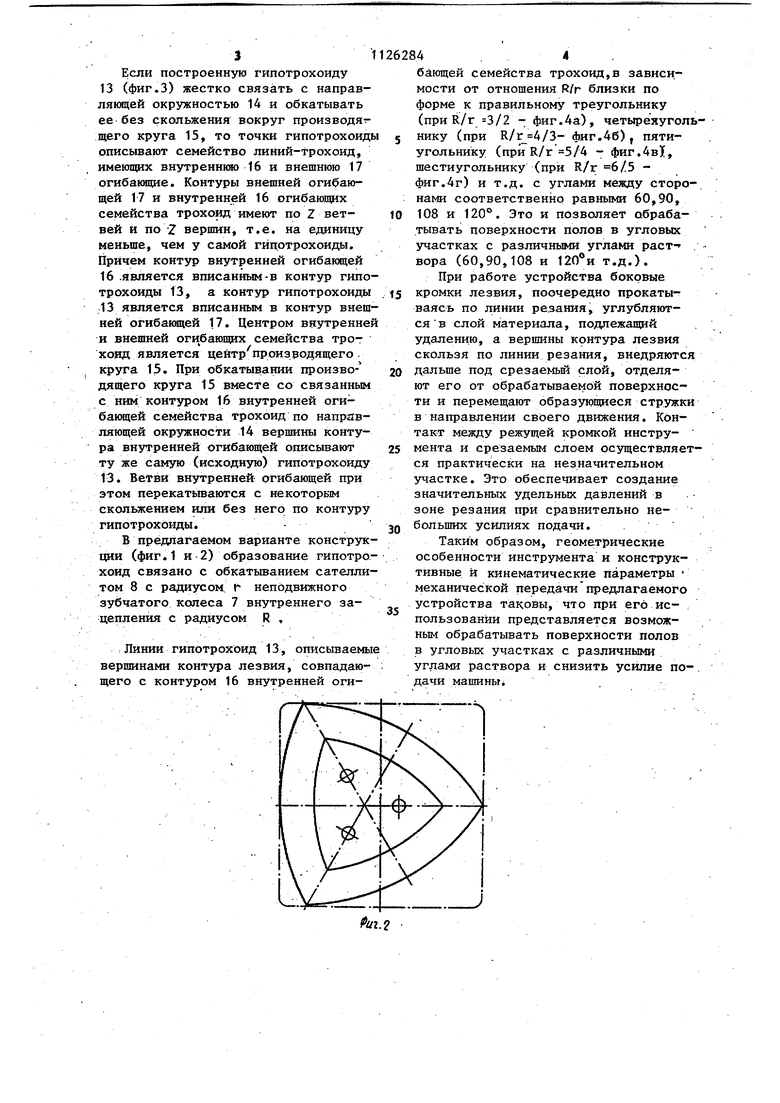
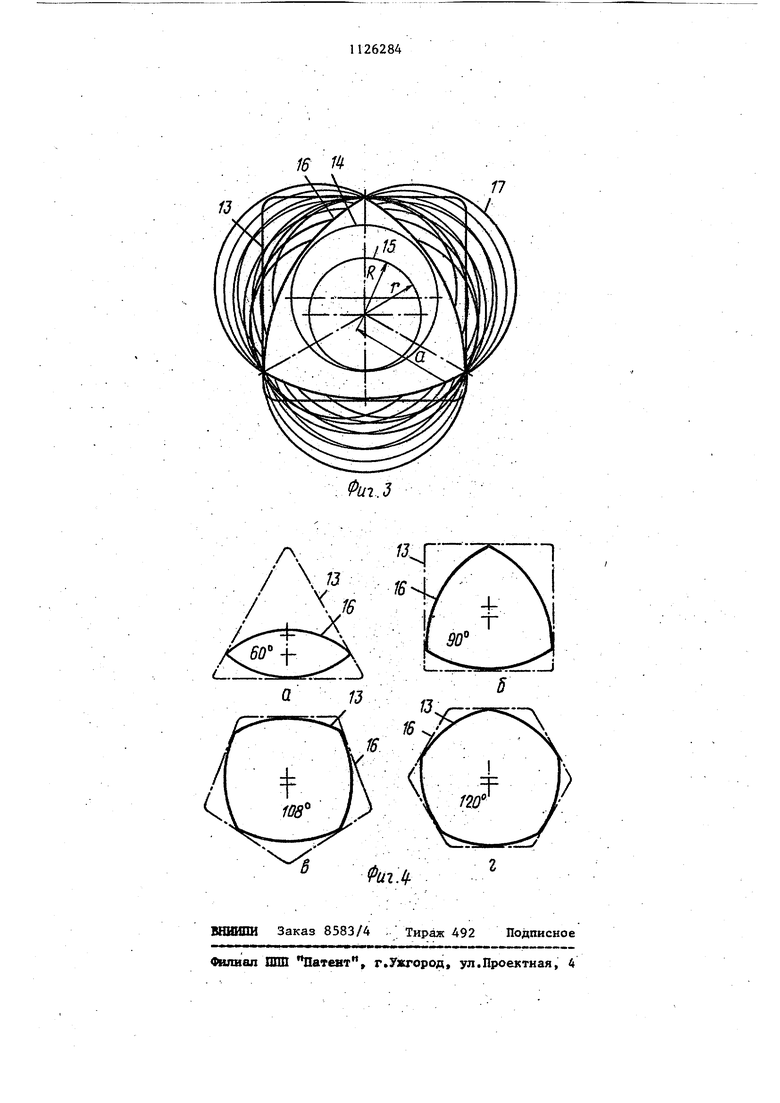
Изобретение относится к механиче кой обработке плоских поверхностей, в частности для чистки полов. Известно устройство для механической обработки полов, содержащее установленную на колесах раму, несущую двигатель, кинематически связанный с резцом, имеющим переменные по величине основания, большее из которых обращено в сторону обрабатываемой поверхности П 3Однако данное устройство не позволяет обрабатывать полы в угловых участках. Цель изобретения - расширение те нологических возможностей. Указанная цель достигается тем, что в устройстве для Механической обработки полов, содержащем установ ленную на колесах раму, несущую двигатель, кинематически связанный с резцом, имеющим переменные по величине основания, большее из которьпс обращено в сторону обрабатываемой поверхности, резец по контуру в полнен многоугольным и совпадает с контуром внутренней огибающей трохоид, а кинематическая связь резца с двигателем содержит плане-, тарную передачу, неподвижное колесо которой жестко укреплено на раме, а резец установлен соосно с сат теллитрм и связан с валом двигателя, причем отношение радиусов непо движного колеса К и сателлита равно . R Z + 1 . где Z - число вершин лезвия резца Нафиг.1 изображено устройство, общий вид; на фиг.2 - инструмент, вид со стороны лезвия-, на фиг.З образованние гипотрохоид; на фиг.4 (а,б,в,г)-возможные формь гипотро.хоид и внутренней огибающей в зависимости от отношения радиусов. Устройство содержит установленну на колесах 1 раму 2, несущую двигатель 3, кинематически связанный с р цом 4, имеющим переменные по величи не основания 5 и 6, большее из кото рых 6 обращено в сторону обрабатываемой поверхности. Резец 4 по контуру выполнен многоугольным и совпа дает с контуром внутренней огибающе трохоид, а кинематическая связь рез ца 4 с двигателем .3 содержит планетарную передачу, неподвижное колесо 7 которой жестко укреплено на раме 2, а резец 4 установлен соосно с 4 сателлитом 8 и связан с валом 9 двигателя 3. Резец 4 установлен на зксцентриковой шейке-10 вала 9 двигателя на подшипниках 11. Отношение радиусов неподвижного колеса и сателлита -2 - где Z - число верh Z шин лезвия резца. Уравновешивание центробежных сил инерции деталей, связанных с эксцентриковой шейкой 10 вала 9, осуществляется противовесом 12. Устройство работает следующим образом. При вращении вала 9 электродвигателя 3 сателлит 8 обкатывается внутри неподвижного зубчатого колеса 7, совершая планетарное движение. Вместе с сателлитом 8 планетарное движение совершает соосно связанный с нею резец 4. Ои вращается вместе с сателлитом 8 вокруг ее оси, которая в свою очередь вращается вокруг оси. вала 9 электродвигателя 2. При этом различные точки режущей кромки лезвия инструмента описывают те или иные линии-гипотрохоиды (гипоциклоиды). Обычно такие линии (фиг.З) определяются как траектории точек, связанных с кругом с радиусом f (производящий круг), которьй катится беэ скольжения по неподвижной ;окружности с радиусом R (направляющая окружность) внутри нее. В общем случае производящие точки могут лежать внутри или вне движущегося круга. Форма гипотрохоид, количество и расположение их вет вей зависят от отношения радиусов направляющей окрзтжйости и производящего круга, и от расстояния G (производящий радиус) от центра производящего круга до производящей точки. Если радиусы Риг относятся как целые числа, отличающиеся на единицу, например -|-(z+l|/2 3/2i 4/3; 5/4 .и т.д., то каждая из соответствующих гипотрохоид образует плоскую фигуру, у которой 2+1 конгруентных ветвей и столько же вершин (правильный треугольник, четырехугольник, пятиугольник и т.д.). В общем случае в зависимости от отношения G/Z ветви гипотрохоид могут быть выпуклыми, вогну- тыми или иметь прямолинейные участки. Если построенную гипотрохоиду 13 (фиг.З) жестко связать с направляющей окружностью 14 и обкатывать ее без скольжения вокруг производя щего круга 15, то точки гипотрохоид описывают семейство линий-трохоид, имеющих внутреннняо 16 и внешнюю 17 огибающие. Контуры внешней огибающей 17 и внутренней 16 огибающих семейства трохоид имеют по Z ветвей и по Z вершив, т.е. на единицу меньше, чем у самой гйдотрохоиды. Причем контур внутренней огибающей 16 .является вписанным-в контур гипо трохоиды 13, а контур гипотрохоиды 13 является вписанным в контур внеш ней огибакицей 17. Центром внутренне и внешней оги бающих семейства трохорд является центрпроизродящего . круга 15. При обкатывании производящего круга 15 вместе со связанным с ним контуром 16 внутренней огибающей семейства трохоид по направляющей окружности 14 вершины контура внутренней огибающей описывают ту же самую (исходную) гипотрохоиду 13. Ветви внутренней огибающей при этом перекатьгеаются с некоторвм скольжением или без него по контуру гипотрохоиды. В предлагаемом варианте конструк ции (фиг.1 и 2) образование гипотро хоид связано с обкатьгоанием сателли том 8 с радиусом, г неподвижного зубчатого колеса 7 внутреннего зацепления с радиусом R , Линии гипотрохоид 13, описываемы вершинами контзфа лезвия, совпадающего с контуром 16 внутренней огибающей семейства трохоид,в зависимости от отношения R/r близки по форме к правильному треугольнику (при R/r 3/2 - фиг.4а), четырехугольнику (при фиг.46), пятиугольнику (при R/r 5/4 - фиг.4в, шестиугольнику (при R/r 6/5 фиг.4г) и т.д. с углами между сторонами соответственно равными 60,90, 108 и 120°. Это и позволяет обрабатывать поверхности полов в угловых участках с различными углами раст- вора (60,90,108 и т.д.). При работе устройства боковые кромки лезвия, поочередно прокатываясь по линии резания, углубляются в слой материапа, подлежащий удалению, а вершины контура лезвия скользя по линии резания, внедряются дальше под срезаемый слой, отделяют его от обрабатываемой поверхности и перемещают образующиеся стружки в направлении своего движения. Контакт между режущей кромкой инстру- мента и срезаемым слоем осуществляется практически на незначительном участке. Это обеспечивает создание значительных удельных давлений в зоне резания при сравнительно небольших усилиях подачи. . Таким образом, геометрические особенности инструмента и конструктивные и кинематические параметры механичес:кой передачипредлагаемого устройства таковы, что при его ис- , пользовании представляется возможным обрабатывать поверхности полов в угловых участках с различными углами раствора и снизить усилие по-. дачи машины
| название | год | авторы | номер документа |
|---|---|---|---|
| Валковая дробилка | 1990 |
|
SU1726017A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОЛОВ | 2005 |
|
RU2305483C2 |
| Приспособление для обработки трохоидальных поверхностей | 1976 |
|
SU577099A1 |
| Устройство для нанесения гальванических покрытий электронатиранием | 1983 |
|
SU1164319A1 |
| Приспособление для механической обработки гипо (эпи) - трохоидных поверхностей | 1977 |
|
SU665988A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| УСТРОЙСТВО для ОБРАБОТКИ ТРОХОИДАЛЬНЫХ ПОВЕРХНОСТЕЙ | 1969 |
|
SU248446A1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ СФЕРОВИНТОВЫХ КОНИЧЕСКИХ ЗУБЧАТЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2309028C2 |
| Способ обработки резанием трохоидальных поверхностей и устройство для его осуществления | 1980 |
|
SU897405A1 |
УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОЛОВ, содержащее установленную на колесах раму, несущу7о Двигатель, кинематически связанный с резцом, имеющим переменные по величине основания, большее из которых л,. -;Г;;г . V 5%д.,,,,. . обращено в сторону обрабатываемой поверхности. отличающееся тем, ЧТО, с целью расширения технологических возможностей, резец .по контуру выполнен многоугольным и совпадает , с контуром внутренней огибающей трохоид, а кинематическая связь резца с двигателем содержит планетар.ну передачу, неподвижное колесо которой жестко укреплено на раме, а резец установлен соосно с.сателлитом и связан с валом двигателя, причем отношение радиусов неподвижного колеса И и сателлита г равно Z+1 f Z . где Z - число вершин лезвия резца. (Л с ю а ьо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для механической обработки плоских поверхностей | 1977 |
|
SU617032A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
