(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНТЕГРАТОР ПОСТОЯННОГО
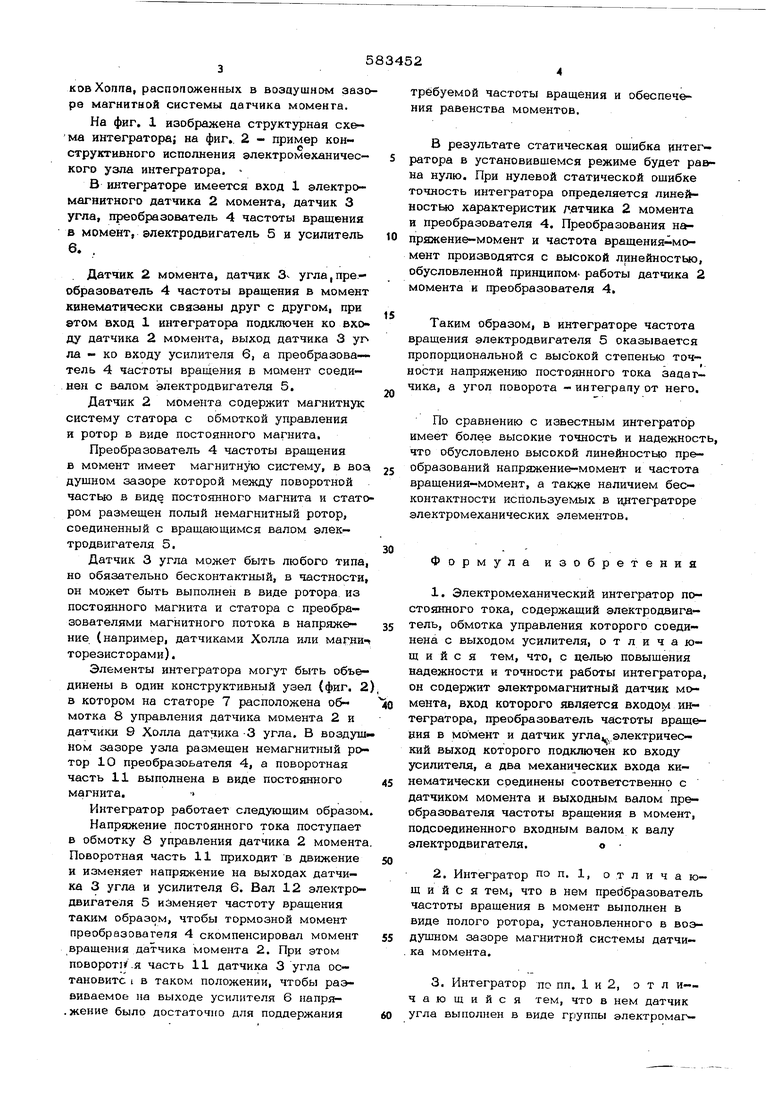
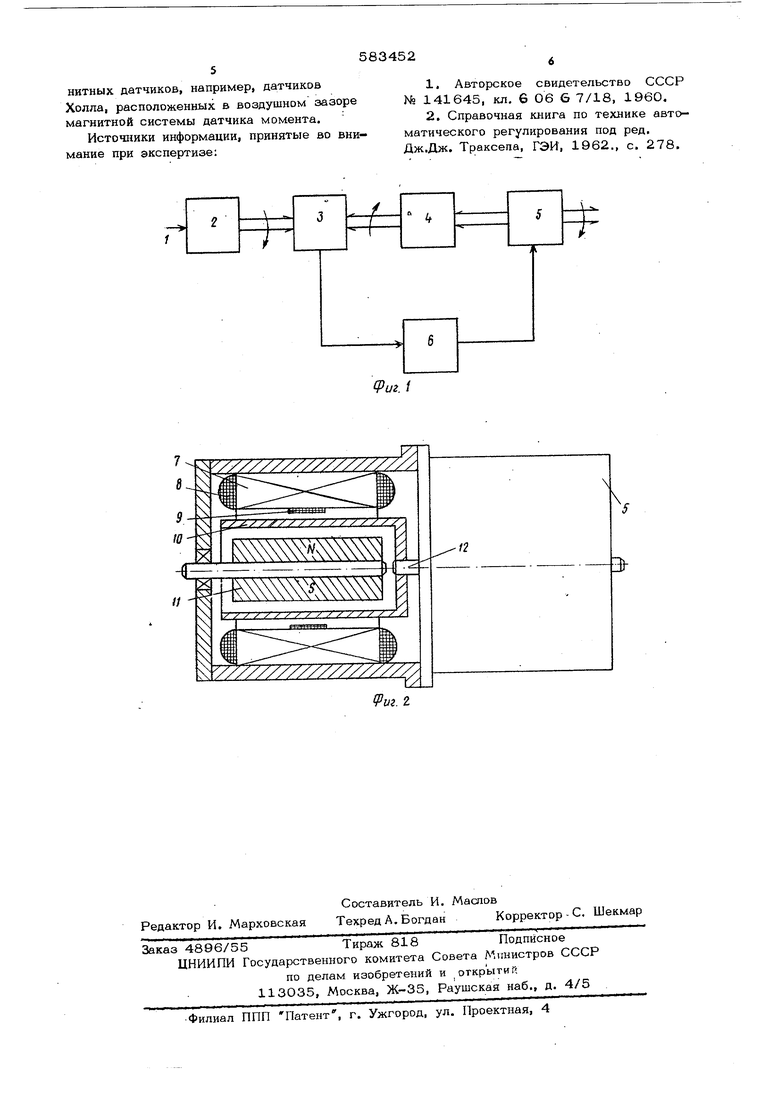
ТОКА ковХоппа, распопоженных в воздушном зазо ре магнитной системы датчика момента. На фиг. 1 изображена структурная схема интегратора; на фиг,. 2 - пример конструктивного исполнения электромеханичес- кого узла интегратора. « В интеграторе имеется вход 1 электромагнитного датчика 2 момента, датчик 3 угла, преобразователь 4 частоты вращения в момент, электродвигатель 5 и усилитель б. . Датчик 2 момента, датчик 3 угла,пре.образователь 4 частоты вращения в момент кинематически связаны друг с другом, при этом вход 1 интегратора подключен ко входу датчика 2 момента, выход датчика 3 уг ла - ко входу усилителя 6, а преобразователь 4 частоты вращения в момент соединен с валом (электродвигателя 5. Датчик 2 момента содержит магнитнук систему статора с обмоткой управления и ротор в виде постоянного магнита, Преобразователь 4 частоты вращения в момент имеет магнитную систему, в B03 душном зазоре которой между поворотной частью в виде постоянного магнита и стато ром размещен полый немагнитный ротор, соединенный с вращающимся валом электродвигателя 5. Датчик 3 угла может быть любого типа но обязательно бесконтактный, в частности он может быть выполнен в виде ротора из постошшого магнита и статора с преобразователями магнитного потока в напряжение (например, датчиками Холла или магни торезисторами). Элементы интегратора могут быть объединены в один конструктивный узел (фиг. 2 в котором на статоре 7 расположена обмотка 8 управления датчика момента 2 и датчики 9 Холла датчика -3 угла, В воздуш ном зазоре узла размещен немагнитный ро тор 10 преобразователя 4, а поворотная часть 11 выполнена в виде постоянного магнита, Интегратор работает следующим образом Напряжение постоянного тока поступает в обмотку 8 управления датчика 2 момент Поворотная часть 11 приходит в движение и изменяет напряжение на выходах датчика 3 угла и усилителя 6. Вал 12 электродвигателя 5 изменяет частоту вращения таким образом, чтобы тормозной момент преобразовагепя 4 скомпенсировал момент вращения датчика момента 2. При этом поворот) .я часть 11 датчика 3 угла остановите 1 в таком положении, чтобы раэвиваемое на выходе усилителя 6 напря. жение было достаточно для поддержания требуемой частоты вращения и обеспечения равенства моментов, В результате статическая ощибка интегатора в установивщемся режиме будет рава нулю. При нулевой статической ошибке очность интегратора определяется линей остью характеристик датчика 2 момента и преобразователя 4. Преобразования напряжение-момент и частота вращения-момент производятся с высокой линейностью, обусловленной принципом работы датчика 2 момента к преобразователя 4. Таким образом, в интеграторе частота вращения электродвигателя 5 оказывается пропорциональной с высокой степенью точости напряжению постоянного тока зацатчика, а угол поворота - интеграпу от него. По сравнению с известным интегратор имеет более высокие точность и надежность, что обусловлено высокой линейностью преобразований напряжение-момент и частота вращения-момент, а также наличием бесконтактности используемых в цнтеграторе электромеханических элементов. Формула изобретения 1. Электромеханический интегратор постоянного тока, содержащий электродвигатель, обмотка управления которого соединена с выходом усилителя, о т л и ч а ю- щ и и с я тем, что, с целью повышения надежности и точности работы интегратора, он содержит электромагнитный датчик момента, вход которого является входо1у1 интегратора, преобразователь частоты вращения в момент и датчик угла,,.. электрический выход которого подключен ко входу усилителя, а два механических входа кинематически соединены соответственно с датчиком момента и выходным валом преобразователя частоты вращения в момент, подсоединенного входным валом к валу электродвигателя.о 2.Интегратор по п, 1, о т л и ч а ющ и и с я тем, что в нем преобразователь частоты вращения в момент выполнен в виде полого ротора, установленного в воздущном зазоре магнитной системы датчи. ка момента. 3.Интегратор по пп. 1 и 2, о т л и- чающийся тем, что в нем датчик угла выполнен в виде группы электромагнитных датчиков, например, датчиков Холла, расположенных в воздушном зазоре магнитной системы датчика момента.
Источники информации, принятые во внимание при экспертизе:
1,Авторское свидетельство СССР № 141645, кл. 6 06 6 7/18, 1960.
2.Справочная книга по технике автоматического регулирования под ред. Дж.Дж. Траксепа, ГЭИ, 1962., с. 278.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое решающее устройство | 1975 |
|
SU558282A1 |
| Вентильный электропривод | 1990 |
|
SU1758788A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2051460C1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ И ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ УСИЛИТЕЛЯ РУЛЯ | 2005 |
|
RU2278797C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| АНАЛИЗАТОР ГАРМОНИК НЕСИНУСОИДАЛЬНЫХ НАПРЯЖЕНИЙ | 1972 |
|
SU344368A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
i
Х.
10
:
// Х / / у / X
f2
эУ////////////////77,
ш
