1
Изобретение относится к подъемно-транспортным устройствам и может быть применено для транспортировання труб, проката и т. п.
Известна траверса для транспортировки длинномерных изделий, содержащая балку с серьгой для навешивания на крюк крана, захватные крюки, установленные на балке в подшипниковых опорах, снабженные приводом их поворота вокруг вертикальной оси. Привод поворота крюков выполнен в виде гибкого тягового органа, например цепи, огибающей звездочки, закрепленные на хвостовиках крюков, и рукоятки с фиксатором, свя:,1иной € тяговым органом для фиксации по.ложен и я крюков 1 |.
Однако такие траверсы не нозволяют осуществлять автоматическую застройку груза и требуют использования ручного труда стропальщиков.
Известен также автоматический захват для длинномерных грузов, например лесоматериалов, расположенных в кармане-накопителе, содержащий несущую раму с закрепленными на ней гибкими грузовыми органами, состоящими из двух частей, соединенных между собой .замком , дистанционно управляемым от нривода.
Однако при работе таким захватом несущую раму с гибкими органами необходимо
установить точно над желобами кармановнакопителей. Это затрудняет использование захвата. Нижняя часть грузовых канатов имеет свойство свободно изгибаться в любых направлениях. Это затрудняет застройку, так как требует три направляющие поверхности желоба для совпадения корпуса замка с запором. Трудно установить, произошла или не произошла застройка груза, т. е. закрыт или не закрыт замок, находящийся в желобе под грузом. Наблюдение за данной операцией затруднено Потому, что замок находится в желобе нод грузом.
Цель изобретения - упрощение конструкции захвата.
Для ЗТ01Ч) гибкий грузовой орган выполнен но крайней мере из двух параллельных ценей, скреп; енных между собой.
Па фиг. 1 изображен предлагаемый захват, общий вид; на фиг. 2 - замок, продольный разрез; на фиг. 3 - то же, поперечный разрез; на фиг. 4 - расположение цепей в кармане-накопителе.
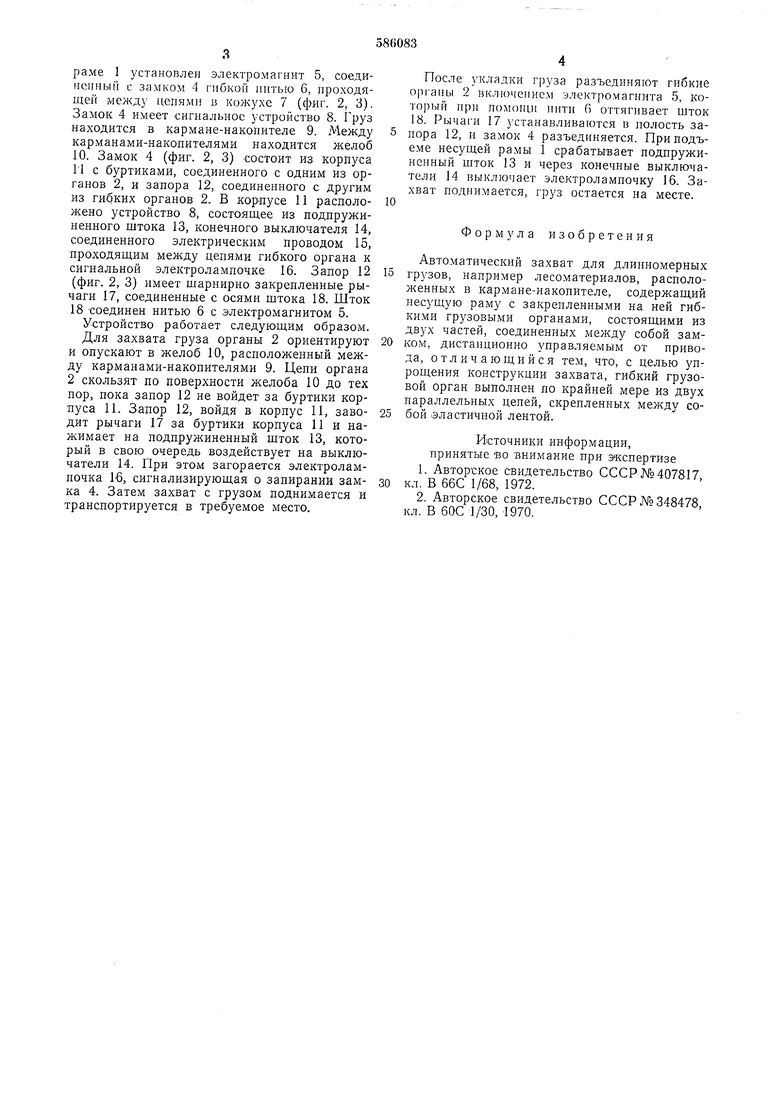
Захват содержит несущую раму 1, на которой закреплены два гибких органа 2. Каждый гибкий орган состоит из параллельно подвешенных втулочных цепей, соединенных между собой эластичной лентой 3. На нижнсГ; части органов 2 имеется замок 4. На вер.чней части одиого из гибких органов, на раме 1 установлен электромагнит 5, соединенный с замком 4 гнбкой пнтыо 6, нроходящей между цепями li кожухе 7 (фиг. 2, 3). Замок 4 имеет сигнальное устройство 8. Груз находится в кармане-накопителе 9. Между карманами-накопителями находится желоб 10. Замок 4 (фиг. 2, 3) состоит из корпуса Г1 с буртиками, соединенного с одним из органов 2, и запора 12, соединенного с другим из гибких органов 2. В корпусе И расположено устройство 8, состоящее из подпружиненного штока 13, конечного выключателя 14, соединенного электрическим проводом 15, проходящим меладу цепями гибкого органа к сигнальной электролампочке 16. Запор 12 (фиг. 2, 3) имеет шарнирно закрепленные рычаги 17, соединенные с осями штока 18. Шток 18 -соединен нитью 6 с электромагнитом 5. Устройство работает следующим образом. Для захвата груза органы 2 ориентируют и опускают в желоб 10, расположенный между карманами-накопителями 9. Цепи органа 2 скользят по поверхности желоба 10 до тех пор, пока запор 12 не войдет за буртики корпуса И. Запор 12, войдя в корпус И, заводит рычаги 17 за буртики корпуса 11 и нажимает на подпружиненный шток 13, который в свою очередь воздействует на выключатели 14. При этом загорается электролампочка 16, сигнализирующая о запирании замка 4. Затем захват с грузом поднимается и транспортируется в требуемое место. После укладки груза разъединяют гибкие органы 2 включением электромагнита 5, кото)1ый при помощи нити 6 оттягивает щток 18. Рычаги 17 устанавливаются в полость запора 12, и замок 4 разъеднияется. При подъеме несущей рамы 1 срабатывает подпружиненный щток 13 и через конечные выключатели 14 выключает электролампочку 16. Захват поднимается, груз остается на месте. Формула изобретения Автоматический захват для длииномерных грузов, например лесоматериалов, располол енных в кармане-накопителе, содержащий несущую раму с закрепленными на ней гибкими грузовыми органами, состоящими из двух частей, соединенных между собой замком, днста1щионно управляемым от привода, отличающийся тем, что, с целью упрощения конструкции захвата, гибкий грузовой орган выполнен по крайней мере из двух параллельных цепей, скрепленных между собой эластичной лентой. Источники информации, принятые ВО внимание при экспертизе 1.Авторское свидетельство СССР №407817, кл. В 66С 1/68, 1972. 2.Авторское свидетельство СССР № 348478 кл. В 60С 1/30, i970.
s
i:xaiirrHS
(pas. 2
12
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ | 1972 |
|
SU348478A1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
| Захват для длиномерных грузов | 1976 |
|
SU709502A1 |
| Захватное устройство для контейнеров | 1989 |
|
SU1726356A1 |
| Захватное устройство для контейнеров | 1990 |
|
SU1791336A1 |
| УСТРОЙСТВО для ЗАХВАТА ПАКЕТА ЛЕСОМАТЕРИАЛОВ | 1970 |
|
SU282145A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Грузозахватное устройство | 1987 |
|
SU1618722A1 |
| Продольный конвейер | 1989 |
|
SU1634609A1 |
| ПОДЪЕМНИК | 1996 |
|
RU2094355C1 |


