мент, пы с
Изобретение относится к области подъемно- ранспортного оборудования, а именно к юлуавтомагическим захватам для контейнеров,
И: вестно захватное устройство для кон- теине юв, содержащее навешиваемый и грузогодъемный механизм, несущий эле- инемэтически связанные с ним стро- элементами для. соединения с контейнерами и механизм отстропки.
Недостатком захвата является неизменность взаимного положения взятых контейнеров при перегрузке, при котором габаритные размеры груза не позволяют перегружать контейнеры из судна на автомашину без промежуточной перезастроп- ки с переориентацией части контейнеров.
Целью изобретения является расширение эксплуатационных возможностей гутем обеспечения разворота контейнеров,
Для достижения цели в захватном устройстве для контейнеров, содержащем на- . вешиваемый на грузоподъемный механизм несущий элемент, кинематически связанные с ним стропы с элементами для соединения с контейнерами и механизм отстрочки, последний включает в себя закрепленные на несущем элементе параллельно друг другу валы, закрепленные на валах рычаги, охватывающие валы возвратные пружины, гибкие тяги, прикрепленные одними концами к элементам для соединения с контейнерами, а другими - к рычагам, и связанный с рычагами контргруз, и кинематическая связь стропов с несущим элементом включает в себя закрепленную на
XI ю
CJ
со
ON
раме вертикальную ось, размещенный на ней кривошипно-шатунный механизм, связанный посредством рычажной системы с одним из валов и присоединенные к шатуну и одному из промежуточных рычагов траверсы, к которым присоединены стропы.
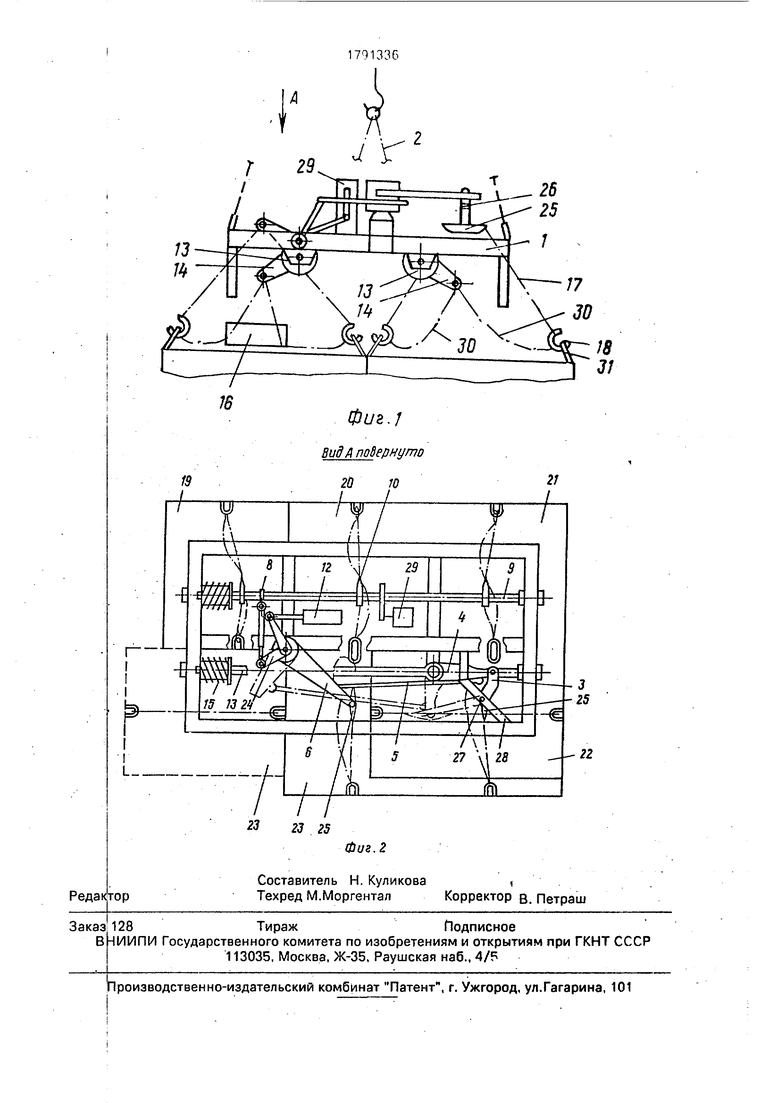
На фигЛ изображен предлагаемый захват, вид спереди; на фиг.2 - вид А на фиг.1.
Захватное устройство для контейнеров содержит: раму 1 с подвеской 2, пружикно- рычажную систему разворота двух контейнеров, включающую шатун 3, кривошип 4, тягу 5, кривошип 6, тягу 7, рычаг 8, вал 9 с рычагами 10, возвратную пружину 11, гидроцилиндр 12, механизм автоматической отстропки, включающий два вала 13с рычагами 14 и возвратными пружинами 15, замок циклического действия 29, управляющий груз 16,
Захватное устройство работает следующим образом.
Его кран устанавливается над рядами контейнеров, после чего пять из них 19, 20, 21, 22, 23 вручную застропливаются с помощью грузовых цепей 17 с крюками 18 за петли 31.
При перегрузке после взятия контейнеры 19, 20, 21, подвешенные с помощью рычагов 10 на валу 9, заставляют последний поворачиваться, перемещая посредством рычага 8 тягу 7, которая в свою очередь через кривошип 24 и тягу 5 передав/, вращение кривошипам 4 и 6 по часовой стрелке. Контейнеры 22 и 23 подвешиваются соответственно на шатун 3 и кривошип 6 с помощью траверс 25 через шарниры 26, исключающие возможность вращения траверс 25 относительно шатуна 3 и кривошипа 6. Шарнир 26 шатуна 3 снабжен роликом 27, который перемещается в направляющих 28, что позволяет траверсе 25 и подвешенному на ней контейнеру 22 совершать сложное движение с разворотом против часовой стрелки на 90°. Контейнер 23 также разворачивается на 90 по часовой стрелке.
После разворота контейнеров, габаритный размер груза сокращается (с 2600 до 2200 мм), что позволяет устанавливать груз
на автомашину посредством опускания захвата с грузом до момента срабатывания замка циклического действия 29 после касания управляющего груза 16 контейнеров,
после чего выбирается слабина управляющих цепей 30 за счет подъема рычагов 14 на валах 13 усилием возвратных пружин 15.
При последующем подъеме захвата грузовые цепи 17 с крюками 18 освобождаются
от груза,
После снятия нагрузки при установке контейнеров на автомашину с грузовых цепей 17 система рычагов 10, кривошип 6, шатун 3 приходят в исходное положение с
помощью возвратной пружины П,
Скорость разворота контейнеров 22 и 23 и возврата в исходное положение пружинно-рычажной системы разворота контейнеров регулируется с помощью
дросселей (не показаны) гидроцилиндра 12, кинематически связанного с системой.
Ф о р м ула изобретения Захватное устройство для контейнеров,
содержащее навешиваемый-на грузоподъемный механизм несущий элемент, кинематически связанные с ним стропы с элементами для соединения с контейнерами и механизм отстропки, отличающее с я тем, что, с целью расширения эксплуатационных возможностей путем обеспечения разворота контейнеров, механизм отстропки включает в себя закрепленные на несущем элементе параллельно друг другу
валы, закрепленные на валах рычаги, охватывающие валы возвратные пружины, гибкие тяги, прикрепленные одними концами к элементам для соединения с контейнерами, а другими - к рычагам, и связанный с рычагами контргруз, а кинематическая связь стропов с.несущим элементом включает в себя закрепленную на раме вертикальную ось, размещенный на ней кривошипно-шатунный механизм, связанный посредством
рычажной системы с одним из валов, и присоединенные к шатуну и одному из упомянутых рычагов траверсы, к которым присоединены стропы.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров | 1988 |
|
SU1705226A1 |
| Захватное устройство для контейнеров | 1984 |
|
SU1196328A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Захватное устройство для контейнеров | 1979 |
|
SU802163A1 |
| Захватное устройство для контейнеров | 1980 |
|
SU1018898A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
Использование: изобретение относится к области подземно-транспортного оборудования, а именно к полуавтоматическим захватами д/гя контейнеров. Захватное уст- ройст зо для контейнеров содержит раму 1 с канатной подвеской, пружинно-рычажную систему разворота двух контейнеров, включающую поворачивающийся относительно закрепленной на раме оси кривошип и связанный с кривошипом шарниром шатун, соединяющую посредством шарниров тягу с кривошипом и с поворачивающимся относительно закрепленной на раме оси рычагом. На валу установлены рычаги, на которые воздействуют возвратные пружины растяжения, установленные на раме посредством кронштейнов, и рычаги, соединенные с помощью шарниров со штоками гидроцилиндров, стабилизирующих скорость разворота контейнеров. Корпус гидроцилиндра закреплен посредством шарнира на раме. Подлежащие развороту контейнеры подвешиваются каждый с помощью пары стропов с крюками к траверсам. Остальные три контейнера не подлежат развороту и подвешиваются каждый на раме стропов к траверсам, которые соединяются с рычагами с помощью шарниров. 2 ил. ел с
Редактор
Составитель Н. Куликова(
Техред М.МоргенталКорректор в. Петраш
| Прибор для переработки спирта в газовую смесь для двигателей внутреннего сгорания | 1920 |
|
SU589A1 |
