сителыюго вращения вокруг оси у со скоростью повернуты в плоскости z0x на угол
(а-).
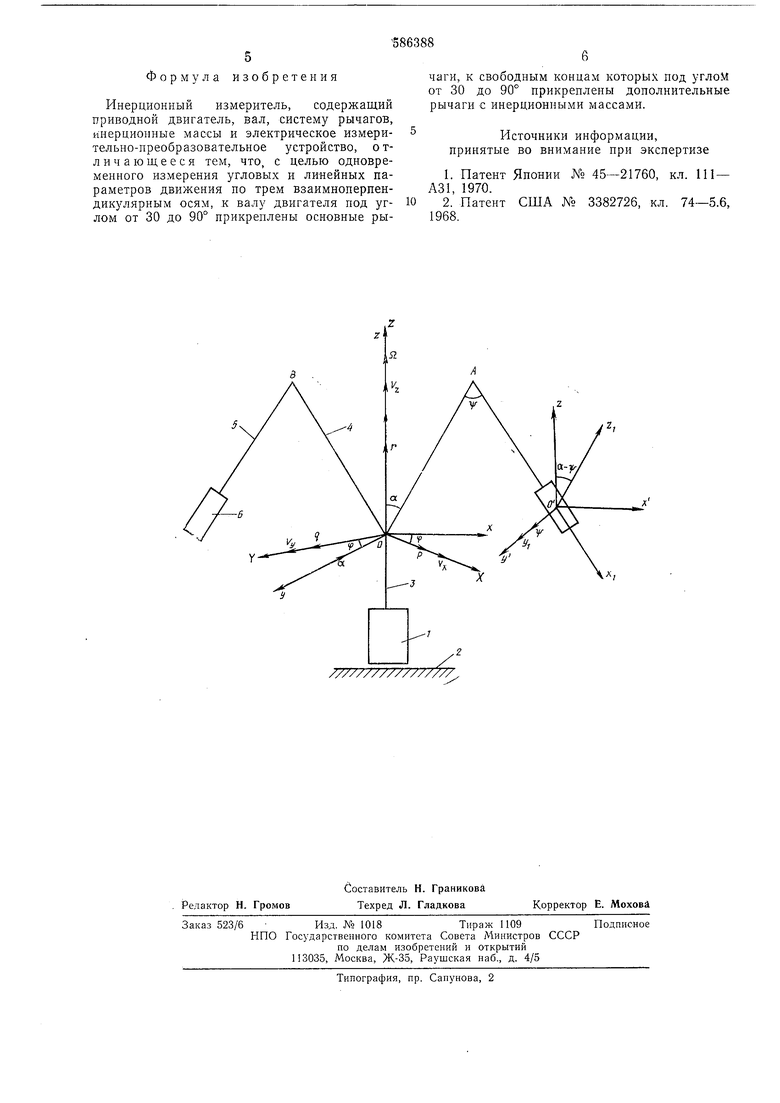
Приводной двигатель 1 установлен на подвижном основании 2. На выходном валу 3 двигателя в точке О при помощи упругой (торсионной) системы подвеса присоединены основные рычаги 4. В точках Л и S к основным рычагам 4 прикреплены также при помощи упругой связи дополнительные рычаги 5 с инерционными массами 6. Предполагается, что торсионы имеют бесконечную жесткость на изгиб и конечную на кручение.
Принцип работы инерционного измерителя состоит в следующем.
При вращении приводного двигателя со скоростью О, в случае отсутствия возмущений за счет действия центробежных сил инерционные массы отклоняются от исходного положения на постоянные для данной конструкции углы ао и (OQ-г|}о). При наличии возмущающих воздействий (угловое и линейное перемещение подвижного основания) уравнения движения каждой инерционной массы по координатам а и i|j при условии ао г|зо можно записать в виде
5,Да + |х + 5,Аа + 5зГ+
+ 5, (у COS р - у, sin ср) - (5,+5,) X
x(j.),
C.Aij; -Ь |лфд + C,Ai + С, (р cos т - ) - C r-}-h b - + B,(j + qV,-pVy) Q,
где Да а - «(,;
В,В + т (a+l-i-2at sin ); B.,h + u C-A+m(a+2atsina -icos2y.,), Вз - mQl (а cosoio -f sin «о); В ml cos «о; В ml sin
5а : та; ДФ : «j - %;
Ci г 5 + та; ,j, + й° 1(С-Л) COS (а COSao4- /Sinao);
Сз r Q (С - Л) COS «о + га (acosao + /sinotj); С ZmQalsina ;
А, В и С - моменты инерции грузика;
т - масса грузика;
и щ-коэффициенты демпфирующего момента по координатам а и
и h,,,-коэффициенты восстанавливающего момента по тем же, координатам;
а и / - длины дополнительного и основного рычагов системы подвеса;
/X, /1/ и /г - проекции) линейных ускорений
Как следует из уравнений (2), величины
Предполагается, что начальная настройка прибора произведена из условий
Аа а,ml и (2а cos а„ + i sm2 а) О
А - С - + 21sin«„ + а/ (,о) О
Ренюние уравнений (1) можно записать S виде:
А« - 1(5 + В,) (у; + 1/, - pV)
- -64 (Jx COS (р - Jy sin tt) -
C
(2)
Д- - - - Сз (р cos -f-q sin f) -
5e(/. ,)
Как следует из уравнений (2), величины Да и Аф несут информацию об угловых и линейных параметрах движения основания, на котором установлен измеритель. Если по
каждому из отклонений Да и Дф реализовать систему съема и преобразования управляющего сигнала по двум взаимноперпендикулярным осям, то на выходе соответствующих датчиков будут сняты сигналы, которые пропорциональны отклонениям:
DU - , ( - )
, D Да, 4- ( ) . +
2
+ Bjy-B,r, Ds. - - т + в.) (f.,) +
В,
+ , D4. - Да, : J- (5,-f 5,) () 02
Dtb - Дф, IQr - Сз/ 5, X
02
X(y. + ,,); 2. - С,г - Сз - Д, X
О2
X(y; + ,); Ds. С.г + - 5« X
02
X(y; + l,-/jFy)l; 0,-; - До,: - С,г + Сзд - 5. X
Сг
X(y. + gV --y5F,)
Разделение сигналов выполняется по схее:
2Сз
Up - (Dg, - DI.) - АФ1
/У, - {D,, - D,.,) Д , .
(Оз, - Z)i,) - Дяз-
Uj - (Оз. - Z)4,) - Д/, : Да,
Формула изобретения
Инерционный измеритель, содержащий приводной двигатель, вал, систему рычагов, инерционные массы и электрическое измерительно-преобразовательное устройство, отличаюш,ееся тем, что, с целью одновременного измерения угловых и линейных параметров движения по трем взаимноперпендикулярным осям, к валу двигателя под углом от 30 до 90° прикреилены основные рычаги, к свободным концам которых иод углом от 30 до 90° прикреплены дополнительные рычаги с инерционными массами.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии XQ 45-21760, кл. 111 - А31, 1970.
2.Патент США № 3382726, кл. 74-5.6, 1968.

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных пераметров движения основания | 1975 |
|
SU532052A1 |
| Интегрирующий акселерометр | 1978 |
|
SU794540A1 |
| Способ определения формы сферической поверхности изделий | 1989 |
|
SU1668850A1 |
| ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1973 |
|
SU390359A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ, ПРЕОБРАЗУЮЩЕЕ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ ВРАЩАЮЩЕГОСЯ ВАЛА В УПРАВЛЯЕМОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2009 |
|
RU2416048C2 |
| Акселерометр | 1974 |
|
SU494698A1 |
| Двухкоординатный датчик угловой скорости | 1976 |
|
SU570843A1 |
| Учебный прибор по физике | 1985 |
|
SU1300538A1 |
| Измеритель S - параметров четырехполюсника СВЧ | 1989 |
|
SU1682941A1 |
| Стенд для градуировки и определения жесткости ротационных динамометров и тензометрических валов | 1989 |
|
SU1749737A2 |
