тему вокруг оси у с постоянной угловой скоростью Q const. Под действием возникающих при этом центробежных сил F ml-Qr (где т - масса всех элементов, имеющих свободу вращения вокруг оси х) ось собственного вращения роторов занимает по отношению к оси у пернендикулярное положение. Суммарный кинетический момент относительно оси z в данном случае равен нулю. Выходные сигналы с тахогенераторов 8 и 9 одинаковы по величине и противоположны по зиаку. Сигнал па выходе сумматора равен нулю.
Пусть теперь нрибор перемещается вдоль
оси у с ускорением у.
Возникающая при этом инерционная сила
создает относительно оси х подвеса гироузла момент
М F-l тГу.
Действию момента М препятствует действие .момеита центробежных сил УИцб г F/sin (при малых |3), а
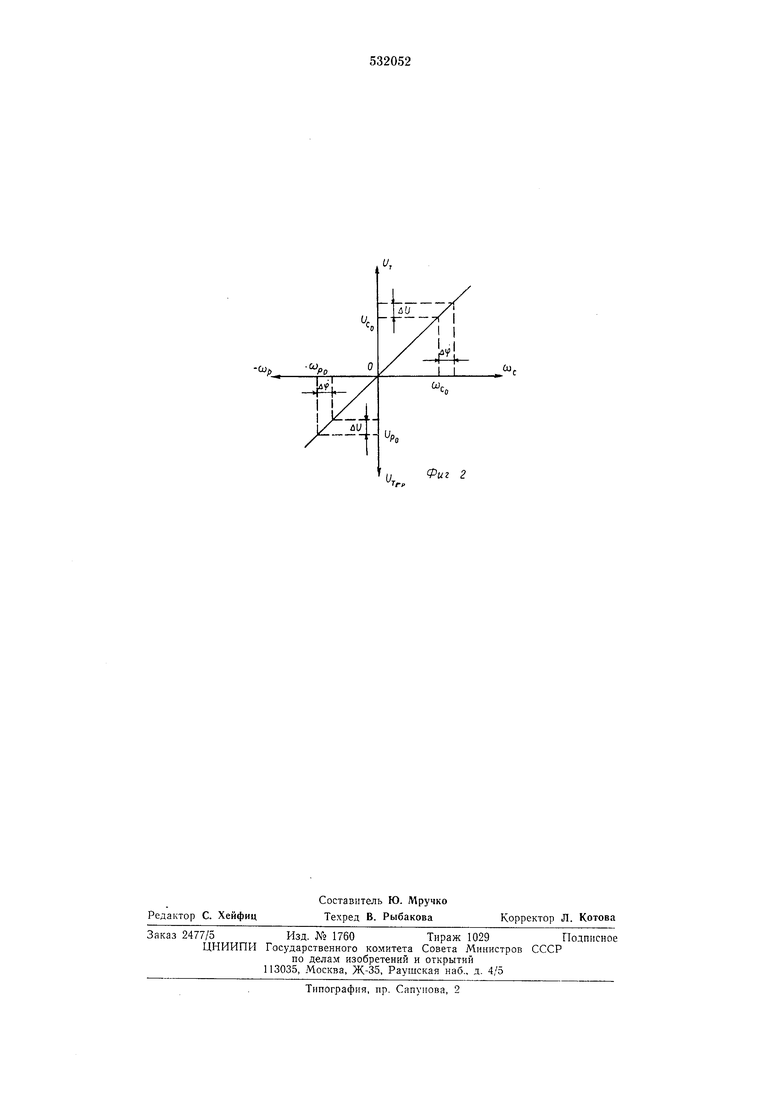
также момента торсиопа Л1т , где h-коэффициент жесткости торсиона. При отклонении гироузла от ортогонального положения на угол р с датчика сигнала II снимается управляющий сигнал f/fi, который подается на датчик момента 12. Датчик момента притормаживает ротор 6 и последний начинает вращаться с угловой скоростью (-сор -|-Аф). Ротор 7 соответственно начинает вращаться с угловой скоростью (шсо + Аф). Если две эти скорости сложить с учетом их знаков (шс„+Аф) + + (-Ир„+Аф)2Лф, то результирующая угловая скорость 2Лф кр, где к - коэффициент пропорциональности, будет способствовать возникновенню относительно оси z кинетического момента Я С1-2Аф, что вызывает поа)
яиление огиоснтелыю оси х, гироскопического момента
Жг /yQ : 2C,QAT,
который совместно с М компенсирует действие моментов MT и Л1цб В установившемся режиме
. kml
h + - CiQK
После суммирования выходных сигналов тахогенераторов 8 и 9 на сумматоре 10 получим
2K-Ki-m-l
-у К,у,
и„
- CiQK
Т. е. выходной сигнал будет пропорционален ускорению. При принятии за выходную величину угла поворота выходной оси роторов 7 и 6 получим сигнал, пропорциональный скорости движения.
Формула изобретения
Датчик линейных параметров движения основания, содержащий внешнюю рамку с гирокамерой, электродвигатель, инерционную массу, датчик управляющего сигнала и датчик .выходного сигнала, отличающийСя тем, что, с целью новыщения чувствительности, гирокамера выполнена в виде двух роторов, зращающихся в разных направлениях, и двух тахогенераторов, выходы которых объединены па сумматоре, а датчик управляющего сигнала соединен с регулятором скорости вращения одного из роторов гирокамеры.
Источник информации, принятый во внимание при экспертизе:
1. Е. А. Никитин и др., «Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, М., «Машиностроение, 1969, стр. 136.
6)
Фиг- I
-w,
-COu
PD
Ш,
Co

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Ротационный вискозиметр | 1976 |
|
SU651233A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Установка для снятия механических характеристик гиромотора | 2019 |
|
RU2701458C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Устройство для измерения угловой скорости | 1991 |
|
SU1793382A1 |
nФиг 2
